

Задание № 7-Аналитическая динамика
.pdfИсследование движения механической системы с двумя степенями свободы методами аналитической механики
Индивидуальное задание по теоретической механике
Задана механическая система с двумя степенями свободы, подчиненная идеальным удерживающим связям. Все нити являются нерастяжимыми, пружины линейно деформируемые. Качение цилиндров по рейкам и плоскостям происходит без проскальзывания. Движение системы происходит в однородном поле тяжести, сопротивления отсутствуют. Массами нитей и пружин пренебречь. Обобщенные координаты указаны на рисунке. Предполагается, что в положении устойчивого равновесия системы обобщенные координаты равны нулю.
1.Составить уравнения Лагранжа второго рода.
2.Составить канонические уравнения Гамильтона.
3.Определить собственные частоты колебаний системы около положения равновесия.
4.Определить коэффициенты формы и построить общее решение дифференциальных уравнений колебаний.
5.Определить закон движения системы в случае, когда в начальный момент времени обобщенные координаты получают заданные отклонения от нулевых значений, а скорости точек системы в начальный момент времени равны нулю.
1 |
φ |
|
x |
c1 |
c2 |
|
3 |
2 |
|
Вариант № 1
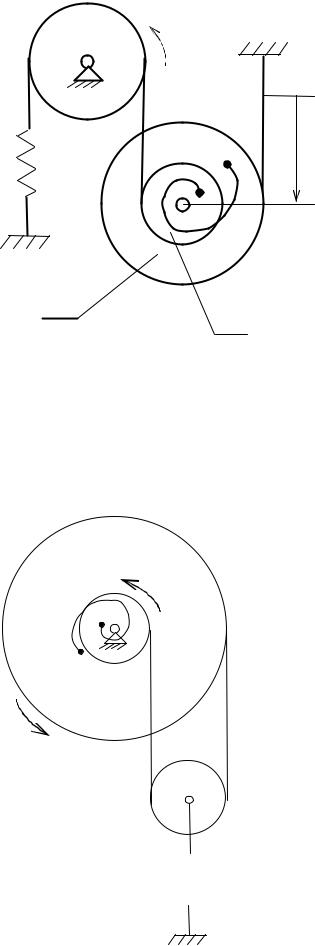
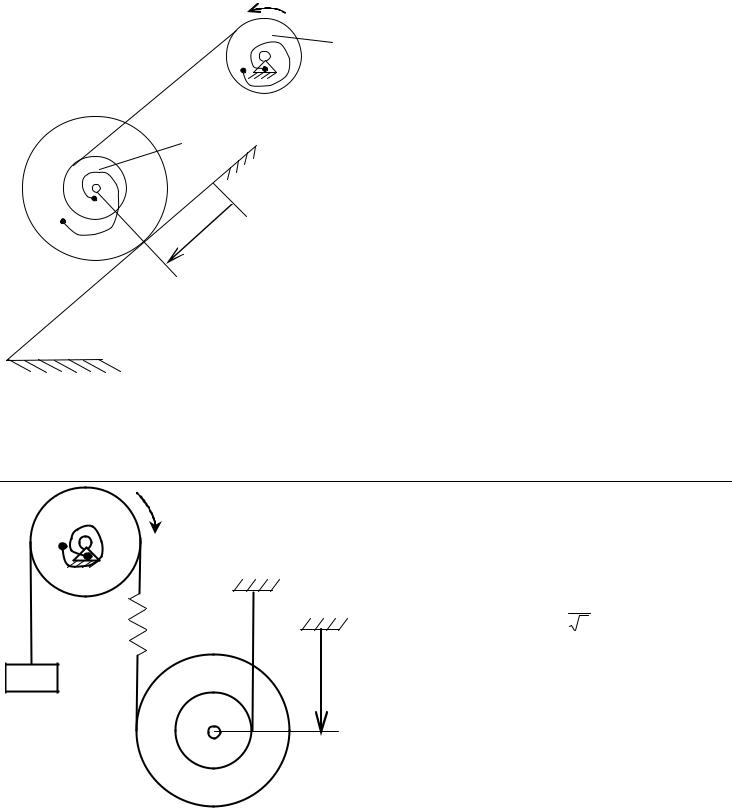
Однородные цилиндры 2 и 3, соединенные спиральной пружиной, могут вращаться вокруг своей общей горизонтальной оси независимо друг от друга. Обобщенная координата x задает положение этой оси. Однородный цилиндр 1 радиуса R вращается около своей неподвижной горизонтальной оси. Обобщенная координата φ представляет собой угол поворота цилиндра 1.
