

2.4. Качество линейных систем автоматического управления
Критерии качества разделяются на четыре типа: прямые (определяются по переходному процессу), корневые (определяются по значениям полюсов передаточной функции), частотные (по частотным характеристикам), интегральные (показывают, на сколько близок переходный процесс к идеальному).
Прямые оценки качества: время переходного процесса или время регулирования tрег, определяется из условия ; перерегулирование , определяется по формуле ; время достижения первого максимума tmax (Рисунок 2 .18 – Прямые критерии качества).
|
|
(2.23) (2.24) |
где
![]() – установившееся значение переходного
процесса;
– установившееся значение переходного
процесса;![]() – критерий завершения переходного
процесса, в зависимости от требуемой
точности берут значение (15)%
от величины ступенчатого сигнала на
входе или от значения hу;
hmax
– максимальное значение.
– критерий завершения переходного
процесса, в зависимости от требуемой
точности берут значение (15)%
от величины ступенчатого сигнала на
входе или от значения hу;
hmax
– максимальное значение.
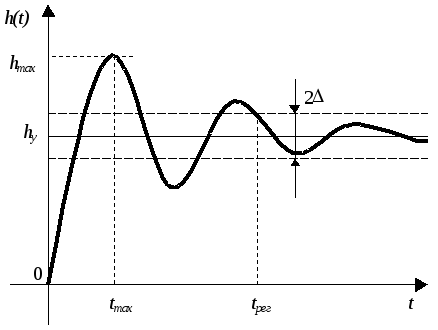
Рисунок 2.18 – Прямые критерии качества
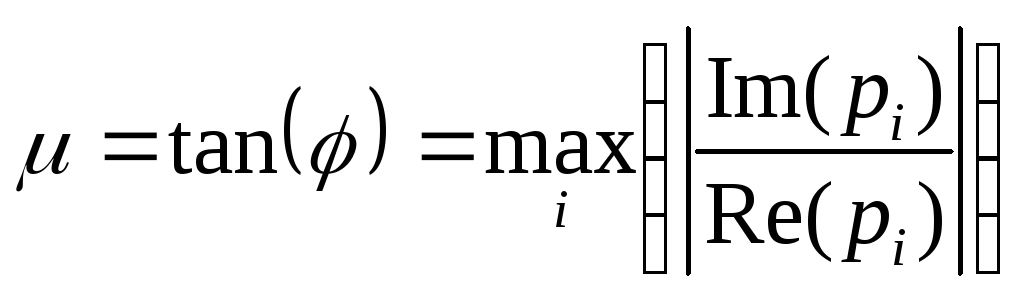
Корневые оценки качества: степень устойчивости системы min; колебательность ; время регулирования tрег. Степень устойчивости определяется как минимальное расстояние полюсов до мнимой оси, оценка имеет смысл только для устойчивых систем, её можно по формуле ( 2 .25). Колебательность показывает на сколько система склонна к колебаниям и определяется по формуле ( 2 .26). Время регулирования для монотонный переходных процессов можно определить по формуле ( 2 .29).Графический смысл оценок показан на Рисунок 2 .19 – Определение корневых оценок качества.
|
|
(2.25)
(2.26)
(2.27) |
 ,
,
где
![]() .
.

Рисунок 2.19 – Определение корневых оценок качества
Частотные оценки качества: колебательность M ( 2 .28), запас устойчивости по модулю L ( 2 .29) и запас устойчивости по фазе ( 2 .30). Определение частотных оценок поясняет Рисунок 2 .20 – Определение частотных оценок.
|
|
(2.28)
(2.29)
(2.30) |
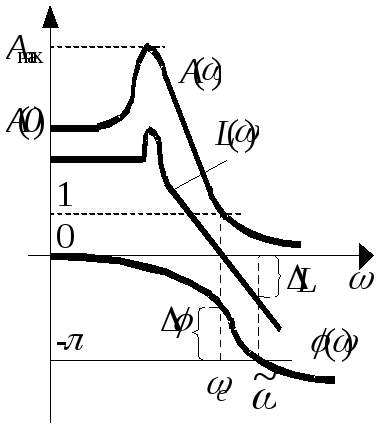
Рисунок 2.20 – Определение частотных оценок
Интегральные оценки. В случае монотонного переходного процесса можно использовать первую интегральную оценку качества ( 2 .31). Если переходный процесс колебательный, то оценка ( 2 .31) даёт заниженный результат Рисунок 2 .21 – Недостатки интегральных оценок I1 и I2, поэтому применяют вторую интегральную оценку ( 2 .32). Для оптимизации системы по быстродействию, использование оценки ( 2 .32) приводит к увеличению перерегулирования Рисунок 2 .21 – Недостатки интегральных оценок I1 и I2, поэтому, для уменьшения перерегулирования можно применить третью интегральную оценку ( 2 .33).
|
|
(2.31)
(2.32)
(2.33) |
где T – параметр, ограничивающий моментальную скорость переходного процесса и как следствие, ограничивает перерегулирование.
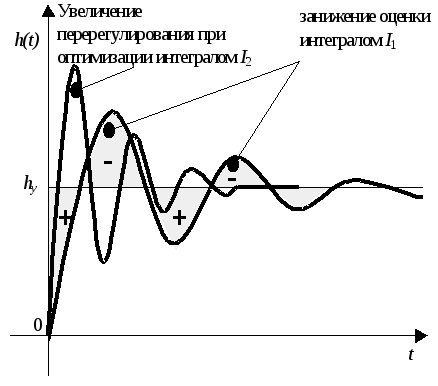
Рисунок 2.21 – Недостатки интегральных оценокI1иI2
2.5. Модели нелинейных систем автоматического управления
2.6. Анализ нелинейных систем автоматического управления
2.7. Модели дискретных систем автоматического управления
2.8. Анализ дискретных систем автоматического управления
Лабораторные работы
3.1. Исследование типовых динамических звеньев
3.2. Устойчивость систем автоматического управления
3.3. Качество систем автоматического управления
3.4. Оптимизация систем автоматического управления
Творческие и дополнительные задания
Список литературы
1Для дальнейшего исследования системы, передаточную функцию записывают в дробно-рациональном виде.
2Далее для краткости передаточные функцииW(p) будем обозначать простоW.
3Формулы приведения ( 2 .17) записаны с учетом, того, что сигнал на выходе не может опережать входной сигнал, т.е. сдвиг фаз не может быть положительным.