

ЛПЗ 11
.pdfЛАБОРАТОРНО-ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №11
РАСЧЕТ ФЕРМ
Теоретические основы
Фермой называется геометрически неизменяемая система прямолинейных стержней, соединенных на концах шарнирами.
Места соединения стержней фермы называют узлами.
Для статически определимых ферм имеет место зависимость:
|
k = 2n − 3 , |
(1) |
где k – |
число стержней; |
|
n – |
число узлов. |
|
Расчет ферм заключается в решении двух задач:
1.Определение реакций опор.
2.Определение усилий в стержнях.
1. Определение реакций опор фермы. Рассматривается рав-
новесие фермы целиком; составляются уравнения равновесия во
второй ил третьей форме. |
|
Вторая форма условий равновесия: |
|
∑ X k = 0 , ∑mA (Fk ) = 0 , ∑mB (Fk ) = 0 , |
(2) |
где ∑ X k и – сумма проекций всех сил на координатную ось x; |
|
∑ mA (Fk ) и ∑ mB (Fk ) – суммы моментов всех сил относительно
любых двух центров A и B соответственно, причем ось x и прямая AB не должны быть взаимно перпендикулярны.
Третья форма условий равновесия (уравнения трех моментов):
∑mA (Fk ) = 0 , ∑mB (Fk ) = 0 , |
∑mC (Fk ) = 0 , (3) |
где ∑ mA (Fk ), ∑ mB (Fk ) и ∑ mC (Fk ) – |
соответственно суммы |
моментов всех сил относительно любых трех центров A, B и C, не лежащих на одной прямой.
2. Определение усилий в стержнях. Делаются следующие до-
пущения:
∙все внешние нагрузки к ферме прикладываются только в узлах;
∙стержни – прямолинейные, невесомые, абсолютно твердые;
∙узлы – идеальные шарниры без трения.
1

Тогда можно полагать, что каждый стержень фермы растянут (усилие в стержне имеет знак «плюс») или сжат (знак «минус»).
Для определения усилий в стержнях применяют следующие методы:
1)Метод вырезания узлов заключается в том, что последовательно мысленно вырезают узлы фермы и рассматривают их равновесие.
2)Метод сечений (метод Риттера) заключается в том, что мысленно рассекают ферму по трем стержням, усилия в которых неизвестны, и рассматривают равновесие той части фермы, на которую действуют меньше сил. Для полученной плоской произвольной системы сил составляют уравнения равновесия, как правило, во второй или третьей форме, т.е. в виде уравнений (2) или (3).
3)Построение диаграммы Максвелла-Кремоны по сути яв-
ляется методом вырезания узлов в графической форме.
Если усилие в отдельном стержне фермы равно нулю, то такой стержень называется нулевым.
Для определения усилий в некоторых стержнях используют
леммы1 о нулевых стержнях:
Лемма 1. Если в ненагруженном узле сходятся под углом два стержня, то усилия в этих стержнях равны нулю.
Лемма 2. Если в ненагруженном узле сходятся три стержня, два из которых на одной прямой, то усилия в этих стержнях равны, а в третьем – равно нулю.
Лемма 3. Если в нагруженном узле сходятся два стержня, а линия нагрузки совпадает с осью одного из стержней, то усилие в этом стержне равно нагрузке, а во втором – нулю.
Также можно пользоваться следующими свойствами:
∙Если в нагруженном узле сходятся три стержня, два из которых на одной прямой, а линия нагрузки совпадает с осью третьего, то усилие в третьем равно нагрузке, а усилия в первых двух равны между собой.
∙Если в ненагруженном узле сходятся четыре стержня, образуя две пересекающиеся прямые, то усилия в стержнях попарно равны.
Рассмотрим вышеперечисленные методы подробнее на кон-
1 Леммой называется доказанное утверждение, полезное не само по себе, а для доказательства других утверждений.
2
кретном примере.