Радиусы цилиндров 2 и 3 связаны соотношением
R3 = 2R2 .
Массы тел связаны равенствами m1 = m2 = 2m3 .
Жесткости пружин представить в виде
c = |
1 m k 2 |
, |
c |
|
= m R2k 2 |
, |
||||
1 |
2 |
1 |
0 |
|
|
2 |
1 |
2 |
0 |
|
где k0 – заданная величина.
|
|
|
Вариант № 2 |
|
|
|
|
|
|
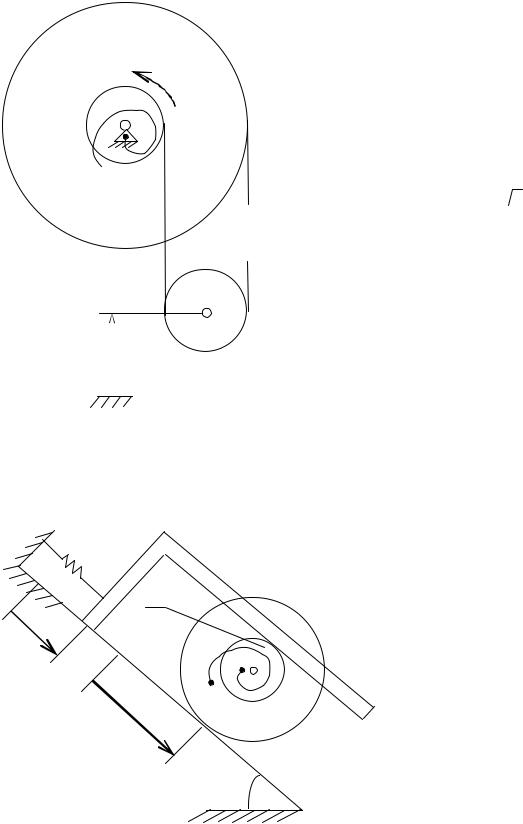
Цилиндры 1 и 2, соединенные спиральной |
|||
|
|
φ1 |
пружиной, могут вращаться вокруг своей |
|||
|
|
общей горизонтальной оси независимо друг от |
||||
|
c1 |
|
друга. |
Обощенные |
координаты |
φ1 ,φ2 |
|
1 |
представляет собой углы поворота цилиндров |
||||
|
|
1 и 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Радиусы однородных цилиндров 1, 2 и 3 |
|||
|
|
|
связаны соотношениями |
|
|
|
|
|
2 |
|
R2 = R1 +2R3 , R2 =3R1 . |
|
|
φ |
|
|
Массы тел связаны равенствами |
|
||
2 |
|
|
m1 = m3 , m2 = 2m3 . |
|
||
|
|
Жесткости пружин представить в виде |
|
|||
|
|
|
|
|||
|
|
3 |
|
c1 = 1 m3R12k02 , |
c2 = m3k02 , |
|
|
|
|
где k0 |
4 |
|
|
|
|
|
– заданная величина. |
|
||
c2 
1 φ
c1 
 c2
c2
2
x
Вариант № 3
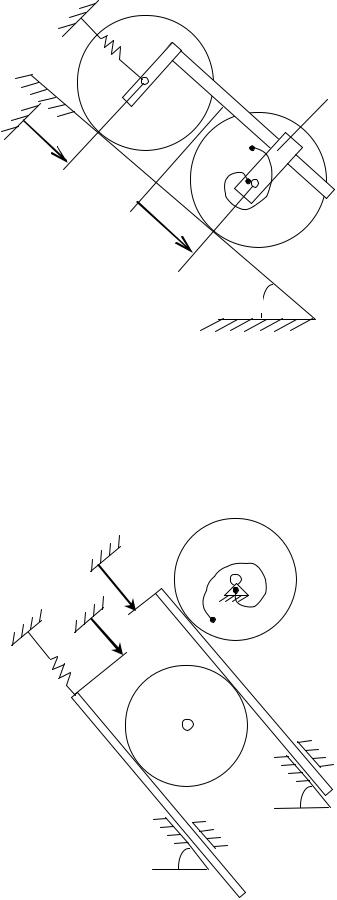
Тело 2 является однородным цилиндром радиуса R. Обобщенная координата x задает положение его горизонтальной оси. Ступенчатый цилиндр 1 вращается около своей неподвижной горизонтальной оси, обощенная координата φ представляет собой его угол поворота.
