

1 Предварительный расчет I
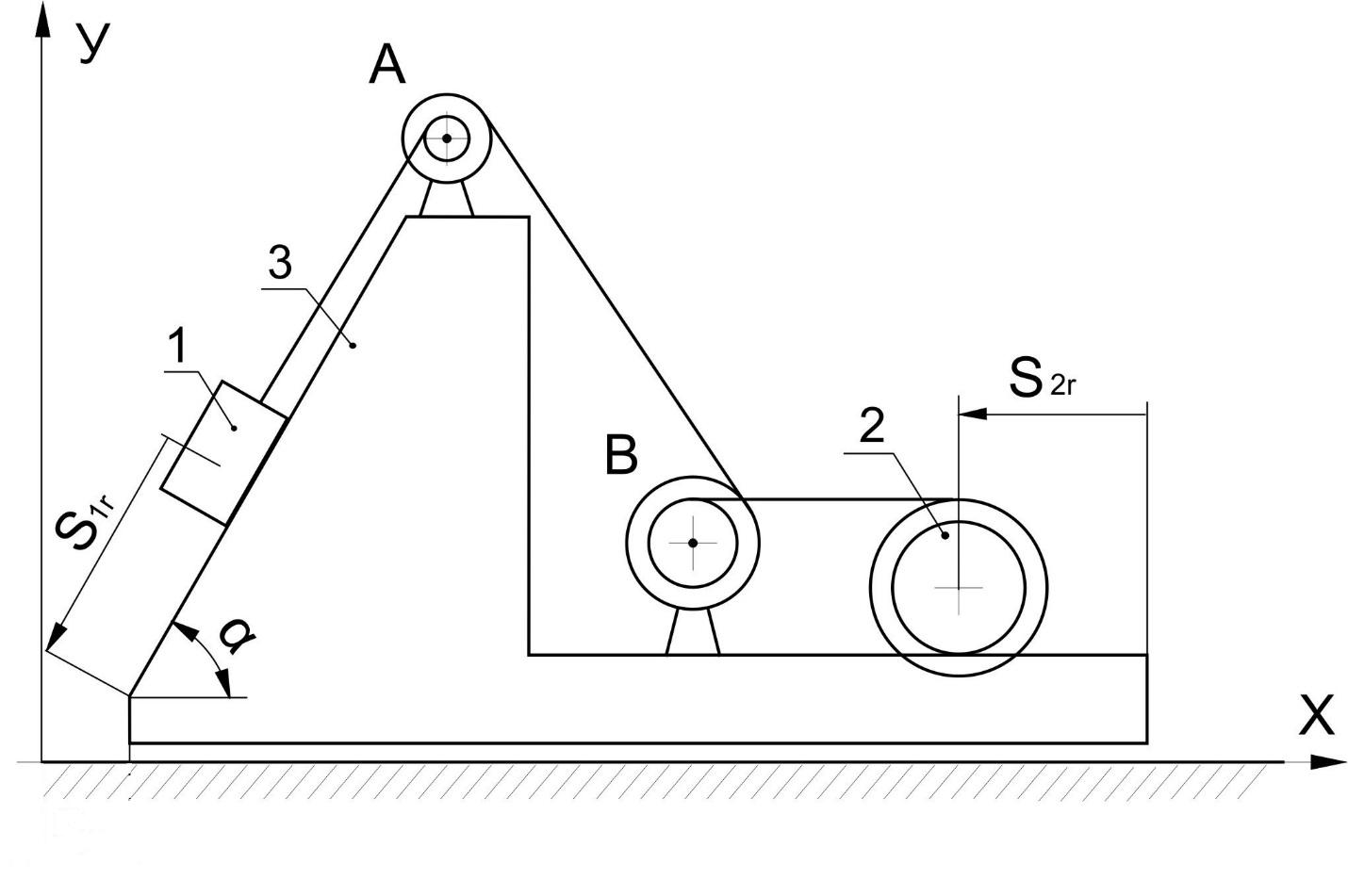
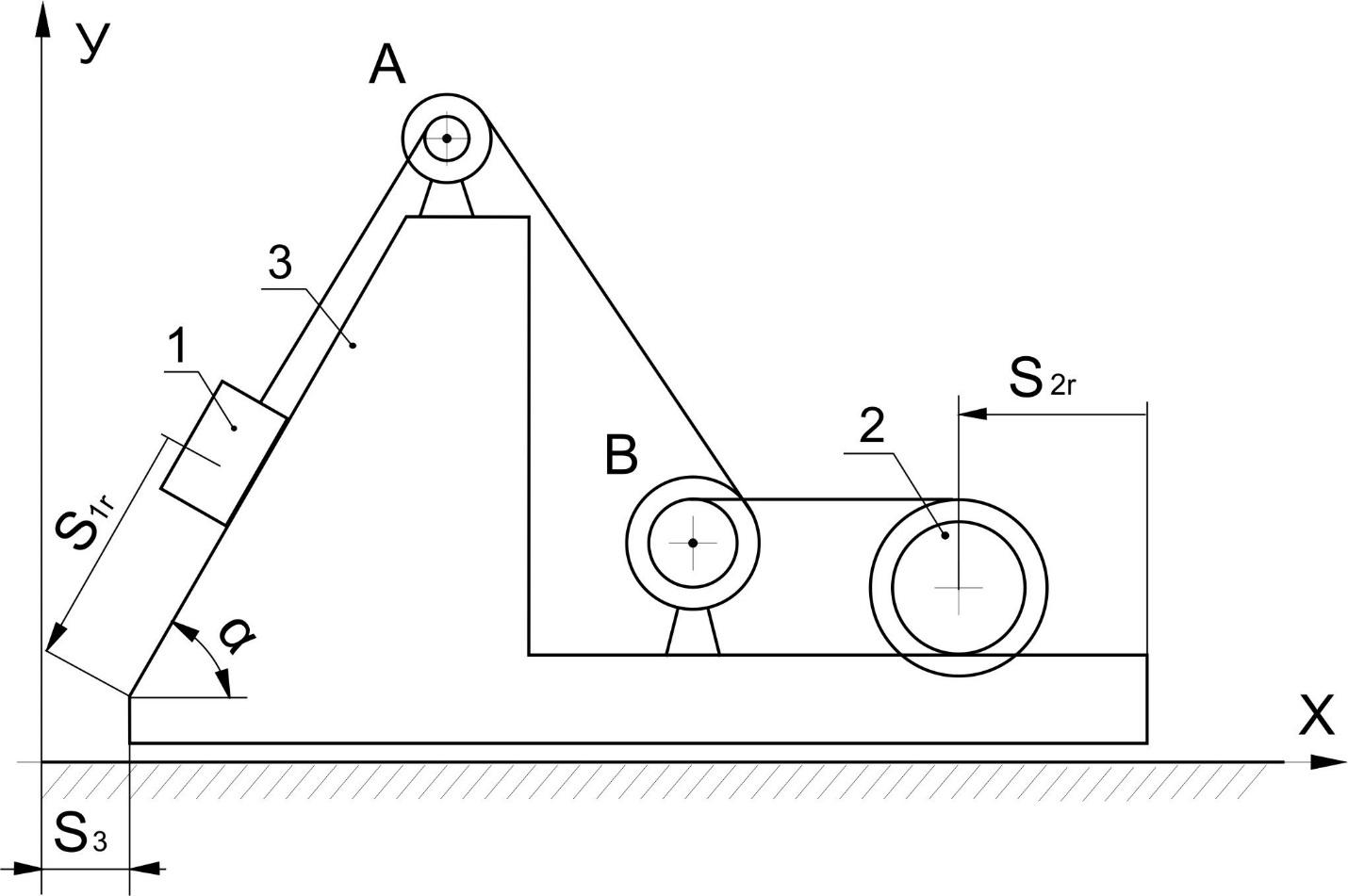
Определить направление движения системы тел 1 и 2 относительно призмы 3. Для этого составить уравнения равновесия (условно считая их находящимися в равновесии на неподвижной призме 3) тел 1, 2 и блока А и блока В. Из этих уравнений определить силы натяжения нитей и по сумме моментов этих сил относительно оси вращения одного из блоков А (или В) определить направление вращения этого блока. Для катящегося без скольжения катка уравнение условного равновесия составлять в виде суммы моментов относительно точки его соприкосновения с поверхностью призмы 3; трением качения на данном этапе можно пренебречь.
|
кг |
кг |
кг |
кг |
кг |
м |
м |
м |
м |
м |
м |
|
F Н |
M Н |
|
200 |
300 |
400 |
50 |
100 |
2 |
1 |
3 |
2 |
4 |
3 |
60 |
1000 |
7000 |













