

Московский Государственный Технический Университет
им. Н. Э. Баумана
К у р с о в а я р а б о т а
по курсу «Гироприборы»
Выполнил: Студент группы ИУ1–72
Харисов Е. Р.
Преподаватель: Черников С. А.
Москва—2003
Задание на курсовую работу.
Тема:Оптимизация динамических характеристик и исследование устойчивости и автоколебаний гиросистемы с сопутствующей нелинейностью.
Содержание:
Для гиросистемы с заданными кинематической схемой и параметрами механической части:
Записать уравнения движения с сопутствующей нелинейностью.
Для идеализированной линейной системы преобразовать исходные уравнения к векторно-матричной форме и записать выражения для передаточных функций гиросистемы:
как объекта управления;
как объекта стабилизации.
Осуществить оптимизацию параметров упруго-диссипативной связи динамических элементов гиросистемы по критерию minmax|W(j)|.
Построить АЧХ механической части гиросистемы с оптимальными параметрами * и С*.
Осуществить синтез цепи обратной связи из условия заданной статической точности и необходимых запасов устойчивости. Построить ЛЧХ разомкнутой цепи.
Построить переходный процесс по интересующим координатам при действии постоянного возмущающего момента.
Построить АЧХ замкнутой гиросистемы.
Построить структурную схему гиросистемы с сопутствующей нелинейностью и преобразовать её к одноконтурной, выделив нелинейный элемент и приведённую линейную часть. Записать выражение для передаточной функции приведённой линейной части.
Обосновать возможность применения метода гармонической линеаризации. Построить ЛАЧХ приведённой линейной части.
Осуществить гармоническую линеаризацию нелинейной системы. Записать условие амплитудно-фазового баланса.
Построить АФХ приведённой линейной части и инверсную характеристику гармонически-линеаризованного нелинейного элемента.
Определить параметры периодического решения. Исследовать их устойчивость.
Численным методом решить нелинейные уравнения, полученные в пункте №1. Записать переходный процесс. Определить параметры автоколебаний.
Сравнить результаты, полученные в пунктах №12,13.
Сделать выводы о влиянии сопутствующей нелинейности на устойчивость гиросистемы.
Исходные данные:
Описание гиросистемы:
Система представляет собой Гироскопический Интегратор Линейного Ускорения (ГИЛУ) (см. Рис 1).
На оси внутренней рамки располагается Динамический Демпфер (ДД) (см. Рис 2).
В опорах внутренней и внешней рамки присутствует вязкое трение.
В опоре наружной рамки действует сухое трение (’) (см. Рис 3).
На оси внутренней рамки расположен датчик угла, который связан посредством элемента ОС с датчиком момента, расположенного на оси внешней рамки.
Параметры гиросистемы:
|
Наименование параметра |
Обозначение |
Значение |
Размерность |
|
Момент инерции внеш. рамки |
A |
1 |
гсмс2 |
|
Момент инерции внутр. рамки |
B |
1 |
гсмс2 |
|
Момент инерции ДД |
I |
0,25 |
гсмс2 |
|
Кинематический момент гироскопа |
H |
200 |
гсмс |
|
Коэф. вязкого тр. в оси внешн. рамки |
ma |
1 |
гсмс |
|
Коэф. вязкого тр. в оси внутр. рамки |
mb |
1 |
гсмс |
|
Коэффициент сухого трения |
ha |
1 |
гсм |
|
Коэффициент момента перегрузки |
mgl |
200 |
ГСМ |
|
Предельная перегрузка |
n |
10 |
— |
|
Максимально доп. стат. ошибка |
b* |
1’ |
угл. мин |

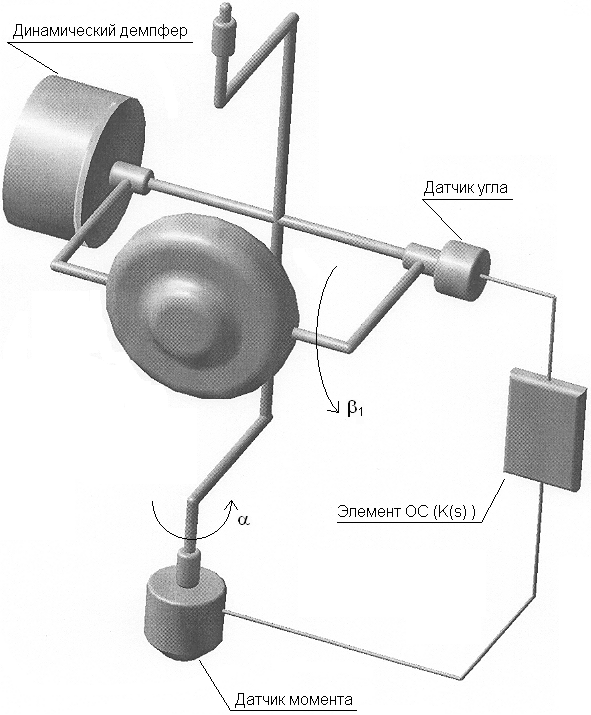
Рис2
Принципиальная схема ДД
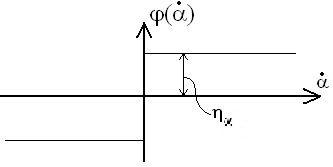
Рис3
Общий вид нелинейности
Рис1
Конструкция ГИЛУ