

2.4. Качественные показатели сау
Качество системы имеет смысл выяснять только после установления, что она устойчива. Наглядно представление о динамических свойствах САУ, ее качестве дает переходная функция. Качество системы характеризуется следующим: как быстро система реагирует на возмущения и как сильно их подавляет, каким путем она приходит в установившееся состояние и насколько точно воспроизводятся системой полезные сигналы после того, как установившееся состояние достигнуто.
Комплекс требований, определяющих поведение системы в установившемся и переходных процессах отработки заданного воздействия объединяется понятием качества процесса управления (качества системы).
К основным показателям качества САУ относятся:
- быстродействие,tпп;
- перерегулирование;
- колебательностьМ;
- статическая и динамическая точность;
- добротность системы.
Быстродействие характеризуется (рис.10):
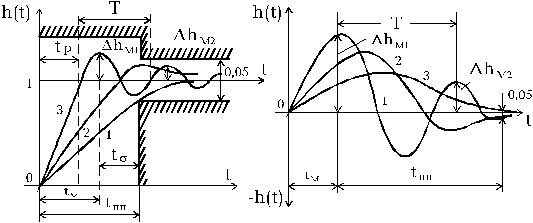
Рис.10. Типовые переходные функции САУ и показатели качества: а - управляющее воздействие; б - возмущающее воздействие; I - монотонные; 2 - апериодические; 3 - колебательные
а) общим временем переходного процесса tпп, за которое выходная величина h(t) войдет в 5% зону. Современные САУ требуют tпп0,04-0,1;
б) временем первого согласования (регулирования) tp за которое h(t) первый раз достигнет предполагаемого установившегося состояния;
в) временем первого максимума tм;
г) временем затухания первого перерегулирования tМ.
Перерегулирование %определяется максимальным отклонением выходной величины (перерегулирование h1), отнесенным к ее заданному установившемуся значению. Считается нормальным ,допускается до 50%, но в ряде случаев требуется 5%.
Колебательность характеризуется 4-мя показателями:
1. Показатель колебательности М, представляющий собой резонансное значение амплитудно-частотной характеристики замкнутой системы в относительных единицах
M=f()
или
![]() .В
хорошо сдемпфированных системах с
перерегулированием не более 20-30%
показатель М=1,1...1,3. Допускается до
1,6...1,8 при норме 1,3...1,5.
.В
хорошо сдемпфированных системах с
перерегулированием не более 20-30%
показатель М=1,1...1,3. Допускается до
1,6...1,8 при норме 1,3...1,5.
2. Числом колебаний n в одну сторону за время tпп. Чаще всего допускают n=1...2, а иногда 3...4.
3. Декрементом затухания , равным отношению модулей двух сменных перерегулирований
=hм1/hм2.
4. Угловой частотой колебанийк=2/Tк .
Добротность
системы ![]() ,
гдеW(P)=D0+DскP+DускP2;
W(P)=
,
гдеW(P)=D0+DскP+DускP2;
W(P)=![]() определяется
по ЛАЧХ, продлив низкочастотную асимптоту,
идущую с наклоном 20 дБ/дек, до пересечения
с осью частот. Получим добротность
системы по скорости. До пересечения с
осью частот продлим низкочастотную
асимптоту, идущую с наклоном 40 дБ/дек,
и получим добротность по ускорению.
определяется
по ЛАЧХ, продлив низкочастотную асимптоту,
идущую с наклоном 20 дБ/дек, до пересечения
с осью частот. Получим добротность
системы по скорости. До пересечения с
осью частот продлим низкочастотную
асимптоту, идущую с наклоном 40 дБ/дек,
и получим добротность по ускорению.
По среднечастотному участку ЛАЧХ определяют приблизительные показатели качества САУ.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: 1975.
Бессекерский В.А. и др. Сборник задач по теории автоматического регулирования и управления. - М.: Наука, 1972.
Воронов А.А. Основы теории автоматического управления. - М.: Энергия, 1980. 546 с. илл.
