

Лекции по физике
.pdfОпыты показали, что под действием сил тела ускоряются, пропорционально силе и обратно пропорционально инерционности тела, которую назвали массой m.
Это второй закон Ньютона.
a = |
F |
или |
F = m a |
(3.1) |
|
m |
|||||
|
|
|
|
Соотношение (3.1) называют уравнением движения материальной точки или основным законом динамики материальной точки.
Т.к. a = dV , а m = const , то (3.1) можно переписать:
dt
= dV = d(m V) = dp
F m
dt dt dt
Вектор p = m V называется импульсом материальной точки.
И мы получаем другую запись второго закона Ньютона: Скорость изменения импульса материальной точки равна действующей на неё силе.
|
|
|
F = |
dp |
(3.2) |
|
dt
Соотношение (3.2) является более общей формулировкой 2-ого закона Ньютона; её можно использовать и для объектов с переменной массой.
Из (3.1) следует, что при условии F = 0 получим: a = 0, т.е. в отсутствии сил тело движется равномерно прямолинейно, или покоится.
Кажется, что первый закон Ньютона следует из 2-ого. Но первый закон Ньютона формулируют отдельно, т.к. в нём содержится утверждение о существование в природе инерциальных систем отсчёта.
Единица измерения силы: [F]=Н=кг м/с2. (H-ньютон).
3.3. Третий закон Ньютона
Взаимодействие тел всегда обоюдное. Это относится как к контактирующим телам, так и к телам, взаимодействующим посредством полей.
Третий закон Ньютона: Силы взаимодействия двух материальных точек i и j равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти материальные точки.
Fij = −Fji |
(3.3) |
3.4.Силы
3.4.1Силы тяготения
Силы тяготения обусловлены взаимным притяжением любых объектов, обладающих массой или энергией. Напомним, что масса и энергия эквивалентны: E=mc2, где с – скорость света в вакууме. Эти силы описываются законом всемирного тяготения:
13
F = G |
m1 m2 |
(3.4) |
|
R2 |
|||
|
|
где m1 и m2 - массы взаимодействующих точечных тел, R - расстояние между телами, G=6.6710-11 Н м2/кг2-гравитационная постоянная.
Тело m на поверхности Земли притягивается по этому же закону, но второе тело – это Земля, имеющая постоянную массу m2=МЗ, и расстояние R до центра Земли можно приблизительно считать постоянным R=RЗ. В этом случае:
|
F = G |
m MЗ |
= m g |
(3.5) |
||
RЗ2 |
||||||
|
|
|
|
|
||
где константу g = |
G MЗ |
≈ 9,8м/с2 |
- называют ускорением |
свободного |
||
|
||||||
|
R2 |
|
|
|||
|
З |
|
|
|||
падения.
Причина такого названия проста: если на тело действует только одна сила тяжести, то уравнение движения имеет вид: m g=m a, и мы получаем a=g, т.е.
G MЗ .
R2З
Итак, на поверхности Земли на все тела действует сила тяготения, равная m g, направленная к центру Земли.
Вес тела это сила, с которой тело за счёт притяжения Земли действует на подвес или опору.
Вес тела не всегда равен m g, а зависит от того, с каким ускорением движется опора вверх или вниз. В частности, если опора движется вниз с ускорением g, то вес тела будет равен нулю. (В свободно падающем лифте или спутнике наступает невесомость).
3.4.2 Силы трения
Силы трения возникают при контакте тел при условии, что они движутся относительно друг друга, или при наличии сил, стремящихся сдвинуть одно тело относительно другого.
Силу трения для тел, движущихся относительно друг друга, (так называемое сухое трение) можно
выразить соотношением: FТР = Fn, где Fn – сила нормального давления, а - коэффициент трения, зависящий от свойств поверхностей.
