

Шаблон поправки
Д

В пределах одной декады ЛАЧХ вокруг частоты с претерпевает наибольшие изменения. Шаблон таких изменений уже вычислен и приведен в литературе.
Порядок построения лачх апериодического звена
Строим асимптотический ЛАЧХ.
Выбирается шаблон поправки, ось ординат которого совмещается с частотой среза асимптотической ЛАЧХ.
По данному шаблону вносятся изменения в асимптотическую ЛАЧХ.
Примеры апериодических звеньев

Колебательное звено
Динамика процессов в колебательном звене описывается уравнением:
![]() ,
,
где
k
коэффициент усиления звена; Т
постоянная времени колебательного
звена;
![]()
коэффициент демпфирования звена (или
коэффициент затухания).
коэффициент демпфирования звена (или
коэффициент затухания).
В зависимости от величины коэффициента демпфирования различают четыре типа звеньев:
а)
колебательное 0<![]() <1;
<1;
б)
апериодическое звено II
порядка![]() >1;
>1;
в)
консервативное звено
![]() =0;
=0;
г)
неустойчивое колебательное звено
![]() <0.
<0.
1. Переходная характеристика колебательного звена:

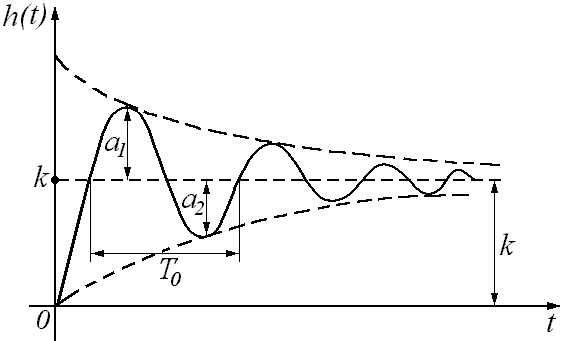
Амплитуды
первых двух колебаний определяют
величину -![]() .
.
Чем ближе коэффициент затухания к единице, тем меньше амплитуда колебаний, чем меньше Т, тем быстрее устанавливаются переходные процессы.


При >1 колебательное звено называется апериодическим звеном второго порядка (последовательное соединение двух апериодических звеньев с постоянными времени Т1 и Т2).
c ![]()

![]() .
.
Здесь
0
– величина, обратная постоянной времени
(![]() );
);![]() .
.
Такое звено в литературе называют консервативным звеном.
![]()

Все переходные характеристики будут колебаться вдоль величины k.
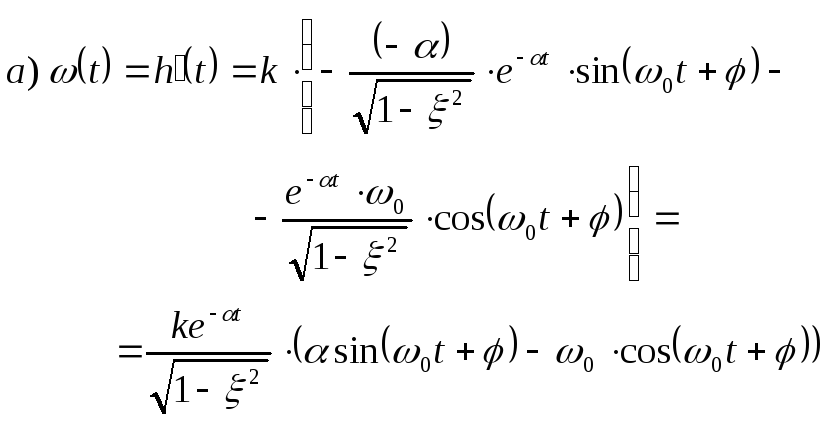
2. Импульсная переходная характеристика:



![]()

3


4.АФХ:
![]()

График АФХ будет выглядеть следующим образом:
Это характеристика для колебательного звена и для апериодического звена второго порядка.
Для
апериодического звена -
![]() .
.
А в случае б) формула АФХ совпадает со случаем а).
![]()

