

2.4. Двигательная установка на холодном газе
ДУ на холодном газе (азот или гелий) включает:
-систему хранения и подачи холодного газа в сопла;
-микродвигатели газовые.
Система хранения и подачи газа в сопла включает шаробаллон высокого давления (-32 МПа) с газом (см. рисунок), заправочный (КЗ) и предохранительный (ПРК) клапаны, пироклапан с пиропатроном (ПК) для подачи газа в магистрали при включении ДУ, блок (БН) для подачи газа требуемого давления в сопла, штуцера (Ш1, Ш2), микродвигатели газовые, включающие электроклапаны (ЭПК) и сопла (СГ, СК).
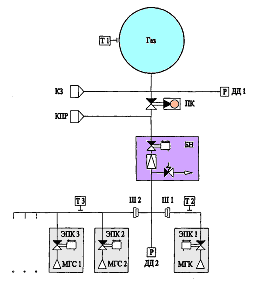
Принципиальная схема ДУ на холодном газе
В качестве микродвигателей газовых могут рассматриваться изделия МД-5 и МД-08, разработки НИИМаш г.НижняяСалда Свердловской области, основные технические характеристики которых приведены в таблице.
Наименование параметра |
Тип микродвигателя |
|
|
МД-5 |
МД-08 |
Тяга, Н |
5,3 |
-0,7 |
Удельный импульс на непрерывном режиме, Н*с/кг • азот • гелий |
687 |
687 1570 |
Давление газа (азота) на входе, МПа |
1,23 |
|
Частота работы в импульсном режиме, Гц |
>10 |
>25 |
Суммарная наработка: • по времени, с • по количеству включений |
3*104 25*104 |
1*104 8*104 |
Масса, кг |
0.35 |
0.1 |
Тема 5. Проектирование системы ориентации и стабилизации (сОиС) ка
Назначение, анализ требований, формирование состава и структуры, их возможных альтернатив. Функционирование системы. Типы датчиков и исполнительных органов СОиС, краткая характеристика и особенности их работы. Выбор основных обобщенных характеристик.
Лекция 14-17.
Системы ориентации и стабилизации КА принято классифицировать на пассивные, полупассивные, полуактивные, активные и комбинированные.
Пассивные системы.
Пассивные системы используют в качестве управляющих моментов только внешние силы. При этом бортовые источники энергии, датчики и логическая схема системы управления отсутствуют. Наибольшее применение на практике нашли пассивные системы, в основу работы которых положены следующие принципы: стабилизация вращением, гравитационная стабилизация, стабилизация с помощью сил давления солнечного излучения, аэродинамическая, магнитная стабилизация и их комбинации.
Существуют следующие основные типы пассивных систем:
-системы стабилизации вращением, не обладающие способностью управления скоростью вращения КА, его переориентацией, прецессией оси вращения и используемые для инерциальной ориентации оси вращения при условии, что накопленные в течение всего срока активного существования спутника (САС) ошибки ориентации не превышают допустимые;
-гравитационные системы с демпфированием, обеспечивающие ориентацию КА по местной вертикали со средней точностью порядка 5°-10°;
-системы с ориентацией солнечных батарей и демпфированием, используемые для ориентации на Солнце со средней точностью порядка нескольких градусов;
-аэродинамические системы с ориентацией аэродинамических рулей и демпфированием, используемые для ориентации вектора линейной скорости КА со средней точностью не выше нескольких градусов;
-магнитные системы с демпфированием, используемые для ориентации КА вдоль вектора напряженности геомагнитного поля с точностью порядка 1-3°. Комбинированными пассивными системами являются гравитационно-магнитные, гравитационно-солнечные, гравитационно-аэродинамические, и т.п. системы.
Полупассивные системы.
Полупассивные системы не содержат датчиков ориентации, в качестве основного источника управляющих моментов используют внешние силы, а бортовая энергия используется незначительно. Примеры используемых на практике полупассивных систем:
-системы гравитационной стабилизации с постоянным демпфированием и постоянным кинетическим моментом гироскопов по оси тангажа для увеличения восстанавливающих моментов спутника по крену и рысканию;
-системы инерциальной стабилизации с помощью маховиков с использованием сил давления солнечного излучения, предназначенные для двухосной ориентации на Солнце;
-системы аэродинамической стабилизации с маховиком, управляющим углом тангажа, используемые для трехосной ориентации.
Из комбинированных полупассивных систем можно назвать системы аэродинамической и гравитационной стабилизации с маховиками или гироскопами, осуществляющие двух и трех осную стабилизацию КА.
Полуактивные системы.
В полуактивных системах применяются датчики ориентации, но не по всем каналам управления. По одним каналам для управления могут использоваться моменты взаимодействия исполнительных органов спутника с внешними силами, а по другим реактивные двигатели или внутренние моменты. К полуактивным системам относятся:
-системы стабилизации вращением, обеспечивающие возможность переориентации, управления прецессией и скоростью собственного вращения;
-системы стабилизации вращением, управление которыми осуществляется либо магнитной либо реактивной системой;
-системы стабилизации вращением, с использованием гравитационного момента для управления вектором кинетического момента КА.
Активные системы.
В активных системах применяются датчики ориентации для всех управляемых степеней свободы. Управление производится с использованием моментов сил тяги реактивных двигателей или моментов внешних сил, а также, если это экономично, с использованием управляющих моментов, обусловленных внутренними источниками. Для повышения экономической и технической эффективности активных систем применяются различные логические устройства.
К активным системам можно отнести:
-системы трехосной стабилизации, использующие маховики или реактивные двигатели для накопления момента и магнитные или гравитационные устройства для моментной разгрузки маховиков;
-системы трехосной стабилизации с помощью реактивных двигателей;
-системы трехосной стабилизации, использующие моментные гироскопы для накопления момента и реактивные двигатели или магнитные и гравитационные устройства для моментной разгрузки гироскопов.
Комбинированные системы.
Комбинированные, или гибридные, системы имеют число управляемых степеней свободы боле трех и представляют собой различные комбинации рассмотренных выше систем. Первые КА имели пассивные системы стабилизации вращением. В дальнейшем основное внимание уделялось активным и комбинированным системам трехосной стабилизации и управления. Трудности, возникшие при их реализации, привели к созданию сравнительно простых пассивных, полупассивных и полуактивных систем.
Далее рассмотрим СОиС на примере активной системы.