

УЧЕБНИК САРП100
.pdfD (τи)=C τи /2,
где С – скорость распространения радиоволн. Если D (м), С(м/с), τи (мкс), то получим
D(τи)=150τи.
На малых дальностях длительность импульсов τи<1мкс. Можно считать, что время восстановления чувствительности приемника tв≈τи.
Тогда минимальная дальность РЛС будет получена в виде:
Dmin ≈ 300τи. |
(1.2) |
1.4. Мертвая зона РЛС
Радиус мертвой зоны, окружающей судно, зависит от высоты установки антенны h1 и ширины диаграммы направленности антенны в вертикальной плоскости θ1 в непосредственной близости от антенны.
Как следует из рис. 1.2, радиус мертвой зоны, численно равный дистанции, в пределах которой прием сигналов невозможен, определяется величиной:
Dмз = |
h1 |
. |
(1.3) |
||
|
|||||
|
tg |
θ1 |
|
|
|
2 |
|
|
|
||
|
|
|
|
|
|
Рис. 1.2
Здесь θ1 – ширина луча антенны в вертикальной плоскости у основания луча. Ширину луча антенны в вертикальной плос-
11

кости принято определять величиной θ, замеренной на уровне половинной излучаемой мощности. Ширина луча у основания
луча θ1 ≥ θ. Справедливо θ1 ≥ 3θ . Если θ = 25o , то θ1≥ 75o. Для h1 =15м получим
Dм.з = tg3715,5o =19,5м .
1.5. Разрешающая способность РЛС
Разрешающая способность по дальности
Разрешающая способность по дальности оценивается расстоянием D между двумя раздельно наблюдаемыми целями 1 и 2, расположенными на одном направлении относительно РЛС (рис. 1.3).
Рис. 1.3
Раздельный прием отраженных сигналов от этих целей возможен, если отраженный импульс от первой цели закончится раньше, чем будет принят импульс, отраженный от второй цели.
Поскольку отражение от первой цели длится в течение времени τи, а сигнал от второй цели запаздывает на время t=2 D /C, то условием раздельного приема сигналов будет неравенст-
во |
2 D |
≥τи . |
|
|
|
||
|
C |
|
|
|
Раздельное отображение двух целей на экране РЛС будет, |
||
если расстояние между целями |
|
||
|
|
D≥Сτи/2. |
(1.4) |
|
Считается, что с уменьшением |
D величина разрешающей |
|
способности по дальности возрастает. Таким образом, для уве12

личения разрешающей способности по дальности следует уменьшать длительность зондирующих импульсов.
Разрешающая способность по азимуту(по направлению)
Разрешающая способность по азимуту оценивается минимальной величиной угла αо между направлениями на две равноудаленные точечные цели 1 и 2 (рис. 1.4), при котором отраженные сигналы от этих целей принимаются раздельно.
Рис. 1.4
Величина разрешающей способности по азимуту αо определяется шириной диаграммы направленности антенны по горизонтали αг на уровне половинной мощности.
Таким образом, для повышения разрешающей способности по азимуту следует сужать диаграмму направленности антенны по азимуту.
Разрешающая площадь
Разрешающая площадь на удалении D оценивается величиной площади, ограниченной по азимуту шириной луча αг антенны на уровне половинной мощности, а по дальности – разрешением по дальности (рис. 1.5). Следует отметить, что разрешающая способность по дальности из-за конечного угла скольжения β в 1/cosβ раз больше общепринятой величины
Cτи/2.
Угол скольжения – это угол в вертикальной плоскости между направлением максимума излучения с выхода антенны РЛС и поверхностью моря.
Величина разрешающей площади
13
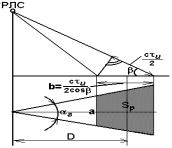
Sр = |
DαгСτи |
= 0,0087 |
DαгСτи |
. |
57,3 2cos β |
|
|||
|
|
cos β |
||
Для малых значений β справедливо
Sр = 0,0087DαгСτи .
Расчетное выражение для разрешающей площади
S р = |
Dαг150Сτи |
≈ 2,6Dαгτи , |
(1.5) |
|
57,3 |
||||
|
|
|
где αг (град); τи (мкс); D (м); SР (м2).
В пределах разрешающей площади точечные цели раздельно отображаться на экране РЛС не могут.
Если D = 50 103 м; αг = 1o; τи = 1 мкс, то Sр = 13 104 м2.
Рис. 1.5
Разрешающий объем
Разрешающий объем на удалении D оценивается величиной объема, численно равного площади сечения луча антенны на этом удалении, умноженной на величину разрешения по дальности Cτи/2 (рис. 1.6).
Получим:
V = D2 |
αгθ |
|
Сτи |
=1,5 10−4 |
D2αгθСτи . |
|
57,3 57,3 |
2 |
|||||
|
|
|
||||
|
|
|
14 |
|
||

