

1.1.3 ПротоколNmea0183
GPS модули выбранных трекеров отсылают информацию управляющему устройству в формате протокола NMEA 0183. NMEA 0183 - текстовый протокол связи морского (как правило, навигационного) оборудования (или оборудования, используемого в поездах) между собой. GPS модуль отсылает множество строчек в формате данного протокола, но в данном проекте меня интересует лишь RMC строка, которая представляет собой «рекомендуемый минимум навигационных данных».
Формат RMC строки: $GPRMC,hhmmss.ss,A,GGMM.MM,P,gggmm.mm,J,v.v,b.b,ddmmyy,x.x,n,m*hh<CR><LF>
Значение полей:
«GP» — идентификатор источника; в приведенном примере это GPS
«RMC» — «Recommended Minimum sentence C» («рекомендуемый минимум навигационных данных»)
«hhmmss.ss» — время фиксации местоположения по Всемирному координированному времени UTC: «hh» — часы, «mm» — минуты, «ss.ss» — секунды. Длина дробной части секунд варьируется. Лидирующие нули не опускаются.
«A» — статус: «A» — данные достоверны, «V» — недостоверны.
«GGMM.MM» — широта. 2 цифры градусов(«GG»), 2 цифры целых минут, точка и дробная часть минут переменной длины. Лидирующие нули не опускаются.
«P» — «N» для северной или «S» для южной широты.
«gggmm.mm» — долгота. 3 цифры градусов(«ggg»), 2 цифры целых минут, точка и дробная часть минут переменной длины. Лидирующие нули не опускаются.
«J» — «E» для восточной или «W» для западной долготы.
«v.v» — горизонтальная составляющая скорости относительно земли в узлах. Число с плавающей точкой. Целая и дробная части переменной длины.
«b.b» — путевой угол (направление скорости) в градусах. Число с плавающей точкой. Целая и дробная части переменной длины. Значение равное 0 соответствует движению на север, 90 — восток, 180 — юг, 270 — запад.
«ddmmyy» — дата: день месяца, месяц, последние 2 цифры года (ведущие нули обязательны).
«x.x» — магнитное склонение в градусах (часто отсутствует), рассчитанное по некоторой модели. Число с плавающей точкой. Целая и дробная части переменной длины.
«n» — направление магнитного склонения: для получения магнитного курса магнитное склонение необходимо «E» — вычесть, «W» — прибавить к истинному курсу.
«m» — индикатор режима: «A» — автономный, «D» — дифференциальный, «E» — аппроксимация, «N» — недостоверные данные (часто отсутствует, данное поле включая запятую отсутствует в старых версиях NMEA).
«hh» — контрольная сумма.
<CR> — байт равен 0x0D.
<LF> — байт равен 0x0A.
1.1.4 Устройство трекера
Трекер состоит из 3-х блоков:
1) GPS приемник
Задача приёмника – как описано выше, принять сигналы со спутников, определить текущее положение спутиников, определить расстояние до спутников, определить своё местоположение, скорость, направление движения и отправить эти данные на управляющее устройство.
В качестве приёмника в «GPS трекере» выступает GPS модуль Quectel L10. В качестве приёмника в коммуникаторе выступает встроенный в коммуникатор GPS или ГЛОНАСС модуль, у каждого производителя он разный.
2) Передатчик
Задача передатчика – передать полученные данные с приёмника на удалённый сервер в заданном формате.
В качестве передатчика в «GPS трекере» выступает GSM модуль SIM 900D. В качестве передатчика в коммуникаторе выступает встроенный телефонный модуль, у каждого производителя он разный.
3) Управляющее устройство
Задача управляющего устройства – связать в единую систему (трекер) приёмник и передатчик, т.е. принять данный с приёмника и отправить через передатчик на удалённый сервер.
В качестве управляющего устройства в «GPS трекере» выступает микроконтроллер STM32F100. В качестве управляющего устройства в коммуникаторе выступает микроконтроллер производителя устройства.
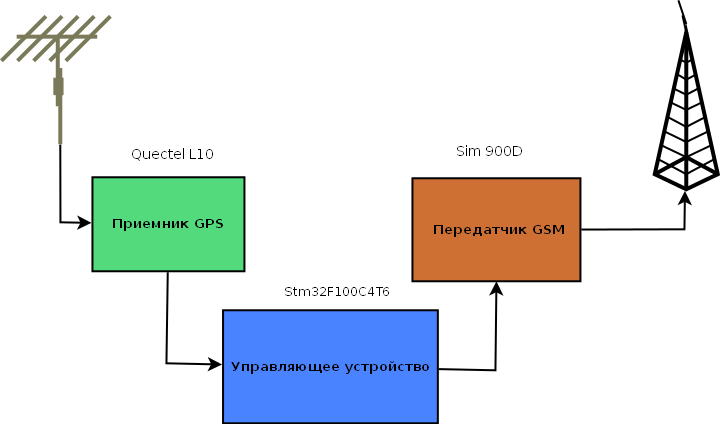
Рис 5. Устройство GPSтрекера