

Лабораторная_1
.pdf81
рис. 1
Шар, фиксированный электромагнитом, обладает потенциальной энергией
(рис. 1):
Mgh = Mgl(1 |
−cosα) = 2Mgl sin 2 α |
, |
(5) |
|
2 |
|
|
которая к моменту удара (в нижнем положении) переходит в кинетическую энергию шара:
2Mgl sin 2 α |
= |
MV 2 |
, |
(6) |
|
2 |
|||||
2 |
|
|
|
откуда его скорость в момент удара равна:
V = gl 2sin |
α |
(7) |
|
2 |
|
Шар массы m, получив при ударе скорость x, отклоняется на угол β, который связан со скоростью аналогичным соотношением:
x = gl 2sin |
β |
(8) |
|
2 |
|
Для проверки соотношений (2) и (4), являющихся следствиями закона сохранения импульса, нужно убедиться (в пределах точности измерений) в справедливости соотношений
sin |
β |
= |
2 sin (α / 2) |
(9) |
|||||
2 |
|
1 + m / M |
|||||||
|
|
|
|
|
|||||
в случае упругого удара, и |
|
β |
|
|
|
sin (α / 2) |
|
|
|
sin |
|
= |
|
(10) |
|||||
|
|
1 + m / M |
|||||||
|
2 |
|
|
|
|||||
82
в случае неупругого удара.
(В соотношениях 9 и 10 сокращены множители gl – предполагается, что
шары хорошо отцентрированы, и длины нитей, на которых они подвешены, с высокой точностью равны.
Порядок выполнения работы
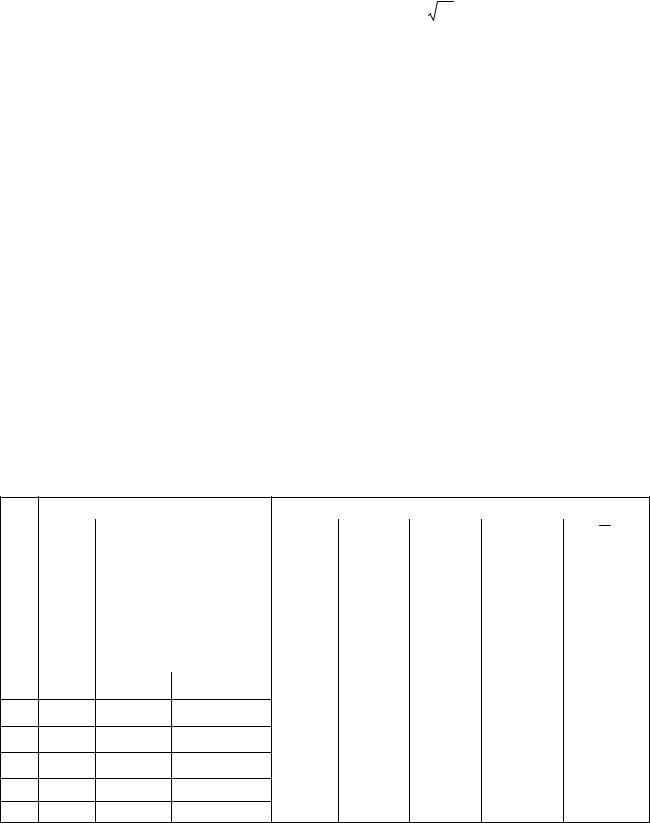
1.Правый и левый шары навинчиваются соответственно на правое и левое острие подвески и регулируются до совпадения уровней, линий, нанесённых по центру шаров. На шарах указаны номера, а на установке – соответствующие номерам массы шаров.
2.Включить секундомер в сеть, нажать клавишу (сеть) и отжать клавишу (старт). Воротком отрегулировать силу электромагнита, чтобы он удерживал шар.
3.Правый шар отодвинуть в сторону электромагнита и блокировать его в этом положении; левый установить неподвижным в положении равновесия.
4.Зафиксировать угол отклонения правого шара α и погрешность установки
угла Δαприб..
5.Нажать на клавишу (сброс).