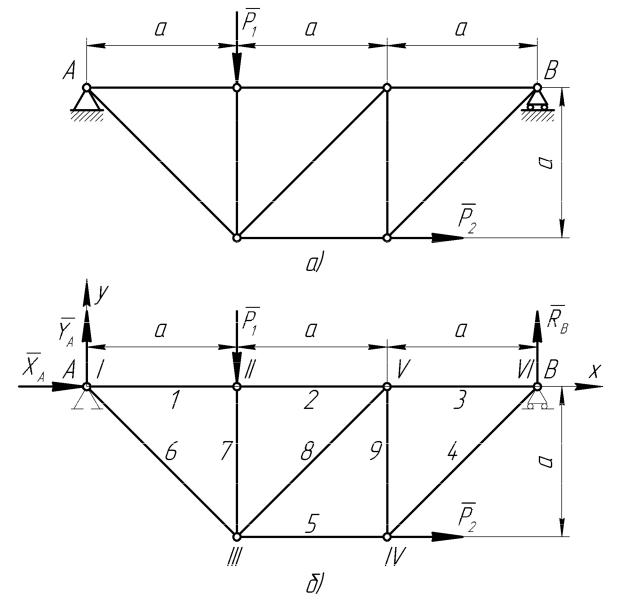
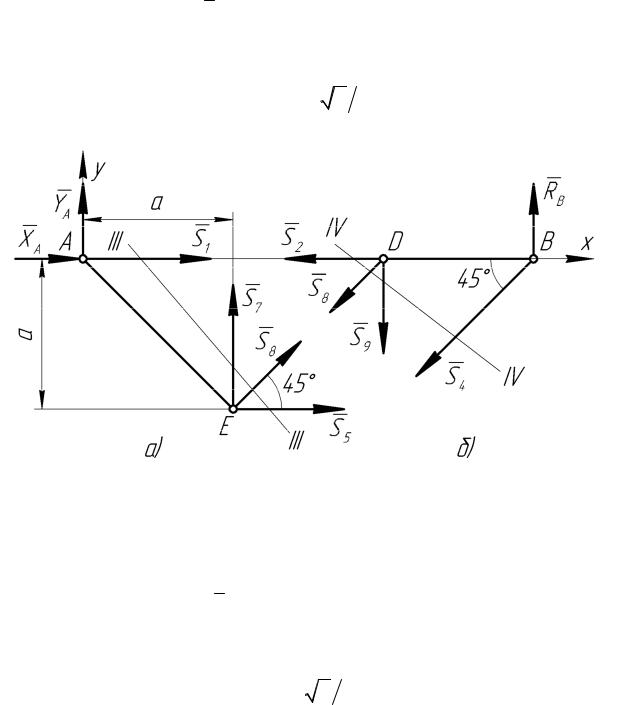
Пример. Определить реакции опор и усилия в стержнях фермы (рисунок 1, а). Ферма нагружена вертикальной силой P1 = 4 кН и горизонтальной силой P2 = 1 кН . Размеры указаны на чертеже.
Решение:
Число стержней фермы k = 9 (рисунок 1, б; стержни пронумерованы арабскими цифрами), число узлов – n = 6 (узлы пронумерованы римскими цифрами). Подставляя эти значения в формулу (1),
рассчитаем ферму на статическую определимость:
9 = 2 × 6 - 3 .
Т.к. равенство верно, то ферма не имеет лишних стержней и, соответственно, статически определима.
Рисунок 1
3
1. Определение реакций опор. Рассмотрим равновесие всей
фермы (рисунок 1, б), покажем силы P1 , P2 и опорные реакции X A ,
YA , RB . В результате получим плоскую произвольную систему сил,
для которой составим уравнения равновесия:
∑ X k = X A + P2 = 0 , ∑Yk = YA − P1 + RB = 0 ,
∑mA (Fk ) = P2 × a - P1 × a + RB × 3a = 0 .
Решая систему уравнений, найдем реакции опор фермы:
X A = − P2 = −1 кН ,
RB = P1 - P2 = 4 - 1 = 1 кН ,
3 3
YA = P1 − RB = 4 − 1 = 3 кН .
2. Метод вырезания узлов. Ферма находится в равновесии, следовательно, каждый узел фермы также находится в равновесии.
