

Оглавление
Классификация и структура систем управления станками 4
1.1. Ручное управление станками 4
1.2. Автоматическое управление станками 5
1.2.1. Системы управления с распределительными валами (РВ) 9
1.2.2. Копировальные системы управления 10
1.2.3. Системы циклового программного управления 11
1.2.4. Системы числового программного управления 13
1.2.5. Адаптивные системы управления 14
Индексация станков с ЧПУ 16
3. Модели УЧПУ 17
Задачи ЧПУ 20
4.1. Геометрическая задача 20
4.1.1. Структура кадра управляющей программы 21
4.1.2. Работа УЧПУ в автоматическом режиме 22
4.1.3. Интерполяция 23
4.2. Логическая задача 25
4.3. Технологическая задача 26
4.4. Терминальная задача 28
5. Классификация систем ЧПУ 29
5.1. Системы класса NC 29
5.2. Системы класса SNC 30
5.3. Системы класса CNC 30
5.4. Системы класса DNC 31
5.5. Система класса HNC 32
5.6. Системы класса PCNC 32
6. Структура систем ЧПУ 32
6.1. Комплекс «станок с ЧПУ» 33
7. Принцип работы станков с ЧПУ 36
7.1.Состав системы ЧПУ 37
8. Приводы подач станков с ЧПУ 41
8.1. Виды применяемых электодвигателей 41
8.2. Датчики обратной связи 45
8.3. Следящий привод станков с ЧПУ 48
9. Приводы главного движения станков с ЧПУ 49
9.1. Особенности приводов главного движения
станков с ЧПУ 49
9.2. Шпиндельные группы станков с ЧПУ 50
Выбор и проектирование систем ЧПУ 52
Классификация и структура систем управления станками
Управление металлорежущими станками – это воздействие на его механизмы и устройства для выполнения требуемого технологического процесса обработки заготовки с заданными точностью, производительностью и себестоимостью обработки.
Управление станком состоит из получения информации о цели управления, о результатах управления (перемещениях рабочих органов, срабатывании различных механизмов), анализа полученной информации, выработки решения и исполнения принятого решения.
Управление станком может выполняться оператором (вручную) или без его непосредственного участия системой автоматического управления.
Ручное управление станками
Управление станком упрощается при применении устройств цифровой индикации и управления (УЦИУ). Схема самого простого УЦИУ показана на рис. 1.1. При перемещении рабочего органа станка (стола, суппорта, шпиндельной бабки) подвижная часть 5 измерительного преобразователя (ИП), связанная с рабочим органом, проходя относительно неподвижной части 4 ИП, преобразует перемещение в пропорциональное ему число импульсов, которые поступают в счетчик 2 и индицируются на цифровом табло 3.
Начало отсчета может быть совмещено с любой точкой контролируемого перемещения путем установки счетчика на нуль. В качестве ИП в УЦИУ применяются импульсные фотоэлектрические ИП со штриховыми шкалами, а также фазовые ИП (сельсины и индуктосины).
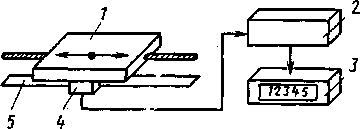
Рис. 1.1. Схема устройства цифровой индикации
УЦИУ классифицируют по следующим уровням автоматизации станков:
а) измерительный уровень, когда УЦИУ выполняет только функции отсчета перемещений;
б) уровень выдачи рекомендаций оператору станка, когда УЦИУ осуществляет функцию предварительного набора перемещений. В этом случае оператор набирает требуемые величины перемещений рабочих органов, а затем перемещает их вручную до достижения нулевых показаний на цифровом табло УЦИУ;
в) уровень выдачи оператору рекомендаций, записанных в рабочей программе, когда на цифровом табло по программе высвечиваются требуемые значения и направления перемещения и оператор вручную их отрабатывает;
г) управляющий уровень, когда УЦИУ выполняет функции предварительного набора перемещений и их автоматической отработки. Оператор в этом случае только нажимает на кнопку, а станок отрабатывает заданные перемещения. При этом команды позиционирования выдает УЦИУ;
д) управляющий программный уровень, когда УЦИУ работает автоматически по программе, т. е. выполняет функции, аналогичные функциям устройства числового программного управления.
Кроме режимов работы, отвечающих разным уровням автоматизации, УЦИУ может иметь также и другие режимы, например записи программы, самодиагностирования и т. д.
По функциональным возможностям УЦИУ разделяют на две группы:
а) УЦИУ общего назначения без ориентации их технологических функций на определенную группу станков, выполняющие только простейшие функции цифрового отсчета величин перемещений;
б) УЦИУ, функционально ориентированные на определенный тип станков.