Радиусы ступенчатого цилиндра 1 равны R и 3R, его радиус инерции относительно оси
вращения iω1 =  2R .
2R .
Массы тел связаны равенством m2 = 2m1 . Жесткости пружин представить в виде
c = m R2k 2 |
, |
c |
|
= |
1 m k 2 |
, |
||||
1 |
1 |
0 |
|
|
2 |
|
8 |
1 |
0 |
|
где k0 – заданная величина.
|
|
|
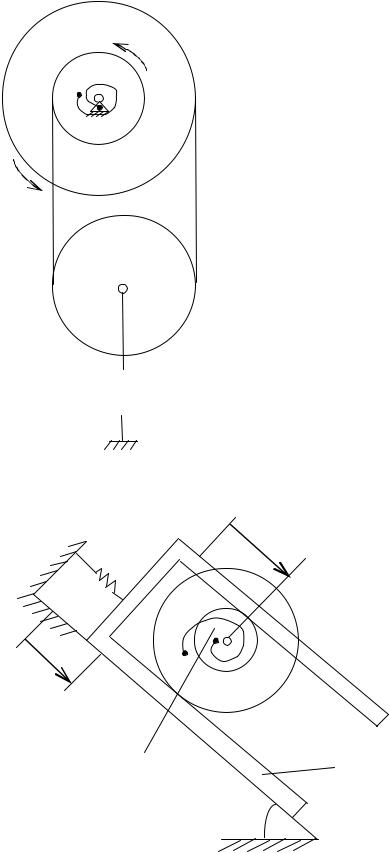
Вариант № 4 |
1 |
|
|
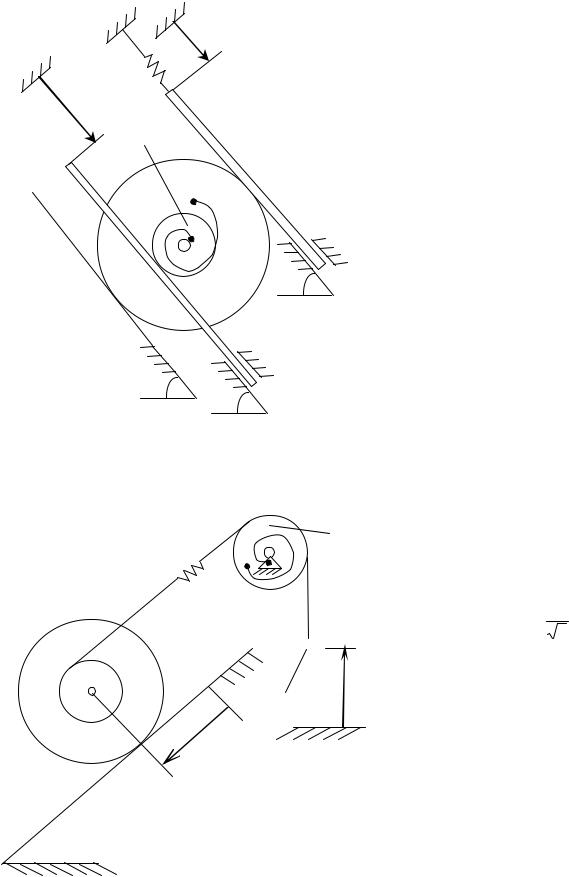
Однородные цилиндры 2 и 3, соединен- |
c1 |
|
ные спиральной пружиной, могут вращаться |
|
2 |
|
|
вокруг своей общей горизонтальной оси |
|
|
независимо друг от друга. Обобщенная |
|
|
|
|
координата x1 задает положение рейки 1, обоб- |
x1 |
|
щенная координата x2 задает положение общей |
|
|
оси цилиндров. |
||
c |
|
Радиусы цилиндров 2 и 3 связаны соотно- |
|
3 |
шением R3 = 2R2 . Массы тел связаны равен- |
||
2 |
|
ствами |
|
x2 |
|
||
|
|
|
m1 = m2 =3m3 . |
|
|
|
Жесткости пружин представить в виде |
|
|
|
c1 = m1k02 , c2 = m1R22k02 , |
|
α |
|
|
|
|
|
где k0 – заданная величина. |
|
|
|
Вариант № 5 |
|
|
|
|
|
|
|
|
Однородные цилиндры 1 и 2 катятся без |
|||||
|
c1 |
|
проскальзывания по наклонной плоскости. К |
|||||
1 |
|
оси цилиндра 1 при помощи цилиндрического |
||||||
3 |
4 |
шарнира присоединена рейка 3, по которой |
||||||
|
скользит ползун |
4, |
шарнирно |
связанный с |
||||
|
|
|
осью цилиндра 2. Ползун 4 и цилиндр 2 соеди- |
|||||
x |
|
|
нены спиральной пружиной. |
|
|
|||
2 |
|
Обобщенная координата x задает положе- |
||||||
|
|
ние оси цилиндра 1. Обобщенная координата s |
||||||
|
|
|
задает положение оси цилиндра 2 относи- |
|||||
|
c2 |
|
тельно рейки 3. |
|
|
|
|
|
|
|
