

Моторедукторы для стеклоочистителей.
В качестве моторедукторов для стеклоочистителей используются электродвигатели постоянного тока с постоянными магнитами совмещенные с понижающим редуктором. В редукторах обычно используется механизм червячной передачи с дополнительной передачей для преобразования вращательного движения в колебательное.
Законодательные требования по применению моторедукторов для стеклоочистителей допускают эксплуатационную частоту вращения для первой очистки, равную nB1 = 45мин–1 и nB2 = 65мин–1 для второй очистки. Минимальная частота вращения должна составлять nA = 5 мин–1.
В качестве двигателей для стеклоочистителей используются электродвигатели постоянного тока с постоянными магнитами. В системах очистки ветрового стекла обычно используется механизм червячной передачи, в системах очистки заднего окна и фар – дополнительная передача для преобразования вращательного движения в колебательное.
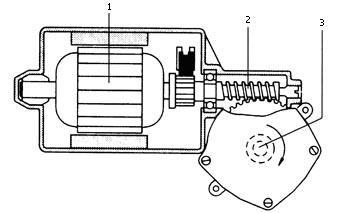
Рис. 10.3. Двигатель стеклоочистителя с червячной передачей.
1 – двигатель постоянного тока с постоянными магнитами,
2 – червячный механизм, 3 – вал.
Фрикционная нагрузка и передаточное число понижающей передачи определяют крутящий момент на выходном валу моторедуктора для установившегося режима работы на мокром стекле, который находится в пределах 20% от начального или пускового момента. В случае больших систем стеклоочистителей ветрового стекла, работающих почти на вертикальных лобовых стеклах (например, на автобусах), крутящий момент рычага стеклоочистителя должен также учитывать влияние силы тяжести.
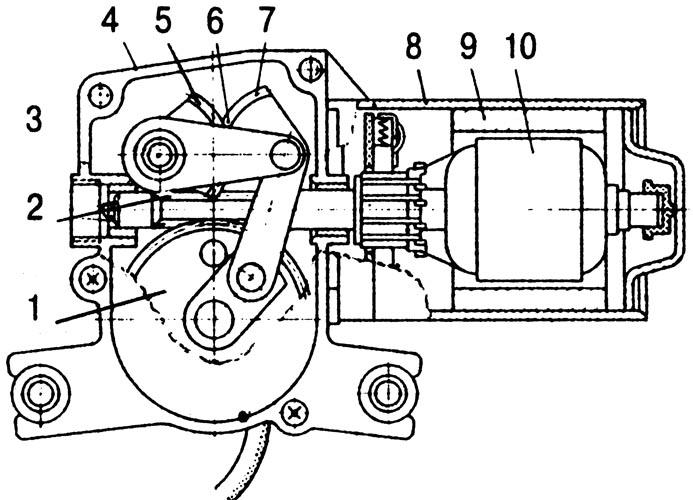
Рис. 10.4. Моторедуктор 47.3730 стеклоочистителя заднего стекла:
1 – шестерня; 2 – червяк; 3 – выходной вал; 4 – корпус
редуктора; 5, 7 – зубчатые сектора; 6 – серьга; 8 – корпус
электродвигателя; 9 – постоянный магнит; 10 – якорь
На рис. 10.4 представлен моторедуктор стеклоочистителя заднего стекла 47.3730. Конструкция моторедуктора определяется конструкцией входящего в него электродвигателя, однако при этом вал электродвигателя удлинен и заканчивается нарезкой червяка редуктора. Стенка корпуса редуктора играет роль передней крышки электродвигателя, щеточный узел расположен со стороны редуктора. Червячное колесо приводит в действие кривошипно–шатунный механизм, состоящий из зубчатых секторов, преобразующий вращательное движение вала двигателя в колебательное движение выходного вала моторедуктора. Зубчатые секторы позволяют расширить угол колебания щеток до 120°.
Система безопасной парковки автомобиля
Парковочный радар (парктроник) — это устройство, измеряющее расстояние между автомобилем и находящимися рядом с ним объектами. Во время движения парковочный радар способен своевременно предупредить водителя о приближении к другому автомобилю (как спереди, так и сзади) либо к крупным предметам, лежащим на земле, а также к малогабаритным объектам и объектам небольшой высоты: столбикам, бордюрам. Это особенно необходимо в темное время суток.
Принцип работы парковочного радара
От двух до восьми врезных или накладных ультразвуковых датчиков, устанавливаемых в задней и передней частях автомобиля, преимущественно на бамперах, контролируют пространство вблизи автомобиля и информируют водителя о приближении к препятствию.
Основными компонентами устройства являются ультразвуковые датчики, блок управления и индикатор. Датчики излучают и принимают отраженный ультразвуковой сигнал, блок управления анализирует полученные данные и выдает на индикатор информацию о возможной опасности. Последние модели датчиков парковки выдают не только пиктограммы, но и точное расстояние и положение препятствия относительно автомобиля.
В момент, когда препятствие обнаружено, парктроник начинает издавать периодический сигнал. По мере приближения к препятствию частота сигнала увеличивается, и он становится непрерывным, когда препятствие находится в непосредственной близости от автомобиля. В то же время на мониторе можно наблюдать расстояние до препятствия и его местоположение.