6.Нажать на клавишу (старт), и после столкновения зафиксировать угол β
отклонения левого шара и погрешность определения угла Δβприб., а также продолжительность соударения по шкале секундомера. Измерения провести 6 раз и данные измерений занести в табл. 1.
Таблица 1
|
|
Измерения |
|
|
|
|
Расчёты |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
α |
|
|
||
М = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|||||||
|
m = |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
α = |
β = |
|
|
|
|
|
|
||||||||||||
М = |
|
t , время t = |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
m = |
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
1 |
+ |
|
m |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|||
α о = |
|
β о |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αпр |
= |
|
соударения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
β |
пр |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
2
3
4
5
6
7.Заменить левый шар шаром с другой массой и провести измерения по пунктам 1-6. Данные занести в табл. 2, аналогичную табл. 1, но для другой массы.
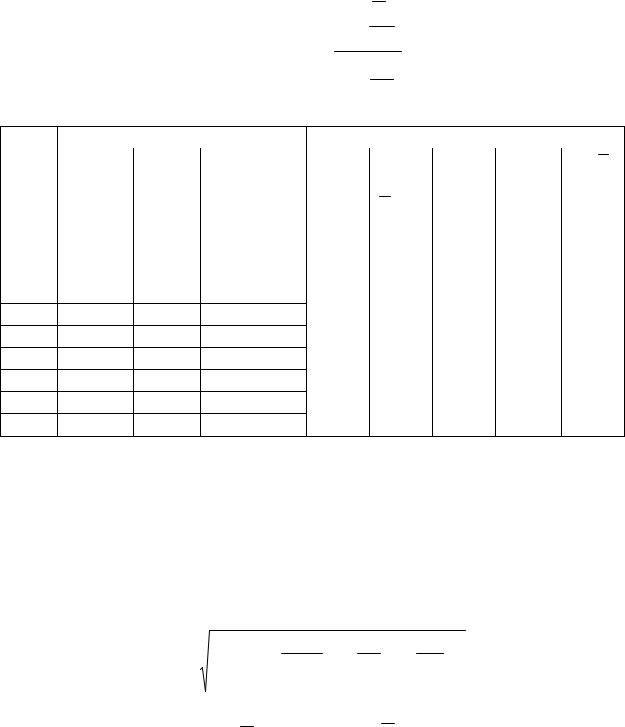
8.Заменить оба шара на пластилиновые, повторить пункты 1-6 (за
83
исключением времени соударения), данные занести в табл. 3 (в последней
sin α
колонке табл. 3 рассчитывается величина 2 , формула 10).
(1 + Mm )
Таблица 3
|
|
|
Измерения |
|
|
|
|
Расчёты |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|||
М |
= |
|
m = |
|
t , время |
|
|
|
α |
|
|
= sin |
|
2 |
|
|
|||||
|
|
t = |
= β |
|
|
|
|
|
|
||||||||||||
|
|
2 |
1+ |
m |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
М = |
m = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α о |
= |
|
β о |
= |
|
соударения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
пр |
= |
β |
пр |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1
2
3
4
5
6
9. Провести расчёты и убедиться в справедливости соотношений (9) и (10) в пределах точности измерений.
Примечание. Погрешность измерений в данном случае определяется формулами:
|
|
|
|
|
|
f = |
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
; |
|
|
|
|
|
F = |
|
EF ; |
|||||||||||||||||||
|
|
|
|
|
|
fE f ; |
|
|
|
|
|
E f = |
|
|
|
|
|
|
|
F |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2tg |
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
α |
|
|
2 |
|
2 |
|
|
|
|
|
2 |
|
|
|
m |
|
|
2 |
|
|
|
|
M |
2 |
|
|||||||||
|
|
|
|
|
|
EF = |
|
|
|
( |
|
|
|
|
) |
|
|
+ ( |
|
|
m |
) |
|
|
|
( |
|
|
) |
|
+ ( |
|
|
|
) |
, |
|||||||||||||
|
|
|
|
|
|
2 |
|
|
|
α |
|
|
|
|
|
|
m |
|
M |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
tg |
|
|
|
|
|
1+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
2sin |
α |
|
|
|
|
|
|
|
|
|
|
= |
sin |
|
α |
ср. |
|
|
|
|
|
|
||||||||||||||||
|
|
|
β |
; |
|
|
= |
2 |
|
|
или |
|
|
|
|
|
2 |
|
|
|
– |
соответственно левая и |
|||||||||||||||||||||||||||
где f |
= sin |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
F |
|
|
|
|
|
|
|
|
F |
|
|
|
|||||||||||||||||||||||||||||||||||||
2 |
|
1+ |
|
m |
|
|
|
|
|
|
|
m |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|||||||||||||
правая части равенств (9) и (10). Погрешности Δβ и Δα углов отклонения берутся в радианах:
αрад. = |
αo π |
. |
|
||
|
180o |
|
84
Контрольные вопросы
1.Что называется импульсом тела? Системы тел?