Радиусы цилиндров 1 и 2 одинаковы и |
||||||
|
s |
|
равны R. Массы тел связаны равенствами |
|||||
|
|
|
m = m , |
m = m = |
1 m . |
|||
|
|
|
1 |
2 |
3 |
4 |
2 |
1 |
αЖесткости пружин представить в виде
c1 = m1k02 , c2 = m1R2k02 ,
где k0 – заданная величина.
|
|
Вариант № 6 |
|
4 |
Однородный цилиндр 3, ось которого го- |
x2 |
ризонтальна, зажат между рейками 1 и 2, дви- |
|
c |
жущимися в наклонных направляющих. Обоб- |
|
|
2 |
щенные координаты x1, x2 задают положения |
x1 |
|
реек. Однородный цилиндр 4 вращается |
|
вокруг своей неподвижной горизонтальной |
|
|
|
оси. |
c1 |
|
Радиусы цилиндров 3 и 4 одинаковы и |
2 |
равны R. Массы тел связаны равенствами |
|
|
m1 = m2 , m3 =8m1 , m4 = 2m1 . |
|
|
3 |
Жесткости пружин представить в виде |
1 |
c1 = 3m1k02 , c2 = 2m1R2k02 , |
|
|
α |
где k0 – заданная величина. |
|
|
α
|
|
Вариант № 7 |
|
|
|
|
|
|
|
|
x1 |
Однородные цилиндры 3 и 4, соединен- |
|||||||
|
ные спиральной пружиной, могут вращаться |
||||||||
|
c1 |
вокруг своей общей оси независимо друг от |
|||||||
x2 |
друга. Рейки 1 и 2 движутся в наклонных на- |
||||||||
правляющих. Обобщенные координаты x1, x2 |
|||||||||
|
1 |
задают положения реек. |
|
|
|
||||
|
4 |
Радиусы цилиндров 3 и 4 связаны соотно- |
|||||||
|
шением R3 = 2R4 . Массы тел связаны равен- |
||||||||
|
|
||||||||
2 |
|
ствами |
|
|
|
|
|
|
|
c2 |
m1 = m2 , m3 = m4 = 2m1 . |
||||||||
|
Жесткости пружин представить в виде |
||||||||
|
c = m k 2 , |
c |
2 |
=8m R2k 2 , |
|||||
|
|
1 |
1 |
0 |
|
1 |
4 |
0 |
|
3 |
|
α |
где k0 – заданная величина. |
|
|
||
|
|
|
|
|
α |
α |
|
|
|
|
|
|
|
|
Вариант № 8 |
|
|
|
|
|
|
|
c1 |
2 |
