

СОДЕРЖАНИЕ
1.Введение 2
2.Практические занятия 3
2.1. Модели линейных систем автоматического управления 3
2.2. Эквивалентные преобразования в структурных схемах 8
2.3. Характеристики линейных систем автоматического управления 12
2.3. Устойчивость линейных систем автоматического управления 15
2.4. Качество линейных систем автоматического управления 20
2.5. Модели нелинейных систем автоматического управления 23
2.6. Анализ нелинейных систем автоматического управления 23
2.7. Модели дискретных систем автоматического управления 23
2.8. Анализ дискретных систем автоматического управления 23
3.Лабораторные работы 24
3.1. Исследование типовых динамических звеньев 24
3.2. Устойчивость систем автоматического управления 24
3.3. Качество систем автоматического управления 24
3.4. Оптимизация систем автоматического управления 24
4.Творческие и дополнительные задания 25
Список литературы 26
Введение
Практические занятия
2.1. Модели линейных систем автоматического управления
Рассмотрим построение математической модели на примере линейной электрической цепи.
Компонентами линейной электрической цепи являются: резистор, конденсатор и катушка (Рисунок 2 .1). Модели компонентов описываются следующими уравнениями:
|
|
(2.1) |
где R, C, L – сопротивление резистора, емкость конденсатора и индуктивность катушки соответственно; IR, IC(t), IL(t) – токи через резистор, конденсатор и катушку соответственно; UR, UC(t), UL(t) – падение напряжения на резисторе, конденсаторе и катушке.
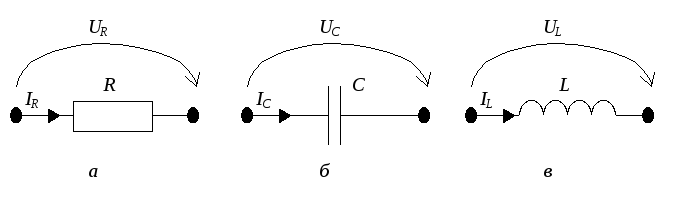
Рисунок 2.1 – Компоненты линейных электрических цепей.
Если
принять оператор дифференцирования
![]() ,
то уравнения ( 2 .1) можно записать в
следующем, операторном виде:
,
то уравнения ( 2 .1) можно записать в
следующем, операторном виде:
|
|
(2.2) |
Законы Киргофа:
Сумма токов в узле равна нулю. Или сумма токов, входящих в узел, равна сумме токов, исходящих из узла.
Сумма падений напряжений в контуре равна нулю. Или сумма генерируемых напряжений, равна сумме потребляемых напряжений в контуре.
|
|
(2.3) |
где n – номер ветви смежной с узлом, m – номер компонента в контуре.
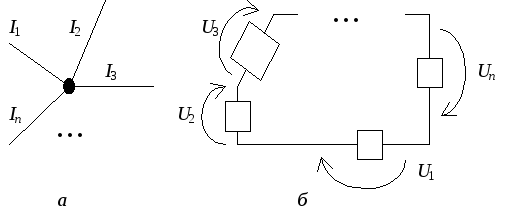
Рисунок 2.2 – Пояснение законов Киргофа
Алгоритм составления системы уравнений схемы:
Пометить узлы и расставить направления токов в ветвях.
Выбрать множество базовых контуров схемы и направления их обходов.
Для каждого узла схемы (кроме узлов с нулевым потенциалом) составить уравнение по первому закону Киргофа.
Для каждой ветви смежной с узлом: записать в левую часть уравнения ток ветви (в качестве слагаемого). Причем перед током поставить знак плюс если выбрано направление входящее в узел, иначе – знак минус.
В правой части уравнения записать ноль.
Для каждого выбранного базисного контура схемы составить уравнение по второму закону Киргофа.
Для каждого компонента в контуре: если компонент является потребителем записать напряжение в левую часть уравнения, если компонент является источником напряжения – в правую часть уравнения. Причем, если выбранное направление тока в ветви компонента совпадает с направлением обхода контура, то перед напряжением поставить знак плюс, иначе – знак минус.
Конец.
Пример 2.1
Дана схема (Рисунок 2 .3 – Пример линейной электрической цепи), известны параметры всех компонентов: E, R1, L2, C3. Построить систему уравнений.
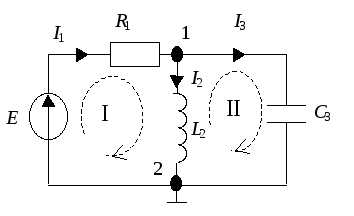
Рисунок 2.3 – Пример линейной электрической цепи
Решение.
