

§ 9.3 Дифференцирующие звенья
1. Идеальное дифференцирующее звено
Идеальное дифференцирующее звено – это звено у которого величина на выходе пропорциональна скорости изменения входной величины.
Дифференциальное уравнение звена:
![]() (1)
(1)
Передаточная функция:
![]()
Переходная функция звена:
![]()
Весовая функция:
![]()
δ’(t) можно представить в виде прямоугольных, достаточно узких и противоположных по знаку импульса, расположенных по разные стороны от точки t = 0 и стремящиеся по длительности и к 0.
Комплексная передаточная функция:
![]()
Тогда АЧХ: A(ω) = kω; ФЧХ: φ(ω) = π/2; ВЧХ: U(ω) = 0; МЧХ: V(ω) = ωk.
Асимптотическая ЛАХ звена:
![]() (+20
дБ/дек).
(+20
дБ/дек).
2. Инерционное дифференцирующее звено
Дифференциальное уравнение звена:
![]() (1)
(1)
Передаточная функция:
![]()
Реальное (инерционное) дифференцирующее звено можно представить в виде последовательного соединения идеального дифференцирующего звена и апериодического звена 1 порядка.
Переходная функция звена:
 .
.
Весовая функция:
![]() .
.
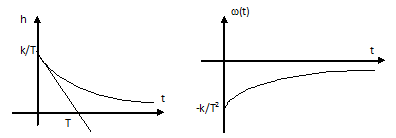
Рисунок 9.24 Временные характеристики звена
Частотные характеристики звена:
Комплексная передаточная функция:
 .
.
Отсюда
АЧХ:
![]() ФЧХ:φ(ω)
= π/2
– arctg(ωT)
;
ФЧХ:φ(ω)
= π/2
– arctg(ωT)
;
ВЧХ:
![]() МЧХ:
МЧХ:![]()
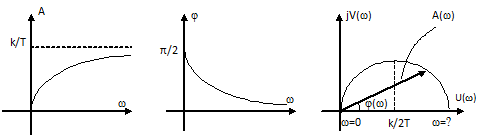
Рисунок 9.25 Частотные характеристики звена
Из уравнения ФЧХ видно, что реальное дифференцирующее звено создает опережение выходных колебаний по отношению ко входным тем меньше, чем больше частота колебаний.
Из
графика АФХ видно, что вектор W(jω)
при изменении частоты от 0 до
![]() постоянно увеличивается, а уголφ(ω)
уменьшается от π/2
до 0
постоянно увеличивается, а уголφ(ω)
уменьшается от π/2
до 0
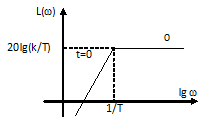
Построим асимптотическую ЛАХ звена:
L
(ω)
= 20lg(ωk)
– 20lg
![]()
1.
При
![]()
L 1(ω) = 20lg(ωk)=20 lgk + 20lg w (+20 дБ/дек).
2.
При
![]()
L 2(ω) = 20 lg wk – 20 lgwT = 20lg(k/T) (0 дБ/дек).
§ 9.4 Звено запаздывания
На практике во многих устройствах имеется так называемое транспортное запаздывание, при котором выходная величина начинает изменяться через некоторый промежуток времени после начала изменения входной величины.
Уравнение звена имеет вид:
![]()
Т огда
передаточная функция:
огда
передаточная функция:
Y(p) = e-τpX(p) => W(p) = e-τp .
Переходная функция звена:
h(t) = 1(t – τ),
весовая функция:
ω(t) = δ(t – τ).
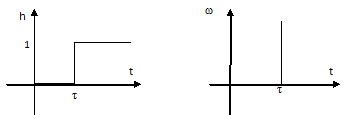
рис. 9.26 Временные характеристики звена.
Частотные характеристики:
W(jω) = e-jωτ ;A(ω) = 1; φ(ω) = -ωτ; L(ω) = 0.
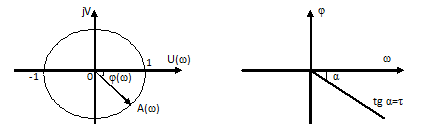
Рисунок 9.27 АФХ, ФЧХ звена.
АФХ представляет собой окружность радиуса R=1 и центром в начале координат. При w=0 вектор расположен положительной вещественной оси, с ростом частоты он поворачивается по часовой стрелке и при ω=2π/τ возвращается в исходное положение. При бесконечном увеличении частоты, вектор бесконечное число раз поворачивается вокруг начала координат.
§10. Типовые объекты регулирования и их свойства.
Объекты автоматического регулирования характеризуются некоторыми переменными и постоянными параметрами. Через объект непрерывно поступает вещество или энергия. В установившемся режиме приток вещества или энергии в объект равен расходу, в следствие чего регулируемая величина (температура, давление и т.д.) не изменяется. Если объект испытывает возмущающее воздействие, т.е. воздействие, нарушающее равенство притока и расхода вещества, регулируемая величина изменяется. Характер этого изменения зависит как от возмущающего воздействия так и от свойств объекта.
Количество вещества или энергии, содержащееся в объекте в данный момент времени называют ёмкостью объекта регулирования.
Ёмкость отражает способность объекта накапливать вещество или энергию и характеризует его инерционность.
Объект может обладать ёмкостью только при наличии в нём сопротивления выходу вещества или энергии.
Различают одноёмкостные и многоёмкостные объекты.
При всём многообразии ОР их так же, как и любые элементы САР можно классифицировать по динамическим свойствам и отнести либо к типовому динамическому звену, либо к комбинации таких звеньев.
Различают объекты с самовыравниванием (саморегулированием) и без самовыравнивания.
Самовыравнивание характеризует свойство ОР самостоятельно приходить к новому установившемуся режиму при ограниченном возмущающем воздействии.
Перечисленные ОР могут иметь запаздывания. Рассмотрим свойства ОР.