

kursovoy_teoria_poletaVika
.docxОглавление
Исходные данные для варианта № 2.7 ……………………….…………3
1.Математическая модель движения ракет РКЛА на АУТ 5
1.1.Принятые допущения и системы координат 5
1.2.Модели внешней среды 5
1.3.Схема сил, зависимости для сил. 7
1.4.Уравнение движения на АУТ (С учетом допущений) 8
1.5.Выбор функции угла тангажа 9
2.Определение дальности полета 11
2.1.Допущения и системы координат 11
2.2.Схема сил 11
2.3.Уравнения движения 12
2.4.Расчет полной дальности 13
3.Приложения 14
3.1. Расчет на ЭВМ 14
Тема: Рассчитать траекторию и параметры движения РКЛА по его конструктивным параметрам. Определить полную дальность полета.
Исходные данные для варианта № 2.7:
|
№ ступени |
G0i |
ki |
|
Pмi |
Pуд.пi |
Sai |
ki |
|
кгс |
- |
- |
кгс/м2 |
сек. |
м2 |
(град.) |
|
|
1 |
210000 |
0,40 |
0,60 |
14000 |
320 |
3,30 |
32 |
|
2 |
55000 |
0,20 |
0,95 |
10000 |
350 |
1,15 |
32 |
где
Goi – стартовые веса ступеней;
μki = Gki/Goi – коэффициент конструктивно совершенства;
ν= Goi/Pni – коэффициент энерговооруженности ступени;
Pмi = Goi/Sмі – нагрузка на мидель (или характерное сечение РКЛА);
Pуд.пі = Pni/G - удельная тяга, которая характеризует энергетические свойства компонентов топлива;
Sai – площадь выходного сечения сопла;
ki – угол бросания.
-
Математическая модель движения ракет РКЛА на АУТ
-
Принятые допущения и системы координат
-
- движение плоское, Земля не вращается;
- атмосферу принимаем стандартную сферическую, гравитационное поле однородное сферическое (то есть атмосфера не зависит от расположения и поры года пуска);
- угол атаки значительно меньше 1, << 1, 0 < 7; sin ; cos 1
- управление РКЛА безинерционное (Муп Мад).
Для определения текущей высоты и дальности полета используем стартовую систему координат О0XgсYgс; для текущих ускорений поступательного движения центра масс РКЛА используют скоростную систему координат.
-
Модели внешней среды
Внешняя среда включает атмосферу и гравитационное поле планеты. Для АУТ используем модель стандартной атмосферы, у которой ее параметры: давление Р = Р(Н), плотность = (Н), скорость звука а = а(Н) есть функции только от высоты полет Н. Для поверхности Земли принятые значения Н = 0:
- Р0 = 10332 кгс/м2,
- = 0,125 кгсс2/м4,
- а = 340,3 м/с,
- Т0 = 288К (15С).

Изменение параметров с высотой описывается таблицами стандартной атмосферы. На основании таблиц стандартной атмосферы построим зависимости давления и плотности:



Модель гравитационного поля зависит от фигуры гравитирующего центра.

Используем модель однородного сферического поля. Полагаем, что планета Земля есть шар равномерной плотности З = const, равный по объему реальной Земле (Rшара = 6371,11 км). Основной параметр поля ускорение свободного падения g = g(H) есть функция высоты полета Н. Для поверхности Земли g0 (H = 0) = 9,806 м/с2. Для произвольной высоты полета:
Ускорение g(r) направлено по радиусу к гравитирующему центру (центру Земли).

-
Схема сил, зависимости для сил.
Для представления сил действующих в полете на АУТ используем стартовую О0XgсYgс, связанную OXY и скоростную OXaYa системы координат.
Охарактеризуем силы:
-
Силы тяжести
 :
:


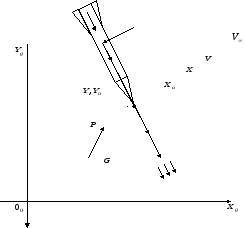
На рисунке:
G-сила тяжести;
P-сила тяги;
Xа-сила лобового сопротивления.
Сила тяги
 :
:

Тяга на старте РН = Р0

Тяга в пустоте РН = 0

Высотная
характеристика




-
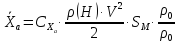
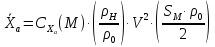
Сила лобового сопротивления
 :
:
-
Уравнение движения на АУТ (С учетом допущений)
-
Динамическое уравнение, характеризующее скорость поступательного движения центра масс РКЛА, запишем проектируя уравнение Мещерского:
на выбранную систему координат OXaYa.