Пометим узлы арабскими цифрами. Узел2 имеет нулевой потенциал. Схема содержит три ветви: 1) узел2, E, R1, узел1; 2) узел1, L2, узел2; 3) узел1, C3, узел2. Произвольно выберем направления токов в каждой ветви.
Выберем множество базисных контуров, таких контуров два: I) узел2, E, R1, узел1, L2, узел2; II) узел2, L2, узел1, C3, узел2.
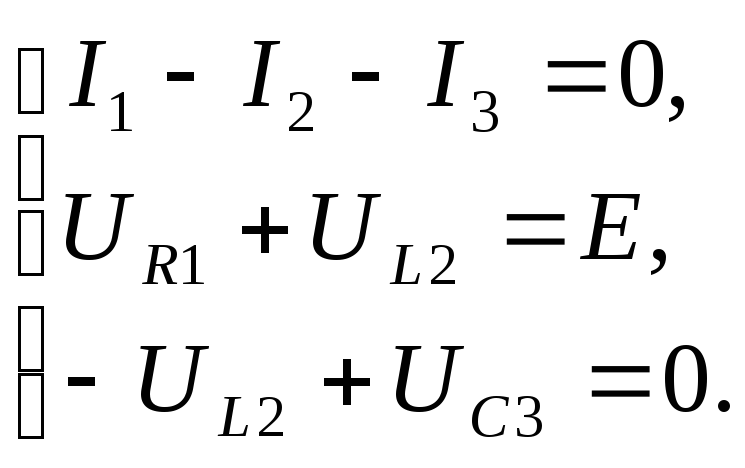
Для узла1 составим уравнение по первому закону Киргофа: I1-I2-I3=0.
Составим уравнения для контуров I и II:
Для контура I: E – источник напряжения, поэтому помещаем в правую часть уравнения, R1 – потребитель, поэтому помещаем в левую часть уравнения, L2 – потребитель, тоже в левую. Ток I1 совпадает с направлением обхода контура I, поэтому перед E и UR1 знак плюс. Ток I2 совпадает с обходом контура I, поэтому перед UL2 знак плюс. Получаем уравнение: +UR1+UL2 = E.
Аналогично для контура II: L2 и С3 – потребители, поэтому напряжения для них записываем в левую часть. Ток I2 не совпадает с направлением обхода контура II, поэтому перед UL2 знак минус. Ток I3 совпадает, поэтому перед UС3 знак плюс. Так как в данном контуре отсутствуют источники, то в правую часть уравнения записываем ноль. В итоге получаем уравнение: -UL2 +UC3 = 0.
В результате получаем систему уравнений:
С учетом операторных моделей компонентов ( 2 .2):
|
|
(2.4) |
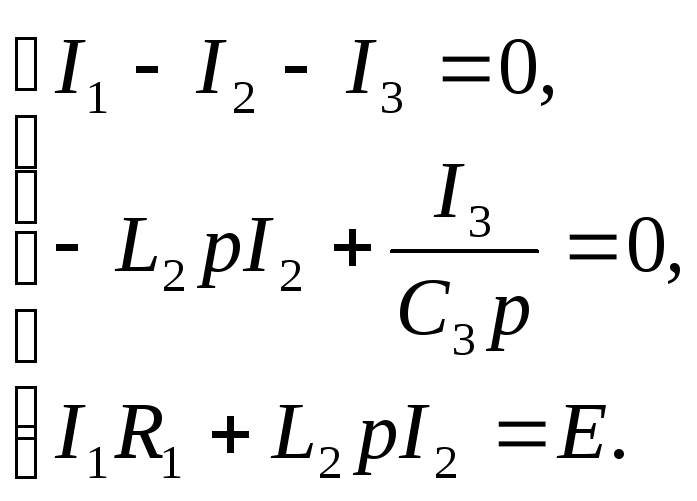
Полученная система уравнений состоит из 3-х уравнений и 3-х неизвестных (I1, I2, I3), следовательно, имеет единственное решение. После нахождения всех токов, можно вычислить падение напряжения на любом компоненте, используя соотношения ( 2 .1) или ( 2 .2).
Обычно в системе имеется вход и выход, тогда для удобства исследования системы выделяют передаточную функцию, показывающую зависимость между входным и выходным сигналами. Для того чтобы получить передаточную функцию, необходимо определить входной и выходной сигналы определить как неизвестные системы уравнений, затем из системы уравнений исключить все неизвестные, кроме входа и выхода.
