

11.5.2. Рабочие характеристики ад
Рабочие характеристики двигателя – это зависимость его эксплуатационных параметров от мощности на валу P2 (полезной мощности). К эксплуатационным параметрам относятся: n2 – частота вращения двигателя (ротора); cos 1 – коэффициент мощности двигателя; – коэффициент полезного действия (КПД) двигателя; Mвр – момент вращения двигателя; I1 – ток в обмотке статора; s – скольжение двигателя.
Рабочие характеристики снимаются при постоянном напряжении питания статорной обмотки и постоянной частоте тока в сети (U1 = const, f = const). Они показаны на рис. 89.
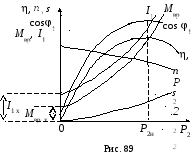
Зависимость тока статорной обмотки от полезной мощности на валу I1 = f (P2). По мере роста нагрузки на валу увеличивается ток статора за счет увеличения его активной составляющей. В режиме холостого хода, когда момент практически равен нулю, ток равен току холостого хода I1х, значение которого зависит от магнитного сопротивления магнитопровода и, в первую очередь, от сопротивления воздушного зазора между статором и ротором, поэтому зазор делается небольшим – десятые доли мм, тем не менее I1х (0,20,5) I1н в зависимости от мощности АД.
Зависимость коэффициента мощности АД oт полезной мощности cos 1 = f (P2). При холостом ходе cos 1 определяется мощностью потерь в магнитопроводе, обычно в этом режиме cos 1 достаточно мал (0,20,3), поэтому длительная работа АД без нагрузки нежелательна. Однако при нагрузке, близкой к номинальной, рост cos замедляется вследствие увеличения реактивной мощности полей рассеяния. Обычно при номинальном режиме АД cos 1 равен 0,70,85.
Зависимость частоты вращения ротора от полезной мощности n2 = f (P2). Эта характеристика достаточно жесткая и мало отличается от механической характеристики двигателя.
Зависимость коэффициента полезного действия АД от полезной мощности = f (P2) выражается формулой
![]() ,
,
где P2 – полезная мощность, P1 – мощность, подводимая к статорной обмотке (затраченная мощность), Pмагн – потери в стали статора, Pэл –электрические потери в меди обмоток, Pмех – механические потери, обусловленные трением в подшипниках, несоосностью ротора и статора и др. При отсутствии нагрузки = 0, с увеличением P2 – коэффициент полезного действия увеличивается, однако, при больших нагрузках рост замедляется, затем начинает уменьшаться за счет увеличения тепловых потерь в обмотках, пропорциональных квадрату токов в них. Асинхронные двигатели рассчитывают так, чтобы максимальный находился в пределах (0,70,8 )P2ном.
Зависимость
вращающего момента АД от полезной
мощности
M
= f (P2).
Вращающий момент складывается из
полезного момента
M2
и момента холостого хода Mвр.х,
последний затрачивается на
покрытие механических потерь, его можно
считать постоянным и
не зависящим от нагрузки двигателя.
Полезный момент
![]() ,
где р
– угловая частота ротора, которая
уменьшается с увеличением полезной
мощности P2,
поэтому кривая момента – нелинейная
и характеристика М
= f (P2)
несколько отклоняется вверх.
,
где р
– угловая частота ротора, которая
уменьшается с увеличением полезной
мощности P2,
поэтому кривая момента – нелинейная
и характеристика М
= f (P2)
несколько отклоняется вверх.
Зависимость скольжения АД от полезной мощности s = f (P2). Скольжение s ротора связано с n2 следующим образом:
![]()
При холостом ходе, когда P2 = 0, n2 n1 скольжение мало oтличается от нуля. С увеличением полезной мощности частота вращения ротора несколько уменьшается, а скольжение увеличивается. При P2 = P2н скольжение s = 0,030,06.