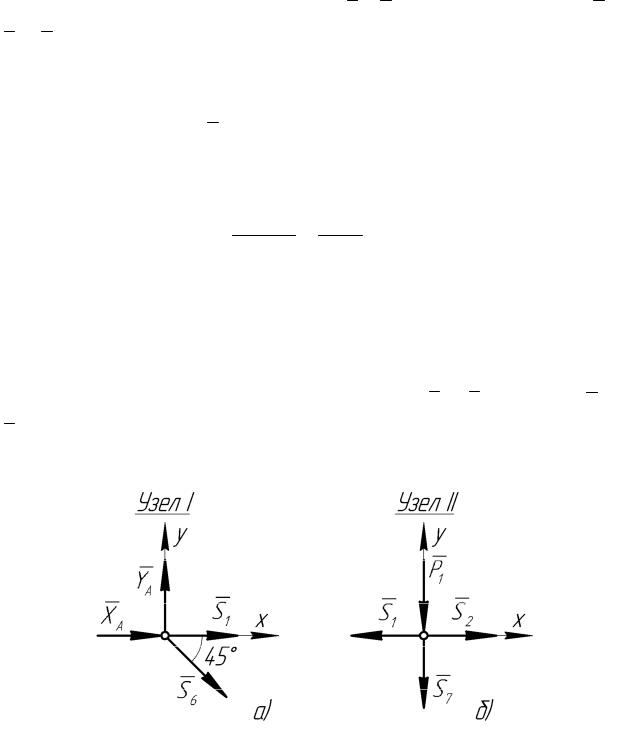
Расчет начнем с узла, в котором сходятся не более двух стержней – с узла I. Мысленно вырежем узел и рассмотрим его равновесие (рисунок 2, а). В нем приложены реакции X A , YA и усилия S1 и
S6 в стержнях 1 и 6 (предполагая, что стержни растянуты, усилия направляем от узла).
Рисунок 2
Выбираем координатные оси и для полученной плоской системы сходящихся сил составляем уравнения равновесия:
∑ X k = X A + S1 + S6 cos 45° = 0 , ∑Yk = YA − S6 sin 45° = 0 .
Решая систему, найдем усилия в стержнях 1 и 6:
4
|
|
YA |
|
|
3 |
|
|
|
|
|
|
|
||
S6 |
= |
= |
|
= 3 2 |
= 4, 24 кН , |
|||||||||
sin 45° |
|
|
|
|||||||||||
2 2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
= - X A |
- S6 cos 45° = 1 - 3 2 × |
2 |
= -2 кН . |
|
||||
|
|
2 |
|
|
Далее рассмотрим равновесие узла, в котором сходятся два стержня, усилия в которых неизвестны, – узел II (рисунок 2, б). Его
уравнения равновесия:
∑ X k = S2 − S1 = 0 , ∑Yk = − P1 − S7 = 0 ,
откуда усилия в стержнях 2 и 7:
S2 = S1 = −2 кН , S7 = − P1 = −4 кН .
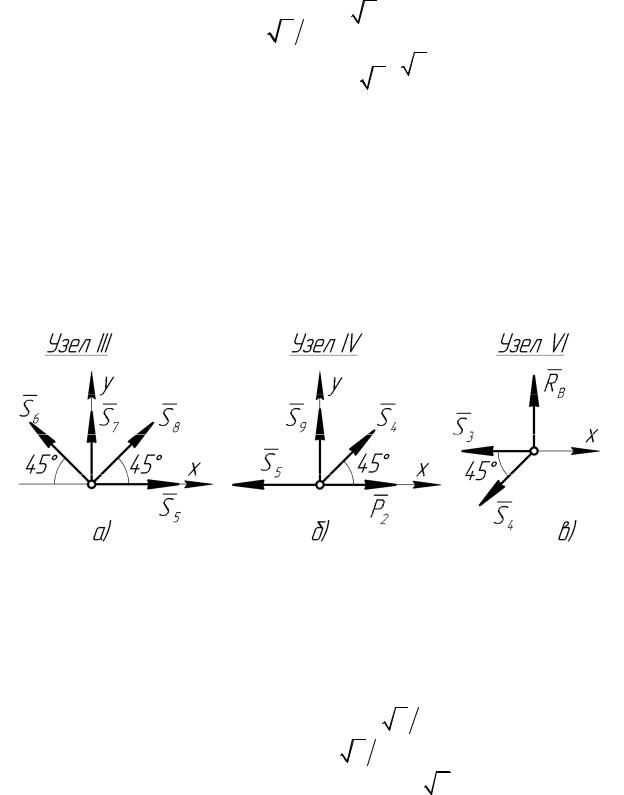
Затем последовательно рассмотрим равновесие узлов III (рисунок 3, а), IV (рисунок 3, б) и VI (рисунок 3, в).