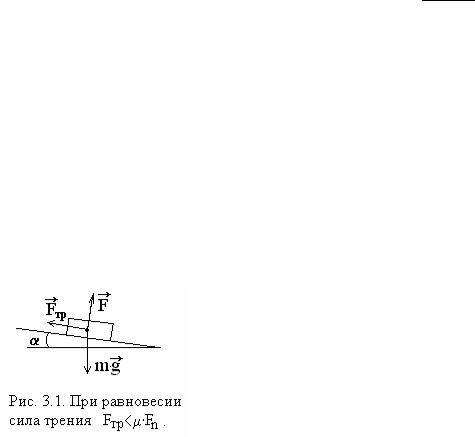
Если же тела не смещаются относительно друг друга, например кирпич на слабо наклонённой доске (рис. 3.1.), то сила трения меньше, чем Fn , а её величина такова, что выполняется условие равновесия тела:
∑Fi = mg+ FТР + Fn = 0
14
При увеличении угла наклона α сила трения растёт до тех пор, пока не станет равной µ Fn . При больших углах наклона сила трения возрастать уже не может, FТР = µ Fn, кирпич начинает двигаться.
3.4.3 Упругие силы
Упругие силы возникают при деформации тел и направлены на восстановление формы тела.
В первом приближении можно считать, что величина упругой силы пропорциональна деформации x . В частности, для пружины: FУПР = -k Δx, где коэффициент k называют жёсткостью пружины.
Лекция 4 . Работа. Потенциальная энергия 4.1. Работа
Ликбез. Скалярное произведение двух векторов a и b обозначают либо
точкой a b, либо |
круглыми скобками: c = (a b). В |
|
результате скалярного |
|||||||
произведения двух |
векторов получается число c = |
|
|
|
|
|
|
|
cosα, где |
α - угол |
|
|
|
|
|||||||
|
|
|||||||||
|
a |
|
|
b |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
между векторами a и b.
Конец ликбеза.
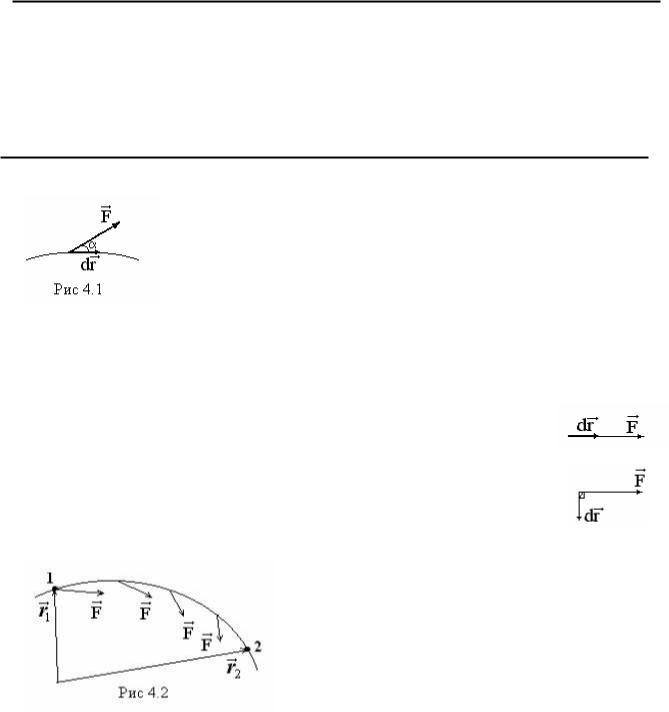
Элементарной работой δА силы |
F при |
малом |
перемещении dr точки, к которой |
приложена |
сила, |
называется скалярное произведение F и dr (Рис 4.1). |
||
δA = (F dr) = F dr Cosα |
|
(4.1) |
(Работа обозначается δA, а не dA, т.к. она не является полным дифференциалом.)
Примеры: а) Пусть сила F и смещение dr направлены в одну сторону:
F dr
Тогда: δA = F dr Cos0 = F dr - работа максимальна.
б) Если сила F перпендикулярна перемещению dr : F dr То: δA = F dr Cos90o = 0 - работа равна нулю.
Работа переменной силы на конечном участке пути от r1 до r2
вычисляется как сумма элементарных работ (интеграл), рис.4.2.