Составим уравнения равновесия (условно считая тела находящимися в равновесии на неподвижной призме 3) тел1,2, блокаАи блокаВ. Из этих уравнений определим силы натяжения нитей, и по сумме моментов этих сил, относительно оси вращения одного из блоков, (А или В) определим направление вращения этого блока. Для катящегося без скольжения катка уравнение условного равновесия составим в виде суммы моментов относительно точки его соприкосновения с поверхностью призмы3;
Тело 2 :
∑mcv=0;



 .
.
Tело 1 :



∑Y=0,


Блоки А и В : |T1|=|T’1|, |T2|=| T’2|, |TB|=| T’B|;
∑mB
=
0,
 ;
;
 ;
;
Сумма моментов для Блока А :
 ˃0 => тело 1 движется
вниз, тело 2 движется влево
˃0 => тело 1 движется
вниз, тело 2 движется влево
2 Теорема о движении центра масс
Определив, в каком направлении будут перемещаться тела 1 и 2, составить уравнения кинематических связей, то ест уравнения, связывающие между собой относительные (по отношению к призме 3) линейные скорости центров масс тел 1 и 2 системы и угловые скорости блоков A и B, а также катка 2, совершающего плоскопараллельное движение. Обозначить относительное перемещение тела 1 как S1r,, найти через него, используя уравнения кинематических связей, относительное перемещение S2r тела 2. Затем с помощью закона сохранения движения центра масс, записанному в проекциях на горизонтальную ось Ox, найти абсолютное перемещение S3 тела 3 по идеально гладкой горизонтальной поверхности, выразив его как функцию S1r .
 Доп.
возьмем точку D
на ободе большего радиуса катка 2.
Скорость, а, следовательно, и направление
движения будет совпадать со скоростью
катка 2.
Доп.
возьмем точку D
на ободе большего радиуса катка 2.
Скорость, а, следовательно, и направление
движения будет совпадать со скоростью
катка 2.
Зададимся V1r.
Составим уравнения кинематических связей:
 ;
;
 ;
;
 ;
;

 ;
;
 ;
;
Зададим
перемещение тела 1 = S1r,
и через него выразим S2r,
 ,
, ,
, :
:
 ;
;
 ;
;
 ;
;
 ;
;
 Дифференцируя
скорости по времени получим выражения
для ускорений тел.
Дифференцируя
скорости по времени получим выражения
для ускорений тел.





По полученным данным составим таблицу:
|
|
Ускорения |
Скорости |
Перемещения |
|
Тело 1 |
|
|
|
|
Блок А |
|
|
|
|
Блок В |
|
|
|
|
Тело 2 (вращ.) |
|
|
|
|
Тело 2 (лин.) |
|
|
|














 Теорема
о движении центра масс.
Теорема
о движении центра масс.

Проинтегрируем дважды по времени:

Так
как:
 =0 (2.1)
=0 (2.1)
Следовательно:
 =>
=> =0
=>
=0
=>
Обозначим:
 ,
, =
= ,
, =
(
=
( +
+ +
+ )
)
 =
=

 (2.2)
(2.2)
При
t=0:
 )
)


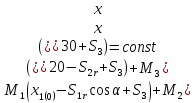
Подставив в (2.2):
 (2.3)
(2.3)
 При
некотором t:
При
некотором t:



Подставив в (2.2):
 (2.4)
(2.4)
Приравняв (2.3) и (2.4), получим:
(
 )
) =
= (2.5)
(2.5)
Решив уравнение (2.5):
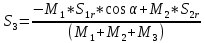 (2.6)
(2.6)
Подставив
числовые значения в (2.6) для
 ,
получим:
,
получим:
 0,26*
0,26*