Тело 2 является однородным цилиндром |
|||||||
|
|
|
радиуса R. Радиусы ступенчатого цилиндра 3 |
|||||||
|
c2 |
|
|
равны a и 2a. Радиус инерции ступенчатого |
||||||
|
|
|
цилиндра 3 относительно его оси |
|
||||||
|
|
|
|
|
i |
|
= |
|
a . |
|
|
|
|
|
|
ω3 |
|
|
2 |
|
|
|
|
|
|
Массы тел связаны равенствами |
|
|||||
|
1 |
|
y |
|
m2 = 2m1 , m3 =3m1 . |
|
||||
3 |
|
Жесткости пружин представить в виде |
||||||||
|
|
|
c = 2m k 2 |
, c |
2 |
= m R2k 2 , |
||||
|
|
|
|
1 |
1 |
0 |
|
1 |
0 |
|
|
x |
|
|
где k0 – заданная величина. |
|
|||||
|
|
|
Обобщенная координата x задает положе- |
|||||||
|
|
|
|
|||||||
|
|
|
|
ние оси ступенчатого цилиндра 3, обобщенная |
||||||
|
|
|
|
координата y задает положение груза 1. |
||||||
 α
α
|
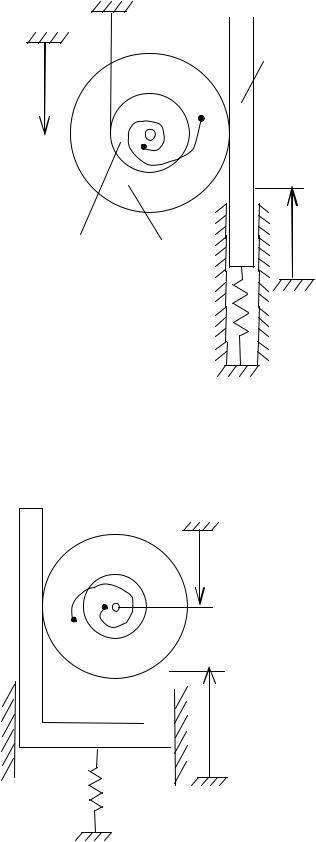
|
Вариант № 9 |
|
φ |
Цилиндры 2 и 3, соединенные спиральной |
|
|
|
c1 |
1 |
пружиной, могут вращаться независимо друг |
от друга вокруг своей общей оси, положение |
||
|
|
которой задается обобщенной координатой x. |
|
|
Обобщенная координата φ представляет собой |
|
|
угол поворота цилиндра 1. |
2 |
|
Радиусы однородных цилиндров 1, 2 и 3 |
|
задаются равенствами |
|
3 |
|
R1 = R2 = R , R3 = 2R . |
|
|
Массы тел связаны соотношениями |
c2 |
|
m1 = m2 , m3 = 2m1 . |
|
Жесткости пружин представить в виде |
|
x |
|
c1 = m1R2k02 , c2 = m1R2k02 , |
|
|
где k0 – заданная величина. |
 α
α
φ
c2 1
|
c1 |
3 |
x |
|
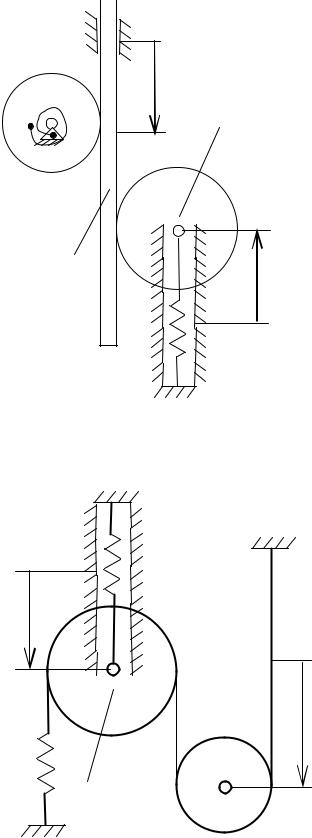
Вариант № 10
Тело 1 является однородным цилиндром радиуса R. Радиусы ступенчатого цилиндра 2 равны 0,5R и 2R. Радиус инерции ступенчатого цилиндра 2 относительно его оси
iω2 = R2 .