15
r2 |
r2 |
|
|
|
|
A12 = ∫δA = ∫(F dr) |
(4.2) |
|
|
|
|
r1 |
r1 |
|
(криволинейный интеграл по траектории)
Работа, совершаемая за единицу времени, называется мощностью Р:
|
P = δA |
(4.3) |
|
dt |
|
Поскольку dr = V dt , то |
δA = (F dr) = (F V)dt. Отсюда |
следует, что |
мощность равна: |
P = (F V) , |
(4.4) |
где V -скорость
Единица измерения работы: [A]=[F][r]=Нм=Дж (джоуль); Единица измерения мощности: [P]=[F][V]=Нм/c=Дж/c=Вт (ватт).
4.2. Консервативные и неконсервативные силы
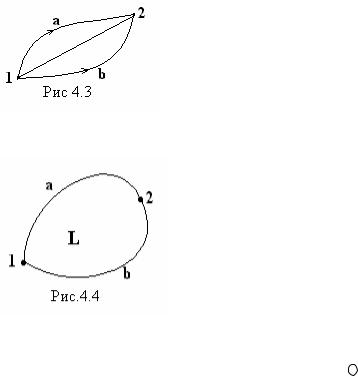
Сила, действующая на материальную точку, называется консервативной или потенциальной, если работа этой силы зависит только от начального и конечного положения материальной точки. (Работа консервативной силы не зависит ни от вида траектории, ни от закона движения точки по траектории). А1А2=А1B2=А12, (рис. 4.3) .
Силы, не удовлетворяющие этому условию называются
неконсервативными.
Для консервативных сил изменение направления движения на противоположное приводит к изменению
знака и для элементарной работы δA = (F dr) и для работы на конечном участке А1А2=-А2А1.
Работа консервативной силы на любом замкнутом контуре равна нулю (рис. 4.4).Покажем это. Поделив замкнутый участок точками 1 и 2,
получим:A1a2b1 = A1a2 + A2b1 = A1a2 − A1b2 = 0.
Таким образом, для любого замкнутого контура L получаем:
|
|
∫(F dr) = 0 |
(4.5) |
L
Примеры консервативныx сил: сила упругости, сила тяжести. Примеры
неконсервативных сил: сила трения (элементарная работа силы трения всегда отрицательна, независимо от направления движения, а работа по замкнутому контуру не равна нулю).
16

4.3. Потенциальная энергия материальной точки
В математике доказывается, что если ∫(F dr) = 0 для любого замкнутого
L
контура L, то (F dr) = -dW, т.е. F dr является полным дифференциалом некоторой скалярной функции координат W(r).
dA = (F dr) = -dW |
(4.6) |
П |
|
В физике эту скалярную функцию WП ( r ) называют потенциальной
энергией
Учитывая (4.6), работу на участке 1-2 можно представить в виде:
r2 |
|
r2 |
|
A12 = ∫ |
(F dr) = −∫dWП = WП (r1) - WП (r2 ) |
(4.7) |
|
r1 |
|
r1 |
|
Итак, работа А12 консервативной силы на участке траектории равна разности потенциальных энергий в начальной и конечной точках.
Если потенциальную энергию в определённой точке пространства принять за нулевую, например WП (r0 ) = 0, то A10 = WП (r1 ) - WП (r0 ) = WП (r1 ).
Получим, что потенциальная энергия материальной точки в данном
положении r равна работе по перемещению материальной точки из положения
r в фиксированное положение r0 .
Поскольку во все физические уравнения входит либо разность потенциальных энергий, либо её производные, то Wп можно определить с точностью до любой константы, поэтому не важно какую точку пространства принять за положение с нулевой потенциальной энергией.
Если задана потенциальная энергия материальной точки WП (r), то легко
найти силу, действующую на точку: |
|
|
|
|
|
|
|
|||||
F |
= − |
∂WП ; |
F = − |
∂WП ; |
|
F = − |
∂WП |
(4.8) |
||||
X |
|
|
∂x |
|
Y |
∂y |
|
Z |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь |
∂ |
означает |
частную |
производную. |
Объединяя (4.8) в одно |
|||||||
|
|
|||||||||||
∂x |
||||||||||||
уравнение , получим: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
∂W |
|
∂W |
|
∂W |
|
|
|
|
F = -grad WП |
≡ − |
П i+ |
П j+ |
П |
k |
|
(4.9) |
||||
|
grad WП (r) |
|
∂x |
|
∂y |
|
∂z |
|
|
|
||
Вектор |
называется |
градиентом и |
является |
вектором, |
||||||||
компоненты которого равны частным производным.