Расчетная формула для разрешающего объема
V = D2 |
αгθ |
|
150τи = 0,045D2αгθτи , |
(1.6) |
|
57,3 57,3 |
|||||
|
|
|
|||
где V(м3); D(м); α (град); θ(град); τи(мкс).
Рис. 1.6
Если D = 50 103 м; αг= 1o; τи= 1 мкс; θ = 20o, то V = 225 107 м3.
1.6. Погрешности измерений навигационных параметров
Перечень навигационных параметров цели приведен в главе VII. Измеряемыми параметрами цели являются дистанция до цели Dц, азимут на цель αц, скорость движения цели υц.
Остальные параметры цели определяются расчетным путем. Погрешность измерения параметра зависит от инструментальных и шумовых погрешностей.
Инструментальные погрешности в цифровых РЛС зависят от выбранного дискрета измерения дальности, от разрядности преобразователя угол-код для съема угла поворота антенны, от разрешающей способности ЭЛТ, от степени оптимальности используемых алгоритмов работы систем обнаружения целей и измерения параметров целей.
Результирующие погрешности измерений зависят, в первую очередь от воздействия судовых радиолокационных станций, от уровня собственных шумов приемника, дополнительных шумов из-за переотражений от взволнованной морской поверхности, от гидрометеоров, от воздействия взаимных помех,.
Анализ погрешностей измерений приведен в главе VI.
15
1.7. Двухлучевая модель распространения зондирующих сигналов над морской поверхностью
При зеркальной поверхности моря зондирующий сигнал, отражаясь от морской поверхности, достигает цели так же, как и прямой сигнал. Поэтому принято говорить о так называемой двухлучевой модели распространения радиоволн.
Первый луч РЛС – цель называется прямым, второй луч РЛС – поверхность моря – цель называется переотраженным. Разность фаз высокочастотного заполнения зондирующих сигналов обоих лучей зависит от высоты антенны, высоты цели, расстояния до цели, угла скольжения луча.
Вследствие векторного сложения диаграмма рассеяния в вертикальной плоскости расщепляется на узкие интерференционные лепестки. Напряженность поля при гладкой морской поверхности в максимуме лепестков удваивается, в минимуме
– доходит до нуля. При шероховатой морской поверхности глубина минимумов уменьшается, а максимумы сглаживаются.
Эффект двухлучевости может привести к пропаданию или ослаблению сигналов от целей на ряде обзоров РЛС на определенных дальностях, что затрудняет сопровождение объектов.
В других случаях, напротив, из-за эффекта двухлучевости возможно обнаружение целей на предельных дистанциях (см. главу II).
Если поверхность моря не зеркальна, то в сигнале, переотраженном морской поверхностью, помимо зеркальной (когерентной) составляющей, присутствует еще и диффузная составляющая. Средний уровень диффузной составляющей составляет около 40% от уровня сигнала, соответствующего прямому лучу. Распределение вероятностей огибающей двухлучевого сигнала, отраженного от точечной цели, подчиняется обобщенному закону Релея.
1.8. Потенциально достижимая дальность обнаружения целей с учетом рефракции и приводных волноводов
Электромагнитные волны распространяются в вакууме со скоростью
16

C = |
|
1 |
|
|
|
|
≈ 3 10 |
8 м/ с, |
(1.7) |
||||
|
μoεo |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||
где магнитная проницаемость |
μo = |
4π 10−7 Гн/ м; |
диэлек- |
||||||||||
трическая проницаемость ε |
о |
= |
1 |
|
|
Ф |
. |
|
|||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
4π 9 109 м |
|
||||||
Для среды с относительными значениями μ и ε скорость |
|||||||||||||
распространения энергии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ = |
|
C |
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
με |
|
|
|
|
|
|
Все виды земной поверхности являются немагнитными, поэтому для поверхностной волны μ =1.
В реальной Земной атмосфере скорость распространения радиоволн υ меньше, чем в свободном пространстве, и зависит от показателя преломления n:
υ = |
C |
= |
|
C |
, |
(1.8) |
ε |
|
n |
||||
|
|
|
|
|
||
где ε – диэлектрическая |
|
проницаемость |
атмосферы, |
|||
С = 299792456,2±1,1 м/с – точное значение скорости распространения радиоволн в вакууме.
Величина n несколько больше единицы, поэтому
υ = |
|
|
C |
|
≈C(1 − n), |
|
1 |
+ |
n |
||||
|
|
|||||
где n = n −1 – коэффициент преломления.
Без учета влияния рефракции земной поверхности луч распространяется в пределах прямой видимости.
В этом случае предельная дальность прямой видимости ограничивается кривизной Земли и ее можно определить, обращаясь к рис. 1.7.
17