2.Что такое замкнутая система взаимодействующих тел?
3.Сформулируйте на основе проведённых измерений закон сохранения импульса.
4.Шары массы m и 2m подвешены на одинаковых нитях. Шар массы 2m отведён на угол 30о и сталкивается упруго с шаром массы m. На какой угол отклонится шар массы 2m?
5.Прикиньте по результатам третьего опыта, какая часть энергии пластилиновых шаров перешла в тепло?
6.Чем могут быть вызваны численные отклонения при проверке равенств (9)
и(10)?
7.Могут ли отдельные составляющие импульса сохраняться и в незамкнутой системе? Приведите примеры.
85
РАБОТА 14 б ОПРЕДЕЛЕНИЕ СКОРОСТИ ПУЛИ С ПОМОЩЬЮ
БАЛЛИСТИЧЕСКОГО КРУТИЛЬНОГО МАЯТНИКА
Цель работы: изучение основных закономерностей вращательного и колебательного движений на примере крутильного маятника. Колебательное движение происходит за счёт попадания в него пули (снаряда), выпущенного из стреляющего устройства.
Приборы и принадлежности: баллистический крутильный маятник со встроенным в него секундомером и счётчиком числа колебаний. Маятник называется баллистическим, если за время удара (в данном случае пули) он не успевает заметно сдвинуться с места, т.е. τ << T , где τ – время движения пули внутри маятника, а Т - период его колебаний.
Описание установки и метода измерений.
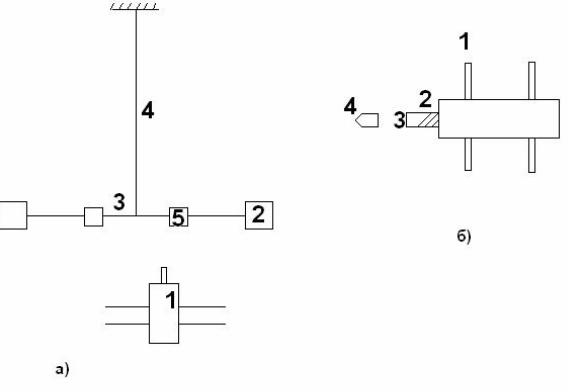
рис. 1
Основными элементами баллистического крутильного маятника являются (см. рис. 1 а): стреляющее устройство 1, пуля из которого попадает в ёмкость 2, заполненную пластилином и укреплённую на одном из стержней 3 маятника. Сам маятник подвешен на стальной проволоке 4, на его стержнях 3 размещаются два груза 5, положение которых относительно оси колебаний маятника может меняться. В данной работе изучение основных закономерностей вращательного и колебательного движений проводится на примере определения скорости пули (снаряда), вылетающей из стреляющего устройства 1 и испытывающей неупругий удар с ёмкостью 2 маятника. При

86
соударении пули с маятником на последний действует момент силы Mz относительно оси вращения Z (ось Z в данном случае совпадает с проволокой 4). При повороте маятника на угол φ проволока закручивается и возникает момент сил – Mz, стремящийся вернуть маятник в положение равновесия. Опыт показывает, что в довольно широких пределах момент Mz пропорционален углу φ поворота маятника, т.е.
