

Федеральное агентство по образованию
Санкт-Петербургский государственный горный институт
имени Г.В. Плеханова (технический университет)
Кафедра автоматизации технологических процессов и производств
ТЕОРИЯ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Методические указания по курсовой работе
для студентов специальности 210301
САНКТ-ПЕТЕРБУРГ
2010
ВВЕДЕНИЕ
Дисциплина “Теория автоматического управления” для студентов специальности 220301 “Автоматизация технологических процессов и производств (в металлургии)” является специальной дисциплиной, призванной дать студентам знания об общих принципах построения и законах функционирования систем автоматического управления, об основных методах анализа и синтеза таких систем.
Современный уровень общественного производства - использование более совершенной техники и технологии, автоматизация научного эксперимента требуют от будущих инженеров самых различных специальностей приобретения и расширения знаний в области автоматики. Современному инженеру все чаще приходиться использовать в своей научной и практической деятельности теорию и методы проектирования, создания и эксплуатации систем автоматического регулирования и управления.
Необходимый и достаточный объем знаний и умений в этой области позволит инженеру по специальности 220301 “Автоматизация технологических процессов и производств (в металлургии)” свободно ориентироваться в особенностях управления промышленными объектами и правильно их использовать.
В методических указаниях изложены основные сведения о линейных непрерывных системах автоматического регулирования, т.е. охвачен первый раздел теории автоматического регулирования и управления, который имеет весьма большое значение и широко применяется как студентами во время диплом проектировании, так и специалистами в инженерной практике.
Нами в качестве базовых пособий взяты учебные пособия [1, 2, 3].
Кроме предложенных пособий, для изучения дисциплины “Теория автоматического управления” студентам необходимо вспомнить и уметь применять на практике знания по следующим разделам из курса высшей математики: элементы линейной и матричной алгебры, дифференциальное и интегральное исчисление, дифференциальные уравнения, ряды и интеграл Фурье; элементы теории функций комплексного переменного, операционное исчисление, элементы математической статистики, элементы теории вероятностей и теории случайных процессов.
Линеаризация математической модели объекта управления
В качестве предмета изучения в этом и последующих заданиях будем использовать некоторый объект, описываемый дифференциальным уравнением 2-го порядка.:
![]() (1).
(1).
Исходные данные.
В качестве исходных данных служат коэффициенты уравнения (1) аIII, аII, аI, bI ; границы изменения входной переменной Xmin и Xmax.
Для варианта «Пример» эти значения будут: аIII=6; аII=17Y; аI=5Y2Х; bI = 8YX; Xmin=1; Xmax=11. Номинальный режим выбран как ½ диапазона изменения Х (z=1/2).
Задание.
Произвести линеаризацию уравнения объекта управления и уточнить границы изменения Х, чтобы ошибка линеаризации была не более 5% от номинального значения Y.
Метод решения
Перепишем уравнение (1), подставив значения коэффициентов:
![]() (2)
(2)
Это нелинейное уравнение, так как в нем имеется произведение выходной переменной Y на ее производную (динамическая нелинейность), вторая степень входной переменной Х, третья степень выходной переменной Y и произведение входной и выходной переменной (статическая нелинейность).
Для того чтобы можно было пользоваться стандартными методами теории автоматического управления , применительно к данному объекту, необходимо привести это уравнение к виду:
![]() (3),
(3),
где а2 , а1, а0, b – некоторые постоянные коэффициенты.
Уравнение (3) – линейное дифференциальное уравнение. Поэтому процесс приведения к такому виду какого то нелинейного уравнения называют линеаризацией.
Для линеаризации уравнения (2) введем понятие номинального режима: установившегося режима функционирования объекта (производные равны нулю), в котором входная и выходная переменные связываются уравнением статики и каждая имеет какое то определенное постоянное значение. Относительно этих значений рассматриваются величины входных и выходных переменных во время работы объекта управления. Сами значения при номинальном режиме могут определяться из различных соображений: исходя из требований технологического регламента или просто как середина диапазона изменения входной (выходной) величины и т.п.
Найдем уравнение статического режима для объекта (2).
Приравняем нулю все производные в уравнении (2) и получим уравнение статики объекта:
![]() (4)
(4)
Уравнение (4) описывает множество возможных установившихся состояний объекта, в том числе и состояние номинального режима.
Найдем значения переменных при номинальном режиме.
Диапазон изменения Х, как уже было сказано от 1 до 11. Номинальное значение для варианта «Пример» ХН соответствует середине диапазона (z= ½ ), то есть
ХН = Xmin+ z ( Xmax - Xmin )= 1 + 0,5(11-1)=6
По уравнению (3):
![]()
Тогда во всех состояниях значения входной и выходной переменных можно записать, как:
Y = YH + Y ; X = XH + X (5).
Линеаризация производится для режимов, имеющих относительно малое отклонение от номинального режима.
Перенесем правую часть уравнения (2) налево и получим
6YII + 17YIY + 5Y3X + 8YX2 = 0 (6)
Обозначим левую часть уравнения (2) через функцию F:
F = 6YII + 17YIY + 5Y3X - 8YX2 (7)
Разложив ее в ряд Тейлора с учетом всех переменных и производных (производные рассматриваются, как самостоятельные переменные) и отбросить все слагаемые второго и больших порядков, получим :
![]() (8),
(8),
где
FH
– значение F
при номинальном режиме, ![]() ,
,![]() ,
,![]() ,
,![]() -значения производных
по переменным при подставленных
номинальных значениях,
YII
, YI
, Y
, X
- отклонения переменных от номинального
значения .
