Моменты инерции ТТ относительно различных осей
Момент инерции относительно оси, проходящей через цент масс тела рассчитывается согласно
определению: N
Iz mk Rk2
k 1
Iz r2dm r2dV
m V

Теорема Штейнера
если ось z не проходит через центр масс, то
для определения осевого момента инерции используют теорему Штейнера: момент
инерции тела Iz относительно любой оси равен сумме момента инерции относительно
параллельной ей оси IСz , проходящей через центр масс, и произведения массы тела на квадрат расстояния d между осями:
Iz IС z md 2
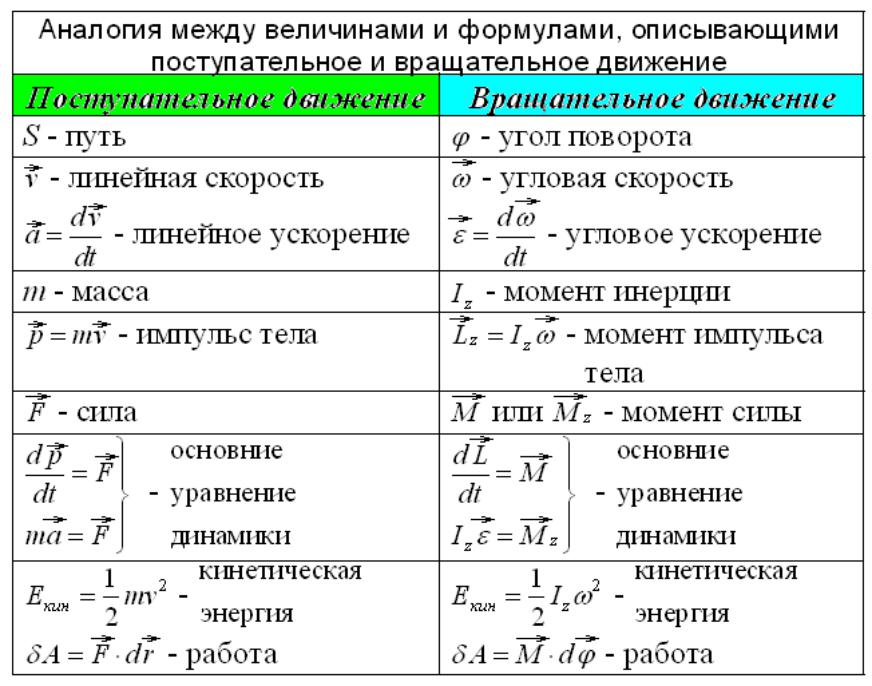
Аналогия между ПД и ВД
Сравнивая основное ур-е динамики ВД со 2 з.Н.. можно заключить, что момент инерции тела относительно оси z является мерой инертности тела по отношению к вращению, также как масса есть мера его инертности по отношению к поступательному движению.
Момент силы выполняет при вращении роль, аналогичную роли силы при поступательном движении.
Кинетическая энергия вращения
Iz |
d |
M z Iz |
d |
dt M z d |
|
dt |
|||
dt |
||||
|
|
|
|
1 |
d( |
1 Iz 2 ) A |
Eкин 2 Iz 2 |
||
|
2 |
|
|
А M d |

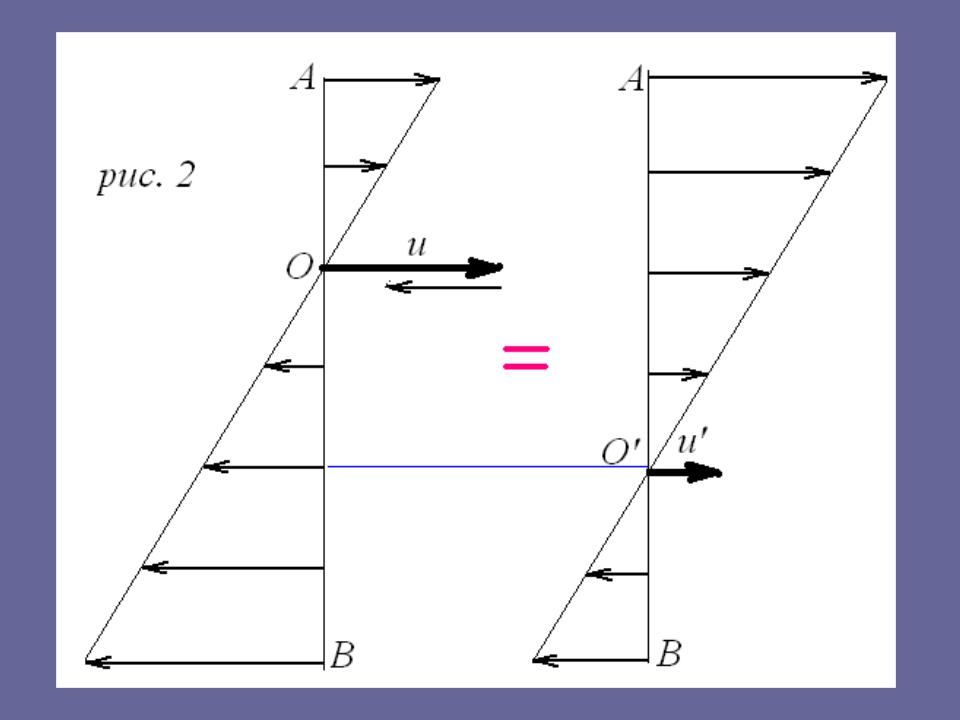
Плоское движение
Плоским называется движение. при к-м траектории всех точек лежат в параллельных плоскостях.