M z = − fϕ , |
(1) |
где коэффициент пропорциональности f зависит от свойства проволоки и называется модулем кручения.
С другой стороны, в соответствии с основным законом вращательного движения имеем
M |
|
= I |
ε = I |
|
d 2ϕ |
, |
(2) |
|
|
|
|||||
|
z |
z |
|
z dt 2 |
|
||
где ε — угловое ускорение маятника, а IZ — его момент инерции (относительно той же оси). В дальнейшем для сокращения записи будем опускать подстрочный индекс Z, имея мысленно его в виду. Выражения (1) и (2) позволяют записать основное уравнение колебательного движения крутильного маятника
ϕ&&+ |
f |
ϕ = 0 |
(3) |
|
I |
||||
|
|
|
Это дифференциальное уравнение второго порядка, оно определяет характер колебаний маятника с течением времени. В отсутствии затухания колебания
носят гармонический характер, т.е. ϕ =ϕ0 sin 2Tπ t , где φ0 – амплитуда колебаний,
а Т – их период. Тогда угловая скорость (не путать с угловой частотой, которая обозначается той же буквой ω) будет изменяться со временем по закону:
dϕ |
= |
2πϕ0 |
cos |
2π |
t =ω0 |
cos |
2π |
t , |
(4) |
dt |
T |
|
|
||||||
|
|
T |
|
T |
|
||||
где ω0 = 2πϕT 0 – амплитуда угловой скорости. Поэтому
T = |
2πϕ0 |
(5) |
|
ω |
0 |
||
|
|
|
|
Сдругой стороны период колебаний Т определяется и параметрами системы,
вданном случае модулем кручения f и моментом инерции I. Поэтому не

87
удивительно, что в уравнениях типа (3) коэффициент, стоящий перед φ, представляет собой квадрат собственной частоты системы, то есть ω2 = If . В результате для периода колебаний маятника Т получаем
T = |
2π |
= 2π |
I |
(6) |
|
ω |
|
f |
|
Модуль кручения f во многих случаях является неизвестным, поэтому его желательно исключить из уравнений. Для этого целесообразно измерить периоды колебаний Т1 и Т2 при разных моментах инерции I1 и I2. Изменение последних легко произвести путём перемещения грузов 5 относительно стержней 3. Так как модуль кручения зависит лишь от свойств данной проволоки 4, то из (6) получаем
T 2 |
= |
I |
1 |
(7) |
|
1 |
|
||||
T 2 |
I |
2 |
|||
|
|
||||
2 |
|
|
|
Рассмотрим, из каких величин складывается момент инерции маятника I. Он является суммой моментов инерции стержней Iст, грузов Iгр, а также элементов крепления маятника на проволоке Iкр. В свою очередь, по теореме Штейнера, Iгр может быть представлен как Iгр = Iгр,C + 2MR2 , где Iгр,С – момент инерции грузов
относительно осей, проходящих через их центры масс; 2М – масса двух грузов; R – расстояние между центром масс какого-либо груза и осью Z. В результате можно записать
I = I '+2MR2 , |
(8) |
где I ' = Iст + Iгр,C + Iкр .
