

4. Решение обратной угловой засечки по формулам Пранис-Праневича
В данной задаче
необходимо было вычислить координаты
точки P ,
по координатам трех заданных точек 1
,
по координатам трех заданных точек 1 ,
2
,
2 и
3
и
3 и двум углам
и двум углам и
и (рис. 13).
(рис. 13).
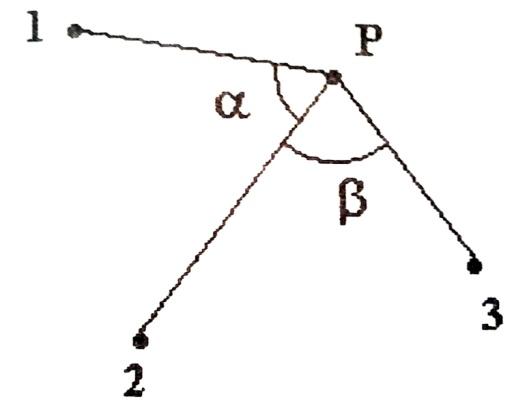
Рис. 13. Схема для вычисления координат по формулам Пранис-Праневича.
Для вычисления координат точки P использовались формулы Пранис-Праневича:
 ,
,
где
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Сначала задача была решена средством МS Excel. Результат представлен на рис. 14.

Рис. 14.Рабочее окно при расчете обратной угловой засечки
по формулам Пранис – Праневича средствами МSExcel
Результат вычисления
координат точки Р
в МS
Excel
приблизительно
 м,
м, м.
м.
Затем решение осуществлялось средствами MathCAD. В результате чего был получен следующий вид вычисления координат точки Р:
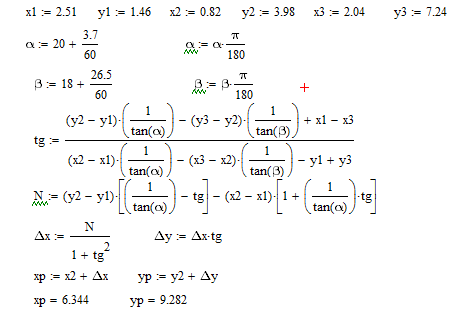
Рис. 14.Рабочее окно при расчете обратной угловой засечки
по формулам Пранис – Праневича в MathCad
Результат оказался
равным
 м,
м, м.
м.
Далее решение выполнялось средствами MatLab. Результат представлен на рис. 15.
Программный код:
clc
x1=input('x1->');
y1=input('y1->');
x2=input('x2->');
y2=input('y2->');
x3=input('x3->');
y3=input('y3->');
ag=input('a(grad)->');
am=input('a(min)->');
bg=input('b(grad)->');
bm=input('b(min)->');
a=ag+am/60;
b=bg+bm/60;
b=b*pi/180;
a=a*pi/180;
tgq =((y2-y1)/tan(a)-(y3-y2)/tan(b)+x1-x3)/((x2-x1)/tan(a)-(x3-x2)/tan(b)-y1+y3);
n=(y2-y1)*(1/tan(a)-tgq)-(x2-x1)*(1+1/tan(a)*tgq);
dx=n/(1+tgq^2);
dy=dx*tgq;
xp=x2+dx
yp=y2+dy

Рис. 14.Рабочее окно при расчете обратной угловой засечки
по формулам Пранис – Праневича в MatLab
Результат
вычисления координат точки Р
в MatLab
 м,
м, м.
м.
Решение данной задачи завершалось вычислением координат точки Р средствами Visual Basic 6.0. Был получен следующий вид решения, результат которого представлен на рис. 16.
Программный код:
Function ctg(x)
ctg=Cos(x) /Sin(x)
EndFunction
PrivateSub Command1_Click()
Cls
X1 = Val(txtx1.Text): Y1 = Val(txty1.Text)
X2 = Val(txtx2.Text): Y2 = Val(txty2.Text)
x3 = Val(txtX3.Text): y3 = Val(txty3.Text)
a = Val(txtag.Text) + Val(txtam.Text) / 60
b = Val(txtbg.Text) + Val(txtbm.Text) / 60
pi = 3.1415926
a = a * pi / 180
b = b * pi / 180
tgq = ((Y2 - Y1) * ctg(a) - (y3 - Y2) * ctg(b) + X1 - x3) / ((X2 - X1) * ctg(a) - (x3 - X2) * ctg(b) - Y1 + y3)
n = (Y2 - Y1) * (ctg(a) - tgq) - (X2 - X1) * (1 + ctg(a) * tgq)
dx = n / (1 + tgq * tgq)
dy = dx * tgq
xp = X2 + dx
yp = Y2 + dy
Print "xp="; xp, "yp="; yp
End Sub
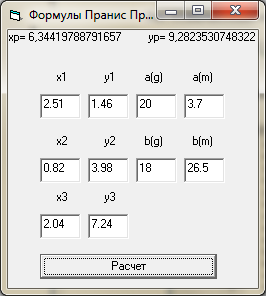
Рис. 14.Рабочее окно при расчете обратной угловой засечки
по формулам Пранис – Праневича в VisualBasic
Результат вычисления
координат точки Р
в Basic
6.0 приблизительно
 м,
м, м.
м.
Заключение
Целью курсовой работы является решение базовых геодезических задач в разных программных продуктах: MS Excel, MathCAD, MatLab, Visual Basic 6.0. Результаты расчетов задач в разных программах совпали, что свидетельствует о правильности вычислений. Для окончательных результатов брались средние значения решений геодезических задач всех программных продуктов. Полученные навыки не заменимы в дальнейших работах в области геодезии.