Пример 2.2
Для схемы (Рисунок 2 .3 – Пример линейной электрической цепи) найти передаточную функцию относительно входа E и выхода UR1.
Решение.
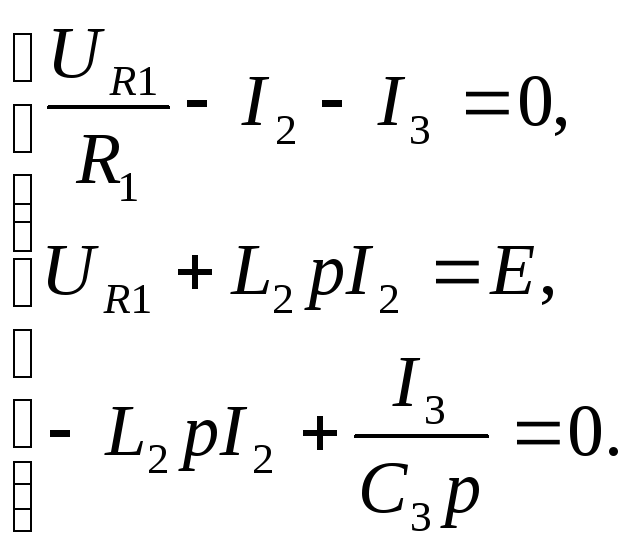
Согласно модели компонента ( 2 .2) UR1=I1R1. Подставив это уравнение в ( 2 .4) получим:
Теперь исключим из системы неизвестные I2 и I3. Например, так: из уравнения 3 выразим I3 и подставим в уравнение 1:
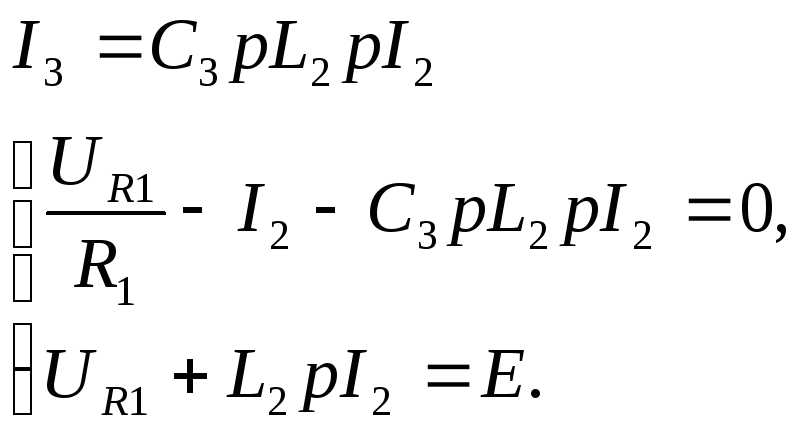
Затем из уравнения 1 выразим I2 и подставим в уравнение 2.

Запишем полученное уравнение в виде UR1=W(p)E:
 .
.
Передаточная функция системы относительно входа E и выхода UR1 равна1:
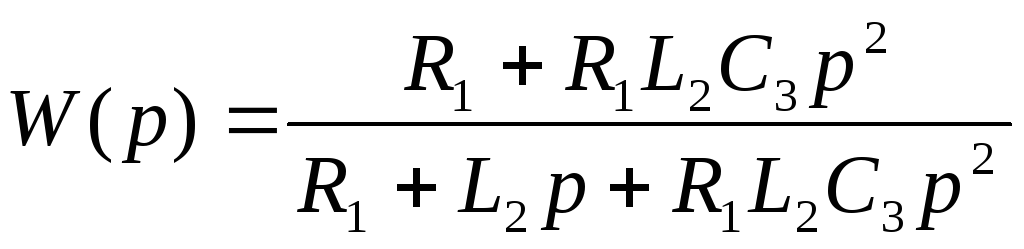 .
.
Три основных вида компонентов линейных систем: звено передаточной функции, сумматор, узел (Рисунок 2 .4 – Виды линейных компонентов структурных схем).
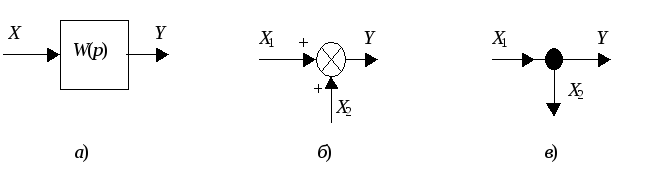
Рисунок 2.4 – Виды линейных компонентов структурных схем