Рисунок 3
Уравнения равновесия узла III:
∑X k = S5 + S8 cos 45° − S6 cos 45° = 0 ,
∑Yk = S7 + S6 sin 45° + S8 sin 45° = 0 ,
откуда усилия в стержнях 5 и 8:
|
|
-S7 - S6 sin 45° |
|
|
- 4, 24 × |
|
|
|
||
S8 |
= |
= |
4 |
2 2 |
= 1, 41 кН , |
|||||
sin 45° |
|
|
|
|
|
|
||||
|
2 2 |
|
|
|||||||
|
|
|
|
|
|
|
||||
S5 = ( S6 - S8 ) × cos 45° = (4, 24 - 1, 41) × 
 2
2 2 = 2 кН .
2 = 2 кН .
Уравнения равновесия узла IV:
∑ X k = P2 + S4 cos 45° − S5 = 0 , ∑Yk = S9 + S4 sin 45° = 0 ,
откуда усилия в стержнях 4 и 9:
5

S4 |
= |
S5 - P2 |
= |
2 |
- 1 |
= 1, 41 кН , |
|
cos 45° |
|
|
|
||||
|
|||||||
|
|
2 2 |
|
||||
S9 = - S4 sin 45° = -1, 41 × 
 2
2  2 = -1 кН .
2 = -1 кН .
Для узла VI достаточно составить одно уравнение равновесия:
∑ X k = - S3 - S4 cos 45° = 0 ,
чтобы найти усилие в стержне 3:
S3 = - S4 cos 45° = -1, 41 × 
 2
2  2 = -1 кН .
2 = -1 кН .
Составим таблицу усилий в стержнях и занесем полученные данные (таблица 1).
В результате расчетов усилия в стержнях 1, 2, 3, 7 и 9 получились отрицательными. Это значит, что эти стержни сжаты.
Таблица 1 – |
Таблица усилий в стержнях |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
№ стержня |
1 |
|
2 |
3 |
4 |
5 |
|
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
Усилие, кН |
-2 |
|
-2 |
-1 |
+1,41 |
+2 |
|
+4,2 |
-4 |
+1,41 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
3. Метод сечений (метод Риттера). Ферма находится в равно-
весии, следовательно, любая ее часть также находится в равновесии.
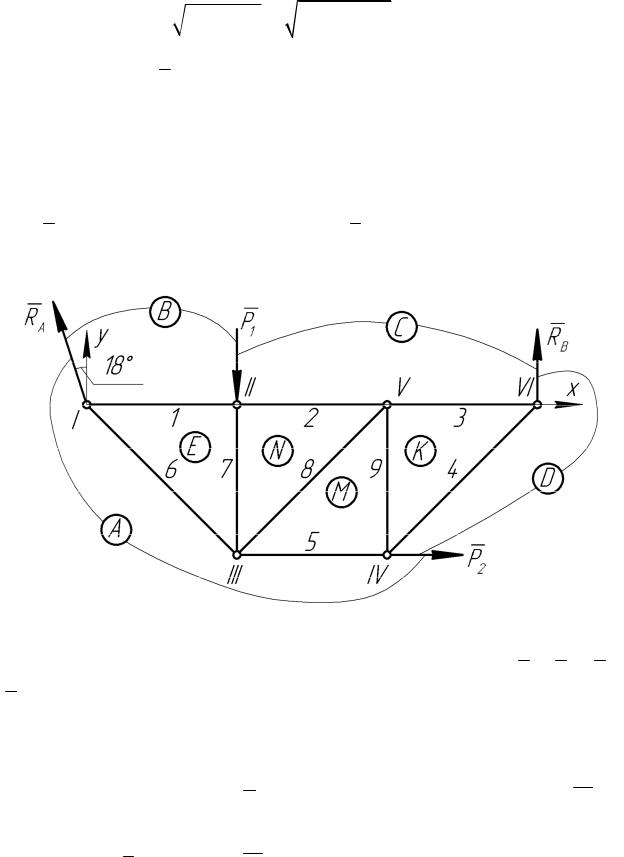
Узлы фермы обозначим латинскими прописными буквами. Рассечем ферму по линии I − I , так чтобы она пересекала три стержня, усилия в которых неизвестны, – стержни 2, 6 и 7 (рисунок 4, а).
Рассмотрим равновесие левой отсеченной части, т.к. к ней приложено меньше сил. Действие правой части на левую заменим усилиями S2 , S6 и S7 , причем, предполагая, что все стержни растянуты, усилия направляем вдоль стержней от рассматриваемой левой части (рисунок 4, б).
