

2.4. Качество процессов регулирования
Требуемое поведение системы может быть реализовано воздействием на ее входы, на ее внутреннее состояние или на то и другое в различных комбинациях. Само управление реализуется различными способами. Так, например, равенство спроса и предложения на данный товар можно обеспечить изменением его цены, объема производства, дохода потребителей и т.д.
Управление – процесс многовариантный: чем больше степеней свободы имеет объект управления, чем разнообразнее его функции, шире диапазоны его переменных, тем больше множество возможных вариантов управления им. Естественным является стремление выбрать такой вариант, который обеспечивает максимальную эффективность управления, достижение цели наилучшим образом. Эта задача становится разрешимой лишь тогда, когда существуют количественные характеристики, позволяющие объективно сопоставлять результаты управления, достигаемые различными способами. Такие характеристики называют критериями качества или эффективности управления, а при возможности количественной оценки затрат и результатов – критериями оптимальности. Выбор критерия качества управления диктуется назначением системы, целью и условиями ее функционирования и развития. Обычно он задается как функция или функционал входных (выходных) переменных, времени и показателей качества работы системы. Такую функцию часто называют целевой, поскольку она дает количественную меру цели управления.
Каждому варианту управления соответствует определенное значение целевой функции, и задача оптимального управления заключается в том, чтобы найти и реализовать такой вариант управления, при котором целевая функция принимает экстремальное значение при данных конкретных условиях. Так, в управлении цехом может ставиться целью достижение максимального выпуска продукции при заданных ограничениях на ее себестоимость и качество, на производственные мощности, ресурсы сырья, энергии, рабочей силы.
Устойчивость системы управления – необходимое, но далеко не достаточное условие ее работоспособности. Очевидно, что устойчивая СУ при отработке различных воздействий может оказаться недостаточно точной, переходные процессы могут затухать чересчур медленно, не будет обеспечена требуемая плавность изменения выхода.
Комплекс требований, определяющих поведение СУ в установившемся и переходном процессах отработки заданного воздействия, объединяется понятием качества процесса управления (качества системы).
Определение влияния, которое оказывает структура системы и ее параметры на устойчивость и качество СУ относится к задаче анализа системы.
Выбор структуры и параметров СУ в соответствии с требованиями качества, относится к задаче синтеза.
В теории управления к основным показателям качества относят время регулирования, статическую ошибку и величину перерегулирования.
Время регулирования. Время регулирования (tрег) – это время за которое выходная координата y(t) заходит в пятипроцентную трубку от установившегося значения y(∞) и не выходит из нее (рис 6).
Y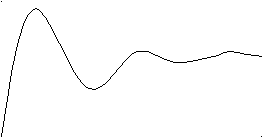
Y2

1.05
y(∞)
y(∞) 0.95 y(∞)




Y1

t
tрег.1
tрег.2
Рис. 6
Здесь и далее для краткости записи принято обозначение:
y(∞) = lim y(t).
t→ ∞
Время регулирования характеризует длительность переходного процесса в динамической системе, т.е. его быстродействие. На рис 6 представлены переходные процессы в двух системах, имеющих разное время регулирования.
Статическая ошибка управления. В устойчивых СУ переходный процесс y (t) с течением времени затухает и наступает установившееся состояние. Как в переходном режиме, так и в установившемся состоянии выходная регулируемая величина y (t) отличается от желаемого характера изменения на некоторую величину ε (t), которая является ошибкой и характеризует точность выполнения поставленных задач. Ошибки в установившемся состоянии ε (∞) определяют статическую точность системы и имеют большое практическое значение.
Статическая ошибка ε (∞) характеризует точность работы системы, т.е. насколько точно исследуемая система обеспечивает желаемое значение yжел на выходе (рис. 7).
ε (∞) = yжел – y(∞)
Y

ymax
σ%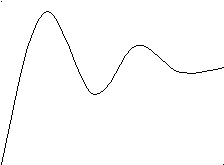



ε (∞)

yжел
у(∞)



ε
(t)
= yжел
–
y(t)
y(t)


t

Рис. 7
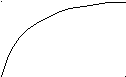
Системы, которые точно отрабатывают желаемое значение yжел и у которых ε (∞) =0, называются астатическими; а системы, в которых ε (∞) ≠0 ― статическими.
Перерегулирование Перерегулирование σ – характеризует меру колебательности процесса в СУ и определяет максимальное отклонение выходной координаты y (t) от установившегося значения, выраженное в относительных единицах или в процентах (рис. 6):
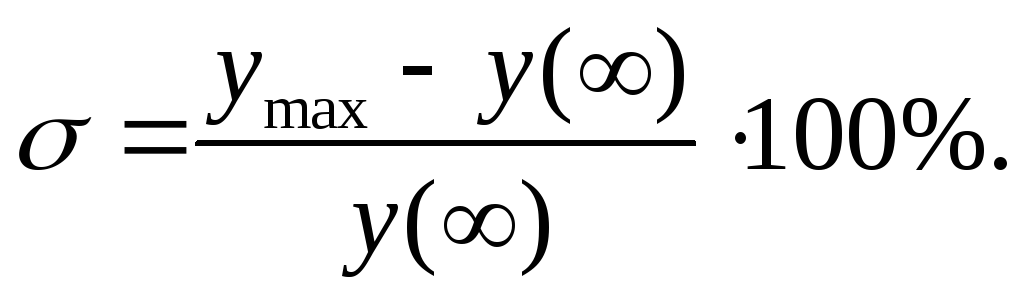
На практике, допустимые значения перерегулирования обычно принимаются в пределах от 0 до 25 %.