-значения производных
по переменным при подставленных
номинальных значениях,
YII
, YI
, Y
, X
- отклонения переменных от номинального
значения .
Найдем частные производные, необходимые для разложения:
![]() =
6,
=
6,
![]() =
17YH= 52.673,
=
17YH= 52.673,
![]() =17YIIH+
15(YH)2XH+
8(XH)
2=576 ,
=17YIIH+
15(YH)2XH+
8(XH)
2=576 ,
![]() =5(YH)3
- 16YHXH
= -148.723
=5(YH)3
- 16YHXH
= -148.723
Номинальное значение дифференциального оператора выхода (левой части уравнения) FH= 5(YH)3XH - 8YН(XH)2= 0
Таким образом подставив все это в уравнение (7) получим
F= 0+ 6YII + 52.673YI + 576Y –148.723X
где члены высоких порядков отброшены, а линеаризованное уравнение имеет вид:
6YII + 52.673YI + 576Y = 148.723X (9)
Уравнение (9) является линейным, но описывает объект не в абсолютных физических переменных, а в отклонениях от номинала (приращениях).
Разделим обе части уравнения (9) на коэффициент при Y. Тогда оно примет вид:
а2Y + а1Y + а0Y = kX (10),
где
а2
= 0.01 ,
а1
= 0,091
, а0
= 1 –
коэффициенты ; k
= 0,258 – коэффициент усиления объекта,
Y=![]() и Y=
и Y=![]() - производные.
- производные.
Уравнение (10) является линеаризованным дифференциальным уравнением объекта управления в канонической форме записи. Приведение к такой форме (коэффициент при Y равен 1) - очень важный момент для правильного определения параметров объекта (например, коэффициента усиления).
Линеаризация существенно снижает точность математической модели. Эта потеря точности не должна превысить заданного значения (для варианта «Пример» 5 %).
Уточним интервал изменения Х, в котором данная точность реализуется.
Проверка проводится для статического режима.
При линеаризации кривая, соответствующая уравнению (4) заменяется прямой, получаемой из (10) приравниванием к нулю производных:
Y = 0,258X (11)
Сопоставим характеристики (4) и (11).
Поскольку из уравнения (5) Y=3,098+Y и X=6+X , то можем записать на основании (11):
![]() ,или
,или
![]() (12)
(12)
Ошибку линеаризации можно посчитать по уравнению
=
![]() (13),
(13),
где Yл, Yнл – значения выходной переменной для линеаризованного уравнения (12) и нелиаризонанного уравнения (5).
Подставляя в (5), (12) и (13) различные значения Х, можно найти значения Y для линеаризованного (Yл) и нелинеаризованного уравнения (Yнл). Результаты приведены в таблице.
|
Х |
1 |
2 |
3 |
5 |
6 |
7 |
8 |
10 |
11 |
|
Yл |
1,81 |
2,07 |
2,32 |
2,84 |
3,098 |
3,36 |
3,61 |
4,13 |
4,38 |
|
Yнл |
1,26 |
1,78 |
2,19 |
2,83 |
3,098 |
3,34 |
3,58 |
4 |
4,2 |
|
,% |
17,5 |
8,9 |
4,2 |
0,4 |
0 |
0,3 |
1,2 |
4,2 |
6,2 |
Как видно из таблицы на краях заданного диапазона точность линеаризации не достаточна. Найдем параметры диапазона в котором ошибка не превышала заданного значения 5%. Из уравнения (13) имеем:
![]() =
5
=
5
Откуда
![]() ,
или
,
или
![]()
Решая это уравнение получаем новые значения гарниц интервала. Они будут: YZ1 =2,805 и YZ2 = 10,395.
Построим график (Х).
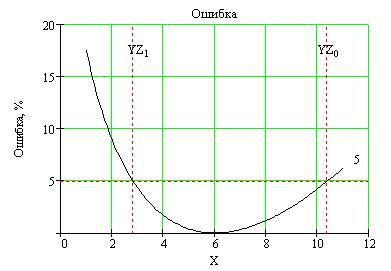
Рис. 1 График ошибки . YZ0 и YZ1 - новые значения границ интервала изменения X.
Построим графики Yл и Yнл, то есть линеаризованной и нелинеаризованной статических характеристик (рис. 2.).
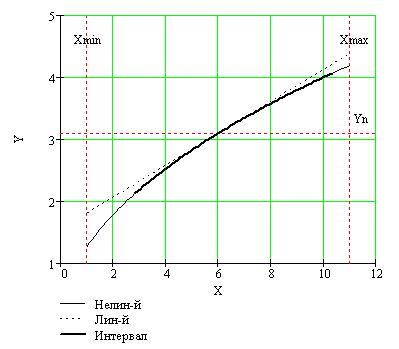
Рис. 2. Нелинейная и линеаризованная статические характеристики. Жирной линией обозначен новый интервал, удовлетворяющий точности 5% ; Xmin и Xmax - заданные значения интервала.
Таким образом, исходное уравнение (1) линеаризуется уравнением вида (10) (сейчас и в дальнейшем знак будет опускаться при записи дифференциальных уравнений в отклонениях) :
0,01Y + 0,091Y + Y = 0,258X,
а требуемая точность линеаризации достигается в интервале изменения входной переменной от 2,805 до 10,395.