Подставляя (8) в (7) и вычитая единицу из обеих частей равенства (7), получаем
T 2 |
−T 2 |
= |
2M (R2 |
− R2 ) |
. |
(9) |
|
1 |
2 |
1 |
|
2 |
|||
T 2 |
I |
2 |
|
||||
|
|
|
|
||||
|
2 |
|
|
|
|
|
|
Все величины в (9) являются легко измеримыми экспериментально за исключением I2, поэтому целесообразно выразить I2 через момент импульса L2, к которому возможно применить закон сохранения (в случае замкнутой
системы). Так как |
L2 |
= I2ω02 , а Т = |
2πϕ0 |
(в соответствии с (5)), то (9) |
|
ω |
|||||
|
|
|
|
||
|
|
|
0 |
|
перепишется в виде

88
|
|
L |
2 |
|
= |
2M (R2 |
− R2 ) |
(10) |
||
|
|
|
|
|
1 |
2 |
||||
T |
2 |
2πϕ |
0 |
T 2 |
−T 2 |
|||||
|
|
|||||||||
|
|
|
|
1 |
|
2 |
|
|||
Систему пуля плюс маятник можно рассматривать как замкнутую, поэтому момент импульса такой системы, то есть L + L2 = const , где L – момент импульса пули, его величина равна L = mVr , где m и V – масса и скорость пули, а r – расстояние от места попадания пули в маятник до оси его вращения. Можно считать, что во время удара момент импульса пули целиком передаётся маятнику, то есть L2 = L = mVr (полагаем, что m<<M). В результате получаем конечную формулу для скорости пули V через легко измеряемые экспериментальные величины. Из (10) имеем
V = |
4πT |
ϕ |
0 |
M (R2 |
− R2 ) |
, |
(11) |
||
2 |
|
|
1 |
2 |
|||||
mr(T 2 |
−T 2 ) |
||||||||
|
|
|
|||||||
|
|
|
|
1 |
|
2 |
|
|
|
где R1 и R2 - расстояния от оси вращения маятника до центра масс грузов в первом и втором положении соответственно; Т1 и Т2 – периоды колебаний крутильного маятника в этих положениях; φ0 – максимальный угол отклонения маятника; r – расстояние от оси Z до центра снаряда в месте его попадания в маятник; m и M – массы пули и груза соответственно.
Порядок выполнения работы
1.Записывают приведённые на установке значения массы пули m,
расстояние r и массы груза M. Измеряют расстояния R1 и R2 от центров грузов до оси вращения маятника в крайнем правом и крайнем левом положениях. Результаты измерения записывает с учётом систематической ошибки.
2.Закладывают пулю (снаряд) в стреляющее устройство (рис. 1 б). Для проведения выстрела необходимо: а) отжать рычаг 1 на себя до его полного закрепления; б) в этом положении опустить рычаг 1 вниз до освобождения пружины 2 на стержне 3. Пружина 3 выстреливает снаряд 4 в горизонтальном направлении.
3.Отсчитывают максимальный угол поворота маятника φ0 (начальное положение маятника должно соответствовать нулю градусов угловой шкалы
прибора). Далее повторно отклоняют рукой маятник на угол φ0, включают измеритель и пускают маятник, число и время колебаний которого высвечивается на приборе. Измерения проводят пять раз. Результаты измерений записывают в таблицу.
4.Пункты 2 и 3 повторяют при расстоянии R2 от центров грузов оси вращения.
5. Среднеквадратичную ошибку косвенного измерения V рассчитывают по формулам:
EV = VV ,
89
E 2 |
= E 2 |
+ E 2 |
+ E 2 |
+ E 2 |
+ E 2 |
+ |
|
4 |
[R2 |
( |
R )2 |
+ R2 |
( |
R |
)2 ] + |
|
4 |
[T 2 |
( T )2 |
+T 2 |
( T )2 |
] |
|
(R2 |
− R2 )2 |
(T 2 |
−T 2 )2 |
||||||||||||||||||||
V |
ϕ2 |
ϕ0 |
M |
m |
r |
|
1 |
|
1 |
2 |
|
2 |
|
1 |
1 |
2 |
2 |
|
|||||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
Для уменьшения количества вычислений целесообразно оценить относительный вклад отдельных слагаемых в этой сумме и пренебречь малыми членами.
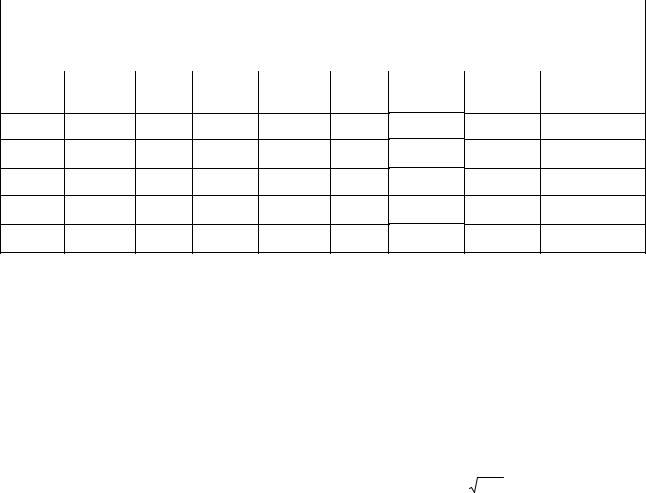
Таблица.