-
Кинематическое уравнение дальности и высоты полета РКЛА получим проектируя
 на оси О0XgсYgс.
на оси О0XgсYgс.

Полученные системы уравнений дополняются зависимостями для функций изменения массы РКЛА

и функциями угла разворота ракеты по тангажу

-
Выбор функции угла тангажа
Программой тангажа называется периодическое изменение угла наклона оси ракеты OX относительно плоскости стартового горизонта O0XgcZgc.

Функция
 должна отображать реализуемую РКЛА
форму траектории АУТ. Представим
траекторию как составную, включающую:
должна отображать реализуемую РКЛА
форму траектории АУТ. Представим
траекторию как составную, включающую:
-
стартовый участок, форма – вертикаль,
 ,
израсходованное топливо
,
израсходованное топливо
 ;
;
-
участок разворота ab, форма
траектории – парабола, 90
>
к,
 ;
;
-
участок поведения в точке К,
= к =
const, форма траектории – наклонная прямая,




Конструктивные параметры Кинематические параметры

Функция разворота учитывает также ограничения:
- вертикальный старт;
- непрерывность
 ;
;
- нулевые углы атаки .


-
Определение дальности полета
-
Допущения и системы координат
-
- движение плоское з = 0;
- гравитационное поле однородное сферическое g = g(r);
- атмосфера отсутствует (Ra = 0);
- считаем РКЛА материальной точкой;
- используем полярную систему координат Озr с началом в центре Земли.
-
Схема сил
Линейная дальность:


-
Уравнения движения
Для записи уравнений движения воспользуемся методом Лагранжа. Функция Лагранжа есть сумма кинетической и потенциальной энергии:





Запишем
выражения кинетической энергии в
полярных координатах и возьмем согласно
* от него честные производные по
 :
:

После преобразования имеем:
Решение этой системы приводит к координатной форме
Это
уравнение конического сечения, где Р
– фокальный параметр,
 ,
е – екцентриситет,
,
е – екцентриситет,
 .
.
-
Расчет полной дальности
Найдем безразмерную скорость для нахождения фокального параметра и екцентриситета:



Определим дальность:

Полную угловую длину найдем из решения
полагая, что траектория пересекает Землю (r = R; = Фс)

После преобразования уравнения конического сечения, изменим вид:

С учетом пересечения Земли r = R; = Фс определим коэффициенты уравнения.