Массы тел связаны соотношениями m1 = m2 , m1 = 2m3 .
Жесткости пружин представить в виде
|
c = m k 2 |
, c |
2 |
= 2m R2k 2 |
, |
|||
|
1 |
1 |
0 |
|
1 |
0 |
|
|
2 |
где k0 – заданная величина. |
|
|
|||||
Обобщенная координата x задает положе- |
||||||||
ние оси ступенчатого цилиндра 2, обобщенная координата φ представляет собой угол поворота цилиндра 1.
|
Вариант № 11 |
|
|
|
|
|
|
|
|
|
φ1 |
Цилиндры 1 и 2 вращаются вокруг общей |
|||||||||
неподвижной оси независимо друг от друга. |
||||||||||
1 |
Обобщенные координаты ϕ1 , ϕ2 представляют |
|||||||||
c2 |
собой углы поворота этих цилиндров. |
|||||||||
Радиусы однородных цилиндров 1, 2 и 3 |
||||||||||
|
связаны соотношениями |
|
|
|
|
|||||
2 |
R1 +R2 = 2R3 , R2 = 2R1 . |
|||||||||
Массы тел связаны равенствами |
|
|
||||||||
φ2 |
m2 =3m1 , m3 = 2m1 . |
|
||||||||
Жесткости пружин представить в виде |
||||||||||
|
c = |
1 m k 2 |
, c |
|
= 1 m R2k 2 , |
|||||
|
1 |
4 |
1 |
0 |
|
2 |
4 |
1 |
1 |
0 |
где k0 – заданная величина.
3
c1 
|
|
|
|
|
Вариант № 12 |
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
Однородные цилиндры 2 и 3, соединен- |
||||||||||
|
c1 |
|
ные спиральной пружиной, могут вращаться |
|||||||||||
|
|
|
|
|
независимо друг от друга вокруг своей общей |
|||||||||
|
c2 |
|
оси, положение которой относительно рейки 1 |
|||||||||||
|
|
задается обобщенной координатой |
x2 . Обоб- |
|||||||||||
|
|
|
|
|
щенная координата |
x1 |
определяет положение |
|||||||
x1 |
|
|
|
|
рейки 1 на наклонной плоскости. |
|
|
|
||||||
3 |
|
|
|
Радиусы цилиндров 2 и 3 связаны |
||||||||||
|
|
|
|
соотношением |
R3 = 2R2 . |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Массы тел связаны соотношениями |
|
|
|||||||
|
2 |
|
|
1 |
|
|
m1 =3(m2 +m3 ). |
|
|
|
||||
|
|
|
Жесткости пружин представить в виде |
|
||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
c = (m +m )k 2 , c |
2 |
= (m +m )R2k 2 , |
|||||||
|
|
α |
|
|
1 |
2 |
3 |
0 |
|
2 |
3 |
3 |
0 |
|
|
|
|
|
где k0 – заданная величина. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Вариант № 13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рейка 1 зажата между однородными ци- |
|||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
линдрами 2 и 4. Ползун 3 соединен с цилинд- |
|||||||||
|
|
|
|
|
|
ром 2 при помощи цилиндрического шарнира. |
|||||||||
c2 |
4 |
|
x1 |
Обобщенная координата |
x1 |
определяет поло- |
|||||||||
|
жение |
рейки |
1, |
обобщенная |
координата x2 |
||||||||||
|
|
|
|
||||||||||||
|
3 |
||||||||||||||
|
задает положение оси цилиндра 2. |
||||||||||||||
|
|
|
|
|
|
Радиус цилиндра 4 равен R. Массы тел |
|||||||||
|
|
|
|
|
|
связаны равенствами |
|
|
|
|
1 m . |
||||
|
|
|
|
|
|
|
m = m = m , |