Градиент обладает интересным свойством – он указывает направление самого быстрого роста функции WП.
17

4.4. Потенциальная энергия системы материальных точек
Конфигурацией системы материальных точек называется совокупность положений каждой точки системы.
Если силы, действующие на точки системы, зависят только от ее конфигурации, и сумма работ этих сил, при изменении конфигурации не зависит от пути перехода, а определяется только начальной и конечной конфигурацией, то такие силы называют консервативными.
В такой системе можно ввести понятие потенциальной энергии системы, при этом работа консервативных сил при изменении конфигурации будет равна:
A12конс = WП (1) - WП (2) |
(4.10) |
где Wп(1), Wп(2) – значения потенциальной энергии системы в этих конфигурациях.
Некую конфигурацию можно принять за уровень с нулевой потенциальной энергией Wп=0, тогда Wп(1) будет равна работе консервативных сил по переводу системы из конфигурации (1) в конфигурацию (0).
Рассмотрим частный случай – изолированную систему из двух
взаимодействующих материальных точек, имеющих координаты r1 и r2 . Полная элементарная работа сил в системе равна:
dA = F12dr1 + F21dr
Согласно |
третьему |
закону |
F12 = −F21 , |
следовательно:
dA = F21(dr2 − dr1 ) = F21d(r2 − r1 ) = F21dr12
Здесь r12 = r2 − r1 - радиус-вектор точки 2 относительно точки 1, рис 4.5. Итак, работа и, следовательно, потенциальная
энергия изолированной системы из 2-х материальных точек зависит только от расстояния между ними.
4.5Примеры
4.5.1Потенциальная энергия в однородном поле тяжести
При перемещении точки с высоты Н на нулевой уровень Н=0 сила тяжести совершает работу A=mgH
WП=mgH+C (4.11)
где С-постоянная
4.5.2. Потенциальная энергия растянутой (или сжатой) пружины
Пусть х - отклонение груза от положения равновесия. Сила упругости пружины: F=-kx.
При возврате пружины в исходное состояние сила упругости совершает работу:
18
A = ∫0 δA = −k∫0 xdx = 1kx2
2
x x
Т.о. потенциальная энергия пружины: |
W |
= |
kx2 |
(4.12) |
|
||||
|
П |
2 |
|
|
|
|
|
||
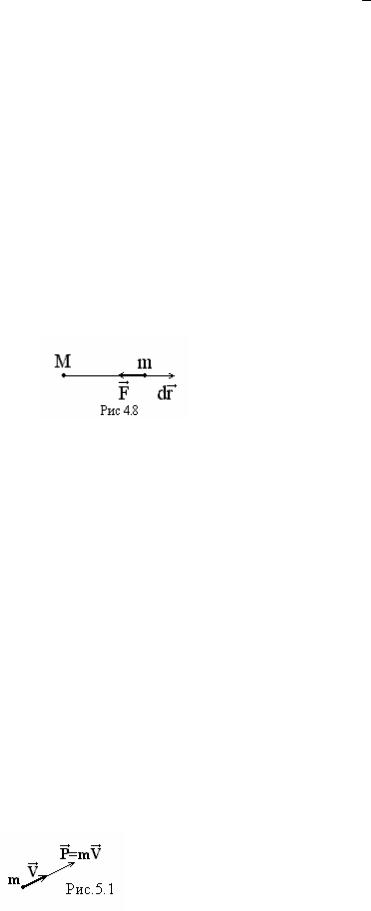
4.5.3 Потенциальная энергия гравитационного притяжения двух материальных точек массой M и m.