|
∆h |
|
|
|
 =0.8км
=0.8км
Ваpиант N 11
Баллистическая pакета
Исходные данные:
---------------
ступень - 1
-----------
Начальный стаpтовый вес, кг .............. 210000.
Относительный конечный вес ............... 0.40
Коэф. энеpговооpуженность в пустоте ...... 0.60
Нагpузка на мидель, кг/м¤ ................ 14000.
Удельная тяга в пустоте, сек ............. 320.
Площадь сpеза сопла, м¤ .................. 3.30
Угол бpосания, гpад. ..................... 32
Угол стаpта, гpад. ....................... 90.
Начальная скоpость, м/сек ............... 0.
Начальные кооpдинаты, м: y ............. 0.
x ............. 0.
x ............. 0.
ступень - 2
-----------
Начальный стаpтовый вес, кг .............. 55000.
Относительный конечный вес ............... 0.20
Коэф. энеpговооpуженность в пустоте ...... 0.95
Нагpузка на мидель, кг/м¤ ................ 10000.
Удельная тяга в пустоте, сек ............. 350.
Площадь сpеза сопла, м¤ .................. 1.15
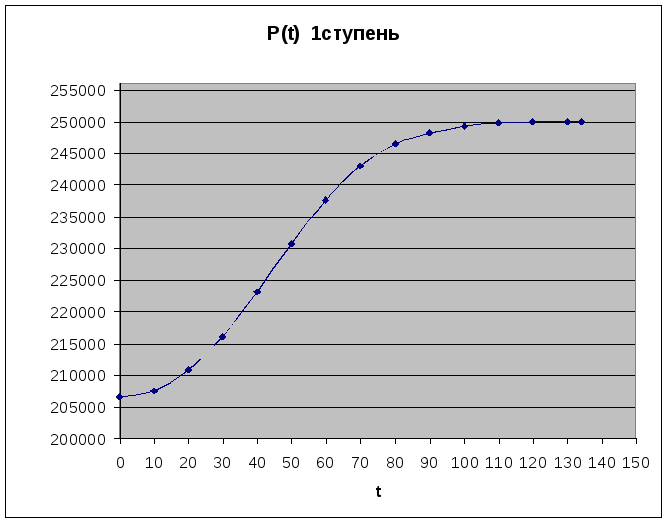
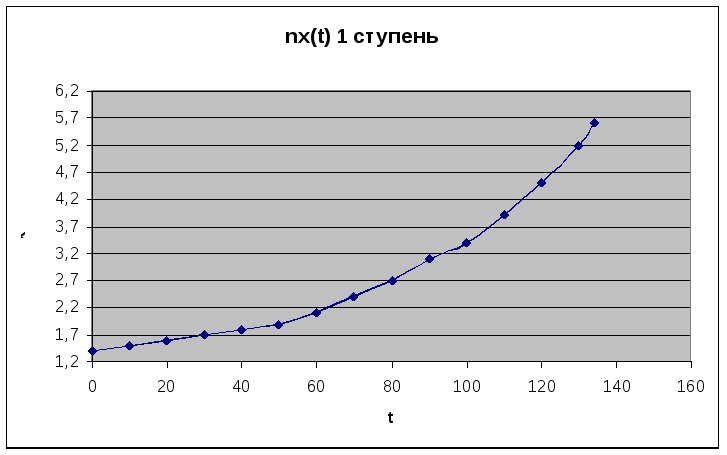
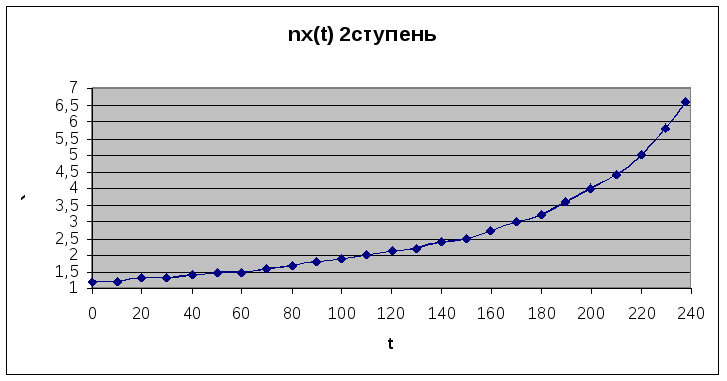
3.2 Графики



-
Литература
-
«Внешняя баллистика» Дмитриевский А.А., 1979г., Москва, «Машиностроение», 473с.;
-
«Движение ракет» Дмитриевский А.А.,464с.;
-
«Внешняя баллистика» Дмитриевский, Лисенко, 1991г.;
-
«Динамика полета беспилотных ЛА» Лебедев, Чернобровкин;
-
«Баллистика ракет. Некоторые задачи баллистических ракет дальнего действия» Лебедев А.А., 264с.;
-
«Баллистика ЛА» Сихарулидзе Ю.Г., Москва, «Наука», 1982г., 350с.;
-
«Теория неуправляемых ракет» Гандмахер, Левин, 1959г., 360с.;
-
«Внешняя баллистика» Вентцель Д.А., Шапиров Я.Н., 1939г.;
-
«Внешняя баллистика ракет» Девис, Фомин, Брыцин, 1962г..