m = |
|||||||
|
2 |
|
|
|
1 |
|
2 |
4 |
|
3 |
|
2 |
1 |
||
|
|
|
Жесткости пружин представить в виде |
||||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
c = m k 2 , c |
2 |
= |
1 m R2k 2 , |
|||||
|
1 |
|
|
|
|
где k0 |
1 |
1 |
0 |
|
2 |
1 |
|
0 |
|
|
|
|
|
x2 |
– заданная величина. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1
|
|
|
|
Вариант № 14 |
|
|
|
|
|
|
|
|
|
Тела 1 и 2 являются однородными ци- |
|||||
|
|
|
c2 |
линдрами, положения осей которых задаются |
|||||
|
|
|
обобщенными координатами |
x1 , x2 . Ползун 3 |
|||||
x2 |
|
|
|
соединен с цилиндром 2 при помощи |
|||||
|
|
|
цилиндрического шарнира. |
|
|
||||
|
|
|
|
Массы тел связаны равенствами |
|||||
|
|
|
|
||||||
|
|
|
|
m = m |
, |
m = |
1 m . |
||
|
2 |
|
|
1 |
2 |
|
3 |
2 |
1 |
|
|
|
Жесткости пружин представить в виде |
||||||
|
|
|
|||||||
|
|
|
x1 |
|
1 |
2 |
|
|
2 |
|
|
|
c1 = |
4 m1k0 |
, c2 = m1k0 , |
||||
c1 |
|
|
|
где k0 – заданная величина. |
|
|
|||
3 |
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
Вариант № 15 |
|
|
|
|
Цилиндры 2 и 3, соединенные спиральной |
|
1 |
пружиной, могут вращаться независимо друг |
||
x2 |
от друга вокруг своей общей оси, положение |
|||
c |
которой задается обобщенной координатой x2 . |
|||
Обобщенная координата x1 определяет поло- |
||||
|
2 |
|
|
жение рейки 1. |
|
|
|
|
|
|
|
|
|
Радиусы однородных цилиндров 2 и 3 |
|
|
|
|
|
|
|
|
|
связаны равенством R3 =3R2 . Массы тел |
связаны соотношениями
m1 = m3 , m2 =3m3 .
Жесткости пружин представить в виде
2 3 x1 c1 = 12 m1k02 , c2 = 12 m1R32k02 ,
где k0 – заданная величина.
c1
|
|
|
|
Вариант № 16 |
|
|
|
|
|
|
|
|
|
|
|
|
Цилиндры 2 и 3, соединенные спиральной |
||||||||
|
|
|
|
|||||||||
|
2 |
|
x2 |
пружиной, могут вращаться независимо друг |
||||||||
c2 |
|
от друг вокруг своей общей оси, положение |
||||||||||
|
|
|||||||||||
|
|
которой задается обобщенной координатой x2 . |
||||||||||
|
|
|
|
Обобщенная координата |
|
x1 определяет поло- |
||||||
|
|
|
|
жение рейки 1. |
|
|
|
|
|
|
|
|
|
3 |
|
|
Радиусы однородных цилиндров 2 и 3 |
||||||||
|
|
|
связаны равенством |
R3 |
= 2R2 . |
|
Массы тел |
|||||
|
|
|
|
|
||||||||
1 |
|
|
|
связаны соотношением |
|
|
|
|
|
|
||
|
|
x1 |
|
m2 +m3 |
= 2m1 . |
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
Жесткости пружин представить в виде |
|||||||||
|
|
|
|
c = m k 2 , |
c |
2 |
= 1 m R2k 2 , |
|||||
|
|
|
|
|||||||||
c1 |
|
|
|
1 |
1 |
0 |
|
9 |
1 |
3 |
0 |
|
|
|
|
где k0 – заданная величина. |
|
|
|
||||||
x1 |
c2 |
x |
|
|
2 |
|
c1 |
1 3
2
Вариант № 17
Ступенчатый цилиндр 3 зажат между рейками 1 и 2, которые двигаются в вертикальных направляющих. Обобщенные координаты x1 , x2 задают подожения реек.