Для полученной плоской произвольной системы сил составим уравнения равновесия в третьей форме:
∑mA (Fk ) = -S7 × a - P1 × a = 0 ,
∑mE (Fk ) = - X A × a -YA × a - S2 × a = 0 ,
∑mC (Fk ) = S6 × a sin 45° -YA × a = 0 .
Сокращая в данной системе уравнений на a, получим:
S7 = − P1 = −4 кН , S2 = − X A − YA = 1 − 3 = −2 кН ,
6
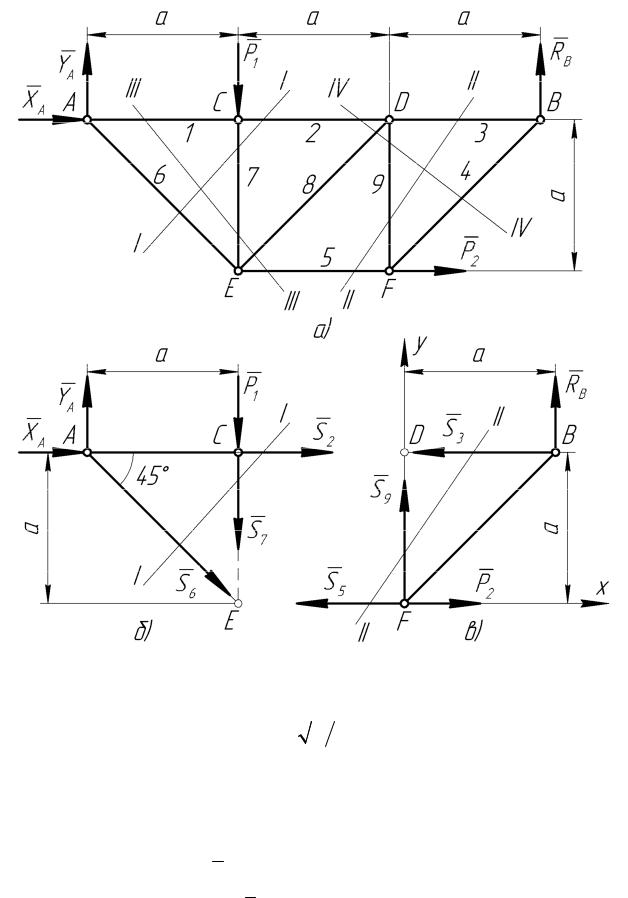
Рисунок 4
S6 |
= |
YA |
= |
|
3 |
= 4, 24 кН . |
||
sin 45° |
|
|
|
|||||
2 2 |
||||||||
|
|
|
|
|
||||
Далее рассечем ферму по линии II - II (рисунок 4, а); в этом случае в сечении окажутся стержни 3, 5 и 9. Составим уравнения равновесие для правой отсеченной части (рисунок 4, в):
∑Yk = RB + S9 = 0 ,
∑mD (Fk ) = P2 × a - S5 × a + RB × a = 0 ,
∑mF (Fk ) = S3 × a + RB × a = 0 .
Решая данную систему уравнений, получим:
7
S9 = − RB = −1 кН , S5 = P2 + RB = 1 + 1 = 2 кН ,
S3 = − RB = −1 кН .
Рассечем ферму по линии III - III (рисунок 4, а) и рассмотрим равновесие левой отсеченной части (рисунок 5, а). Для определения двух неизвестных усилий – S1 и S8 – составим два уравнения равновесия:
∑Yk = YA + S7 + S8 sin 45° = 0 ,
∑mE (Fk ) = - X A × a - S1 × a - YA × a = 0 ,
откуда:
S8 |
= - |
YA + S7 |
= - |
3 |
- |
4 |
= 1, 41 кН |
sin 45° |
|
|
|
||||
|
|||||||
|
|
2 2 |
|
||||
S1 = − X A − YA = 1 − 3 = −2 кН .
Рисунок 5
Для определения S4 рассечем ферму по линии IV − IV
(рисунок 4, а) и составим одно уравнение равновесия для правой отсеченной части (рисунок 5, б):
∑mD (Fk ) = RB × a - S4 × a sin 45° = 0 .
Усилие в стержне 4 составит:
S4 |
= |
RB |
= |
|
1 |
=1,41 кН . |
||
sin 45° |
|
|
|
|||||
2 2 |
||||||||
|
|
|
|
|
||||
Анализ найденных усилий в стержнях показывает, что они аналогичны полученным методом вырезания узлов как по модулю, так
8
ипо виду деформации.