- АФХ для консервативного звена.
5

![]() .
.
АЧХ
при частоте
![]() имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
![]() .
.
Отсюда видно, что, чем меньше коэффициент , тем больше резонансный пик.
![]()
Т

6.ФЧХ:


Для случая б) график будет аналогичным, только перегиб будет чуть меньше (штриховая линия на графике).
![]()

7.ЛАЧХ:
![]() ,
где
,
где
![]()
Асимптотическая ЛАЧХ колебательного звена:

Определяем наклон на втором участке:

Шаблон к графику а) дается от 0 до 1 шагом в 0,1.
К


Структурная схема колебательного звена будет выглядеть следующим образом:
![]()

Примером колебательного звена является любая RLc- цепь.
Идеальное интегрирующее звено
Динамика интегрирующего звена описывается дифференциальным уравнением
![]() .
.
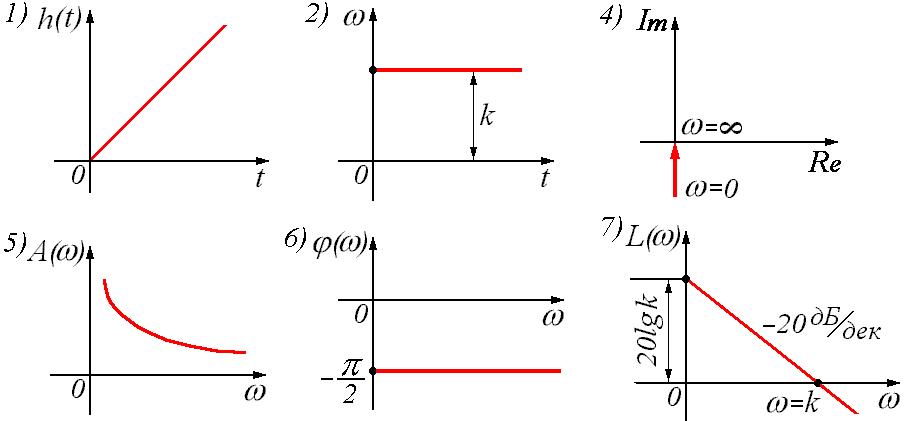
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика (или функция веса) имеет вид:
![]()
3. Передаточная функция идеального интегрирующего звена:
![]()
4. АФХ звена:
![]()
на комплексной плоскости изображается в виде прямой, совпадающей с мнимой осью.
5. АЧХ:
![]()
представляет
собой гиперболу, которая при
![]() стремится к бесконечности. При увеличении
частоты значенияА()
стремятся к нулю. Это свойство сближает
интегрирующие звенья с инерционными.
стремится к бесконечности. При увеличении
частоты значенияА()
стремятся к нулю. Это свойство сближает
интегрирующие звенья с инерционными.
6. ФЧХ идеального интегрирующего звена:

показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен
-900.
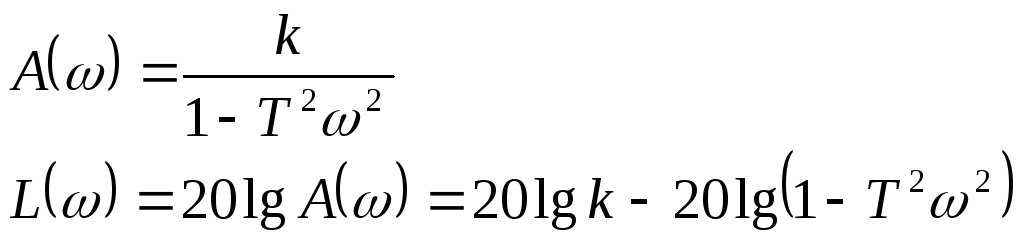
7. ЛАЧХ:
![]()
представляет собой прямую с наклоном –20дБ/декаду, проходящую через точку с координатами =1, L()=20lgk.
П
И

![]() ,
,
где S – площадь поверхности жидкости (м2), а коэффициент k – выражением
![]() .
.
Идеальных интегрирующих звеньев в реальных объектах практически не существует.