Емельянов В.М. Теория автоматического управления и автоматизация сварочных процессов. Учебное пособие. - Курск.гос.техн.ун-т,1996.112с.
Лукас В.А.Основы теории автоматического управления. - М.: Недра, 1977. 614 с. илл.
Львов Н.Э., Еладков Э.А. Автоматика и автоматизация сварочных процессов. - М.: Машиностроение, 1982, 302с.
Майзель М.М., Пятой Л.Л. Автоматизация процессов легкой промышленности. - М.: Машиностроение, 1973.
Подчукаев В.А. Теория автоматического управления. Аналитические методы: учебник с грифом «Допущено Министерством образования и науки в качестве учебника для бакалавров и магистров направления «Автоматизация и управление» и дипломированных специалистов направления «Автоматизация и управление». - М.: Физматлит, 2005. 392 с.
Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1978. 255с.
Передаточная функция звена системы автоматического управления: Методические указания к практической (самостоятельной) работе по дисциплине "Теория автоматического управления" /Курск.гос.техн.ун-т; Сост.В.М. Емельянов.Курск, 1994,12с.
Подчукаев В.А., Кондрашов А.С. Вычислительный ресурс класса WEB 2.0: среда аналитических вычислений «АНАЛИТИК-С». Интернет и инновации: практические вопросы информационного обеспечения инновационной деятельности: м-лы межд. научно-практической конференции. – Саратов: Сарат. гос. техн. ун-т, 2008. С. 115-117.
Подчукаев В.А. Автоматическое проектирование атомарно-молекулярной структуры наноэлектронных компонентов микросистемной техники. Управление и информационные технологии (УИТ-2008): доклады 5-й научной конференции, Санкт-Петербург, 14-16 окт. 2008 г./СПбГЭТУ «ЛЭТИ». 2008. в 2-х т. Т.2. С. 87-89.
Подчукаев В.А., Шевченко Д.С. Автоматическое проектирование технической реализации законов управления на платформе программируемых аналоговых интегральных схем производства компании Anadigm. Мехатроника, автоматизация, управление». 2008. № 7. С. 54.
Подчукаев В.А., Шевченко Д.С. Автоматическое проектирование атомарно-молекулярной структуры наноэлектронных компонентов микросистемной техники. Труды XXXV юбилейной международной конференции «Информационные технологии в науке, образовании, телекоммуникации и бизнесе «IT+S&E’08» (приложение к журналу «Открытое образование»). Украина, Крым, Ялта-Гурзуф, 2008. С. 47-49.
Подчукаев В.А., Шевченко Д.С. Аналитическое проектирование технической реализации законов управления. Мехатроника, автоматизация, управление . 2007. № 7. С.33-39.
Построение временных характеристик звеньев систем автоматического управления: Методические указания к практической (самостоятельной) работе по дисциплине "Теория автоматического управления" /Курск.гос.техн.ун-т; Сост.В.М. Емельянов.Курск, 1995, 15с.
Построение частотных характеристик звеньев систем автоматического управления:Методические указания к практической (самостоятельной) работе по дисциплине "Теория автоматического управления" /Курск, гос. техн. ун-т;Сост. В. М. Емельянов.Курск, 1995.15с.
Преобразование дифференциальных уравнений звеньев САУ в параметрический вид по Лапласу: Методические указания к практической (самостоятельной) работе по дисциплине "Теория автоматического управления Курск. гос. техн. ун-т;Сост. Емельянов. Курск, 1994.11с.
Составление дифференциальных уравнений звеньев систем автоматического управления. Методические указания к практической (самостоятельной) работе по дисциплине "Теория автоматического управления Курск. гос. техн. ун-т;Сост. Емельянов. Курск, 1994.10с.
Юревич В.И.Теория автоматического управления. - Л.: Энергия, 1975. 516 с. илл.
Шляндин В.Н. Элементы автоматики и счетные решающие устройства. М.: Машиностроение. 1967.