m = |
M = |
r = |
|
R1 = |
|
|
R2 = |
|
ϕo = |
|||||
(в радианах) |
|
|
|
|
|
|
|
|
|
|
||||
m = |
M = |
r = |
R1 = |
|
|
R2 = |
|
ϕo = |
||||||
№ |
10Т1 с |
|
с |
Т1 с 10Т2 с |
|
с |
Т2 с |
|
|
м/с |
|
м/с |
||
Т1 |
Т2 |
|||||||||||||
V |
V |
|||||||||||||
1
2
3
4
5
Контрольные вопросы
1.Дать определение момента силы относительно точки и относительно оси, проходящей через эту точку, и объяснить смысл входящих в него величин.
2.Дать определение момента импульса относительно точки и относительно оси, проходящей через эту точку, и объяснить смысл входящих в него величин.
3.Основной закон вращательного движения. Разные формы его записи.
4.Вывести уравнение, описывающее колебательное движение груза массой m; прикрепленного к пружине, коэффициент упругости которой равен k.
Показать, что общим решением этого уравнения |
является функция |
X = Acos(ω t +α) , где А и α – произвольные постоянные; ω = |
k / m . |
5.Пусть имеется маятник массой М, подвешенный на нити длиной L. В маятник попадает пуля (снаряд) массой m, летящая со скоростью V, при этом маятник отклоняется в горизонтальном направлении на расстояние l. Вывести выражение для скорости пули V через измеряемые параметры. Удар пули о маятник считать неупругим, массу маятника М>>m, а отклонение маятника малым, так что l<<L.
6.Следует ли из основного закона динамики вращательного движения закон сохранения момента импульса? Если да, то как именно?
7.Орбиты всех планет Солнечной системы лежат в одной плоскости (эклиптики), причем ориентация этой плоскости в пространстве не меняется со времени образования Солнечной системы. Связан ли этот факт с законом сохранения момента импульса?
90
РАБОТА 15 ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРЕНИЯ КАЧЕНИЯ
Приборы и принадлежности: прибор «Наклонный маятник», комплект плоскостей и шаров, штангенциркуль или микрометр.
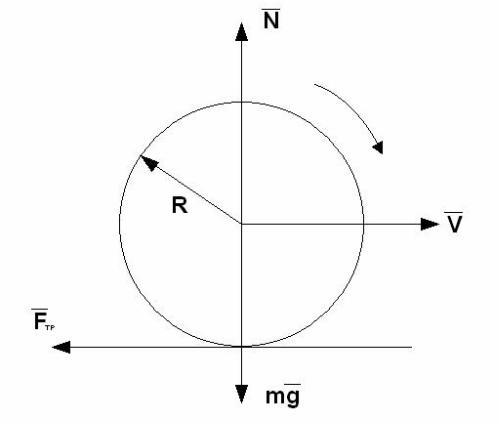
Введение. Сила трения качения пропорциональна силе нормального давления N и обратно пропорциональна радиусу вращающегося цилиндра или шара R (рис. 1).
Fкач. = k |
N |
(1) |
|
R |
|||
|
|
рис. 1
Если шарик совершает собственные колебания, вращаясь по плоскости (ниже рассмотрено, как это осуществляется в данной лабораторной установке), то под действием постоянной силы трения качения его механическая энергия будет уменьшаться. Соответственно будет уменьшаться амплитуда колебаний. Оценить уменьшение амплитуды можно следующим образом (рис. 2). Работа постоянной силы трения качения Fкач. за один полный период колебания численно равна произведению силы на путь
A0 |
= Fкач. 2S = Fкач. 4lα0 , |
(2) |
где α0 – первоначальный угол |
отклонения (рис. 2). Из-за |
уменьшения |