4.Построение диаграммы Максвелла-Кремоны.
Предварительно найдем полную реакцию шарнира A:
RA = 
 X A2 + YA2 =
X A2 + YA2 = 
 (−1)2 + 32 = 3,16 кН .
(−1)2 + 32 = 3,16 кН .
Также определим направляющие косинусы, а по ним углы
наклона вектора RA к выбранным осям координат (рисунок 6):
cos ( |
|
|
A , x ) = |
X A |
= |
|
−1 |
= −0, 316 , |
||||||
R |
||||||||||||||
|
|
3,16 |
|
|||||||||||
|
|
|
|
|
|
RA |
|
|
||||||
cos ( |
|
|
, y ) = |
YA |
= |
|
3 |
|
= 0,949 , |
|||||
R |
A |
|
||||||||||||
|
3,16 |
|||||||||||||
|
|
|
|
|
|
|
RA |
|
||||||
( RA , x ) = arccos (−0, 316 ) ≈ 108° , ( RA , y ) = arccos0,949 ≈ 18° .
Рисунок 6
Пространство, лежащее между внешними силами P1 , P2 , RA ,
RB и внешним контуром фермы, разобьем на внешние области –
( A ), ( B ), (C ), ( D ). Пространство, лежащее между стержнями,
разобьем на внутренние области – ( E ), ( N ), ( K ), ( M ) .
Усилие в стержне 1 – S1 – будет соответствовать вектору be на диаграмме, т.к. стержень 1 находится на границе областей ( B ) и ( E ); усилие S2 – вектору cn и т.д.
9
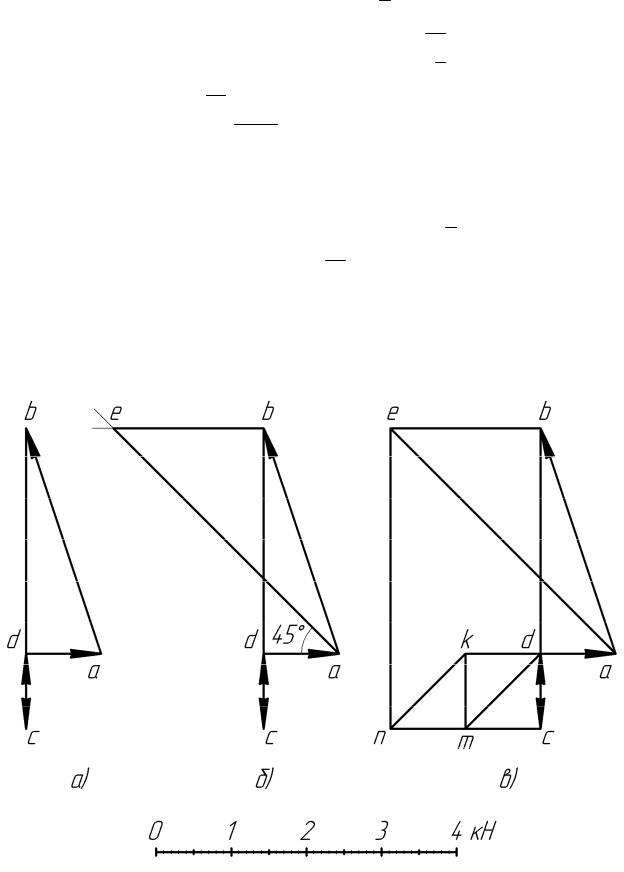
Последовательно обходя внешние области по часовой стрелке, построим многоугольник внешних сил. При переходе из области ( A ) в область ( B ) встречается реакция RA , которую на диаграмме
изображаем в выбранном масштабе вектором ab (рисунок 7, а). Далее, встречая при переходе из ( B ) в (C ) силу P1 , строим в выбран-
ном масштабе вектор bc . Обойдя остальные области в итоге полу-
чим многоугольник abcd , который и будет являться многоугольником внешних сил.
Затем выберем узел, в котором сходятся не более двух стержней – узел I. Обходя этот узел по часовой стрелке, при переходе из области ( A ) в область ( B ) встречаем реакцию RA , которая на диа-
грамме уже изображена вектором ab. На границе областей ( B ) и ( E ) находится горизонтальный стержень 1, усилие в котором неиз-
вестно. Но т.к. усилие направлено вдоль стержня, то на диаграмме проводим из b горизонтальную прямую (рисунок 7, б).
Рисунок 7
10