Движение тела в этом случае полностью определяется движением одного из его сечений в какой-либо из параллельных плоскостей.
Положение этого (плоского) сечения полностью определяется положением 2-х точек этого сечения.
Положение 2-х точек на плоскости задается 4-мя координатами, но с учетом 1 жесткой связи (расстояние между ними не меняется) имеем лишь 3 независимых параметра, т.е. число степеней свободы равно 3.
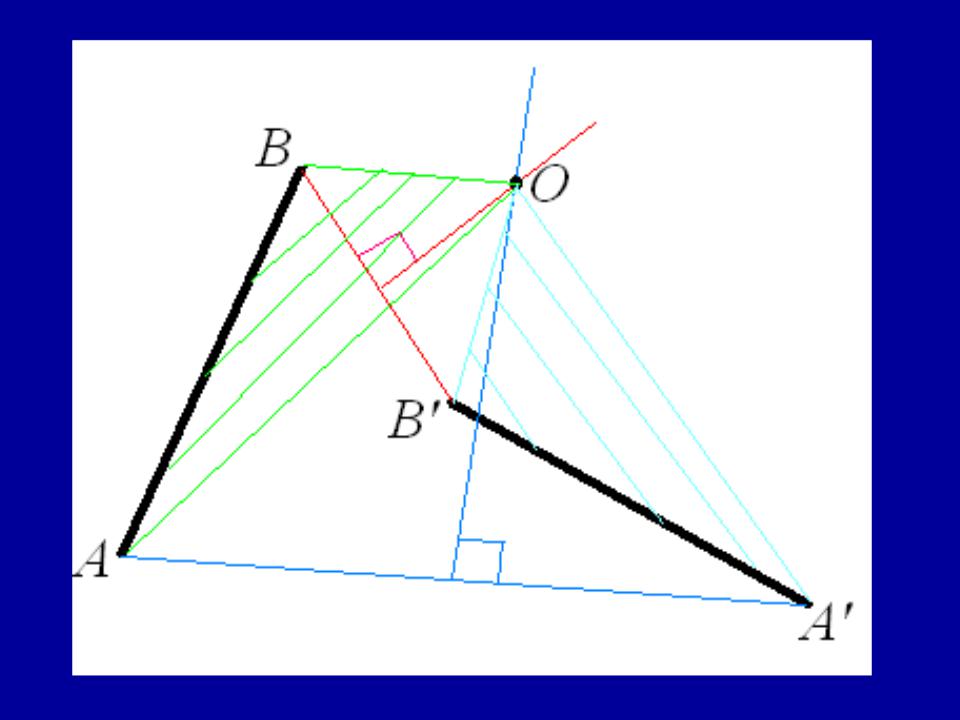
Плоское движение
•В плоском движении положение ТТ определяется положением отрезка АВ прямой, жестко связанной с его сечением (в плоскости. параллельно которой движутся точки тела).
•Рассмотрим перемещение этого отрезка в течение некоторого
промежутка времени из положения А0В0 в положение АВ (рис.1).
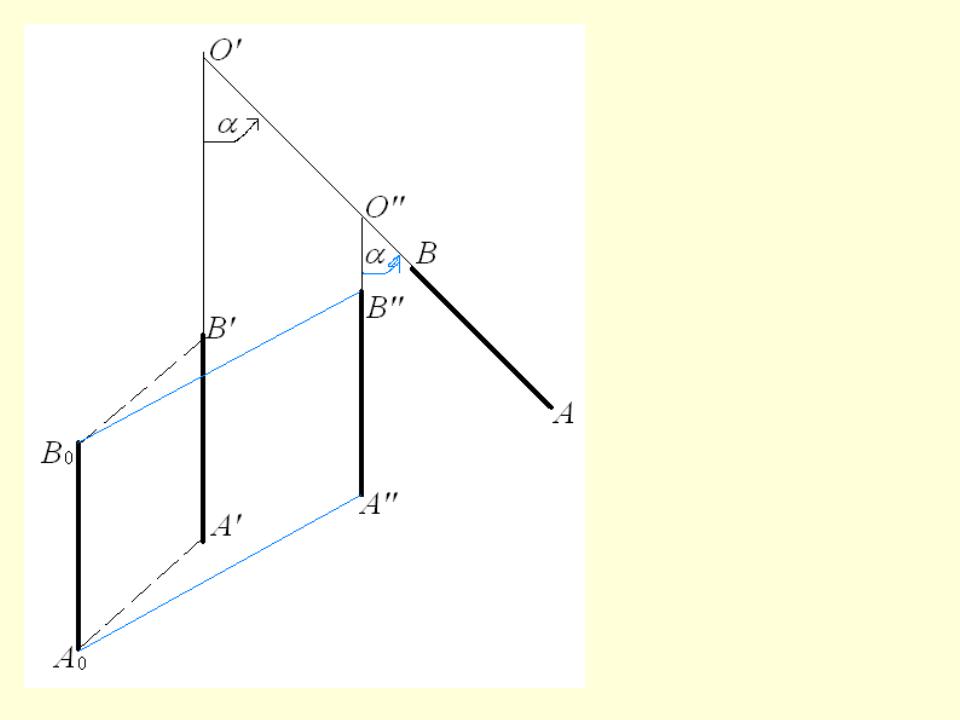
Разложение перемещения на поступательное и вращательное неоднозначно и может быть произведено бесконечным числом способов, но угол вращения во всех случаях один и тот же.