

8.2. Микропроцессоры
Микропроцессор (МП) – это информационное устройство, которое по программе, задаваемой управляющими сигналами, обрабатывает информацию, т. е. реализует операции: арифметические, логические, ввода, вывода и т. д.
Микропроцессор реализуется в виде одной или нескольких микросхем высокой степени интеграции и обладает меньшими функциональными возможностями, чем процессор ЭВМ.
Микропроцессор применяется совместно с микроэлектронными элементами:
– запоминающим устройством программы (ЗУП);
– запоминающим устройством данных (ЗУД);
– устройством ввода – вывода (УВВ).
Система, состоящая из микропроцессора и указанных устройств, называется микропроцессорной системой (микроЭВМ).
Общая функциональная схема системы с микропроцессором показана на рис. 70.
Эта система содержит следующие функциональные элементы:
ЗУП – осуществляет хранение команд, составляющих программу микропроцессора, причём информация, записанная в нём не теряется при перерывах в напряжении питания.
ЗУД – осуществляет хранение данных, предназначенных для обработки микропроцессором.
УВВ – обеспечивает ввод данных в ЗУД и их вывод к внешним приборам и устройствам.
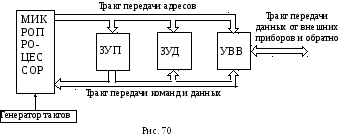
Генератор тактов осуществляет функционирование всех узлов и блоков микропроцессорной системы. Устойство управления при помощи генератора тактовых сигналов обеспечивает требуемую последовательность работы элементов для выполнения команды.
Блоки микропроцессорной системы связаны трактом передачи адресов для выборки микропроцессором команд из ЗУП и данных из ЗУД или УВВ, а также трактом передачи команд из ЗУП в микропроцессор и данных из ЗУД или УВВ в микропроцессор и от него.
Оба тракта передачи информации состоят из некоторого количества проводников, каждый из которых может подключаться к соответствующим приемникам и источникам микропроцессорной системы, осуществляя многократное использование каждого проводника для создания связи между узлами блоков всей системы.
Это достигается устройством управления микропроцессора, осуществляющим разделение во времени соответствующих связей (мультиплексирование). Тракт передачи информации можно сравнить с двусторонней транспортной магистралью, предназначенной для доставки пассажиров в требуемые пункты назначения.
Система с микропроцессором оперирует информацией в двоичной системе исчисления (1–0). Каждый разряд двоичного числа называется битом. Например число 1110 – четырёхбитовое двоичное число, а число 110 – трёхбитовое. Крайний слева бит имеет наибольший вес, крайний справа – наименьший (соответственно старший бит и младший).
Информация, которую обрабатывает микропроцессор, представляется группой битов, составляющих слово. Количество битов в слове зависит от типа микропроцессора.
Наиболее распространённые слова составляют длину 4, 8, 12, 16 бит. Количеством битов в слове определяется число разрядов приемных регистров, входящих в сверхоперативную память микропроцессора.
Биты, образующие слово, подразделяются на группы; группа из 8 бит называется байтом.
Деление слова на байты позволяет упростить представление двоичного слова, применив шестнадцатиричную форму записи (шестнадцатиричный код).
Представление двоичного слова в шестнадцатиричном коде позволяет уменьшить вероятность появления ошибок при составлении программы работы микропроцессора, а также упростить технику ее трансляции.
Микропроцессор – сложное цифровое устройство, состоящее из множества функциональных узлов.
Независимо от типа микропроцессора можно выделить отдельные функциональные узлы, составляющие основу его построения:
– счётчик команд – содержит адрес команды из ЗУП в текущий момент времени;
– регистр команд – осуществляет хранение в микропроцессоре команды, считанной с ЗУП на период её выполнения;
– формирователь адресов операндов – один или несколько регистров, в которых составляется адрес данных (операнда) перед обращением в ЗУД;
– АЛУ(арифметическо-логическое устройство) – осуществляет операции сложения, вычитания, сравнения, операции И, ИЛИ, над двумя числами (операндами) с выдачей результата по одному выходу;
– аккумулятор – основной регистр служит для ввода данных в микропроцессор и вывода их от него. В аккумулятор поступает операнд из ЗУД перед проведением соответствующей операции в АЛУ. В аккумулятор вводится результат проведённой в АЛУ операции;
– регистры сверхоперативной памяти – служат для временного хранения данных перед проведением операций в АЛУ.
Если, например, требуется провести операцию сложения двух чисел, то одно число предварительно хранится в аккумуляторе, а второе – в одном из регистров сверхоперативной памяти.
У большинства микропроцессоров количество регистров сверхоперативной памяти равно 6.
К началу выполнения программы микропроцессор должен находиться в исходном состоянии – для этого подаётся сигнал «установка нуля», которым все регистры микропроцессора, в том числе счетчик команд, устанавливаются в исходное нулевое состояние.