Радиусы ступенчатого цилиндра 3 равны a и 2a. Радиус инерции ступенчатого цилиндра 3 относительно его оси iω3 = a . Массы
тел связаны соотношениями
m1 =3m3 , m2 = m3 .
Жесткости пружин представить в виде
c1 = m3a2k02 , c2 = 91 m3k02 ,
где k0 – заданная величина.
2 |
φ2 |
φ1 |
1 |
||
|
c2 |
1 |
|
|
4
3
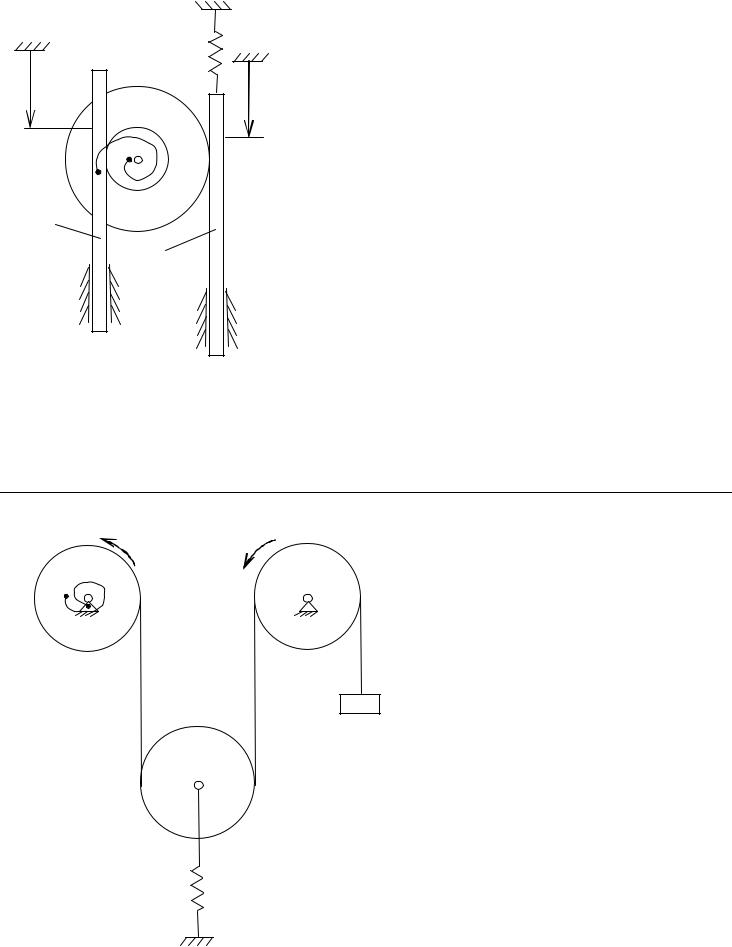
Вариант № 18
Цилиндры 1 и 2 вращаются около своих неподвижных горизонтальных осей. Обобщенные координаты ϕ1 , ϕ2 представляют собой
углы поворота этих цилиндров.
Радиусы однородных цилиндров 1, 2, 3 одинаковы и равны R. Массы тел связаны соотношениями
m1 = m2 = m4 , m3 = 2m1 .
Жесткости пружин представить в виде
c1 = m1k02 , c2 = 14 m1R2k02 ,
где k0 – заданная величина.
c1