Рис. 1.7
Высоту передающей и приемной антенн обозначим H1 и H2, радиус Земли R = 6368 км.
Предельное расстояние прямой видимости D определяется выражением:
D =r1 +r2 =
(R+H )2 −R2 + (R+H )2 −R2 = 2RH +H2 + 2RH +H2 .
1 2 1 1 2 2
Учитывая, что H1«R и H2«R, получим:
D(км)= 3,57( H1 (м)+
H1 (м)+  H 2 (м)).
H 2 (м)).
В реальной атмосфере при определении предельного расстояния необходимо учитывать показатели преломления.
Зависимость коэффициента преломления от параметров атмосферы дается в виде эмпирической формулы
(n −1) 10 |
|
77,6 |
|
|
|
4810P |
|
|
2 = |
|
P |
+ P + |
1 |
, |
|||
Т |
Т |
|||||||
|
|
|
0 |
1 |
|
|||
гдеТ– температура(К),
P0, P1 – давление воздуха и паров воды в мегапаскалях (МПа).
Вметрологии1 бар= 0,1 МПа= 760 мм. рт. ст.
18

Для атмосферы Земли температура, влажность и давление обычно падают с высотой.
Если произвести усреднение измерений за большой промежуток времени, то получим данные для так называемой стандартной атмосферы.
Экспериментально для стандартной атмосферы найдено среднее значение коэффициента преломления:
(n −1) 106 = 313exp(− 0,134H ),
где H – высота (км).
Показатель преломления n уменьшается с высотой. Для стандартной атмосферы вертикальный градиент
gn = dHdn = −4 10−8 м1 .
С ростом высоты скорость распространения радиоволн возрастает, за счет чего происходит искривление фронта волны - радиолуч отклоняется от прямой линии вниз, огибая поверхность Земли. В этом случае говорят о положительной рефракции. Влияние положительной рефракции на дальность радиоканала обычно учитывают, заменяя действительный радиус Земли (R3 = 6368 км) на эффективный радиус Земли R3 = 4 / 3Rз = 8460км. При использовании эффективного ра-
диуса Земли считается, что радиоволны распространяются прямолинейно с постоянной скоростью над Землей с большим диаметром. Дальность прямой видимости при использовании радиогоризонта при эффективном радиусе Земли с учетом рефракции определяется с помощью выражения:
Dрг (км) = 4,15( H1 (м) + H 2 (м) ). |
(1.8) |
Дальность действия возрастает на 16% по сравнению с прямой видимостью. В пересчете на морские мили получим:
Dрг (м.м.) = 2,22( H1 (м) + H 2 (м) ). (1.9)
19

Если H1 = H2 = 15 м (типовая высота для антенн судовых РЛС), то Dрг = 17 м.м.
Реальная дальность РЛС достигает до 120 м.м., что объясняется случаями повышенной рефракции, сверхрефракции, влияния приводных волноводов, большими высотами береговой черты.
Если Rэ> 8460 км, то говорят о повышенной рефракции, если Rэ<8460 км, то имеет место пониженная рефракция.
При достижении градиентом dndh значения – 0,157 10-8 1/м
эффективный радиус Земли стремится к бесконечности – это случай критической рефракции типа «плоская Земля».
Для больших градиентов концепция эффективного радиуса Земли теряет свой смысл. Если dndh >0, то имеет место отрица-
тельная рефракция: радиоволна отклоняется от поверхности Земли.
Вряде случаев в высотном профиле нарушается обычный ход изменения показателя преломления в зависимости от температуры, влажности и давления. В профиле появляется перегиб и характер распространения радиоволн качественно меняется: основная энергия концентрируется в атмосферном волноводе, а небольшая часть рассеивается вне его. Этот случай сверхрефракции. В зависимости от расположения точки перегиба по высоте говорят о наличии приводных или приподнятых волноводов.
Приводные волноводы – довольно частое явление в районах умеренных и экваториальных широт: Индийского океана, Аравийского, Средиземного, Японского, Северного, Черного, Карибского морей. В этих районах воздух имеет высокую температуру и большую влажность.
Всеверных районах вероятность появления приводных волноводов низкая. Средние высоты приводных волноводов в Северной Атлантике составляют 14 м, в Японском море – 8 ...
12 м. Максимальная высота волноводов в 2...3 раза больше
20