Точку М считаем неподвижной. Принимая Wп при бесконечном удалении точек равной нулю, получим, что потенциальная энергия в некоторой точке r равна работе сил гравитации по перемещению массы m из данной точки r в бесконечность
|
|
∞ |
|
∞ |
|
Mm |
|
Mm |
|
Mm |
W |
= A(r → ∞) = |
∫ |
(Fdr) = |
∫ |
− G |
R2 |
dr = G |
∞ |
− G |
r |
|
|
|
|
|
||||||
П |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
Т.о. потенциальная энергия гравитационного поля, созданного двумя материальными точками, имеет вид:
W = −G |
Mm |
(4.13) |
|
П |
r |
|
Лекция 5. Законы сохранения
В механике существуют 3 закона сохранения.
1.Закон сохранения импульса. Оказывается, что этот закон обусловлен однородностью пространства, т.е. эквивалентностью всех уравнений при параллельном переносе замкнутой системы как целого.
2.Закон сохранения энергии обусловлен однородностью времени, т.е. эквивалентностью всех уравнений при сдвиге всех процессов на одинаковый временной интервал.
3.Закон сохранения момента импульса обусловлен изотропностью пространства, т.е. эквивалентностью всех уравнений при повороте механической системы на любой угол.
Есть и другие законы сохранения (заряда, четности и т.д.), но в механике эти законы мы рассматривать не будем.
5.1 Закон изменения импульса и закон сохранения импульса
Импульсом материальной точки называется
величина: P = m V. (Эту величину раньше называли
“количеством движения”) Вектор P направлен туда же, куда и вектор скорости V, но его длина в m раз длиннее.
19
Замкнутая система материальных точек – это совокупность материальных точек, на которую не действуют внешние, по отношению к системе, тела.
Закон сохранения импульса: Импульс замкнутой системы материальных точек сохраняется (т.е. во все моменты времени одинаков).
|
|
|
|
Рсист |
= ∑mi Vi |
= const |
(5.1) |
i
Это фундаментальный закон природы, который не требует доказательств. Но его можно вывести: для классической механики на основе 2-го и 3-го законов Ньютона.
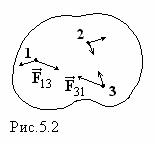
Вывод закона изменения импульса для системы материальных точек: Пусть система состоит из N материальных точек,
рис. 5.2.
Найдём |
|
|
|
производную |
d Pсист |
|||||
|
|
|
dt |
|||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
d |
|
P |
N |
N |
|
|
|||
d Pсист |
= |
|
∑ i |
= ∑ |
d Pi |
= ∑Fi |
||||
|
|
|
|
|||||||
dt |
|
dt |
|
i=1 |
|
dt |
i=1 |
|
|
|
(Здесь мы использовали то, что производная от суммы равна сумме производных.)
|
|
Результирующую силу Fi , действующую на i-ю точку, можно представить в |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
виде |
суммы |
внешних |
и внутренних |
сил: |
F |
= F |
внеш + Fвнут |
, |
где |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Fi |
внут = ∑Fijвнут |
Тогда: |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
i≠ j |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
N |
|
|
N |
|
|
N |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|||||||||
|
|
|
|
∑ |
|
|
∑ |
|
|
∑ |
|
|
|
|
|
||
|
|
|
d Pсист |
|
= |
|
(F внеш + Fвнут ) = |
|
Fвнеш + |
|
F внут = Fвнеш |
|
(5.2) |
||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
i |
i |
|
i |
|
|
i |
|
рез |
|
|
|
|
|
|
|
|
i=1 |
|
|
i=1 |
|
|
i=1 |
|
|
|
|
|
Внутренние силы во второй сумме уравнения (5.2) попарно уничтожаются за счёт 3-го закона Ньютона (см. рис. 5.2.): ∑∑Fijвнут = 0.
И мы получаем закон изменения импульса для системы материальных точек:
|
|
|
|
d Pсист |
|
|
|
|
|
|
|
|
= Fвнеш |
|
(5.3) |
||
|
|
|
|
|
|
|||
|
|
|
|
dt |
|
рез |
|
|
|
|
|
|
|
|
|
|
|
это закон справедлив всегда для произвольной системы материальных точек. |
||||||||
|
Для |
замкнутой системы |
внешние силы равны нулю |
Fвнеш |
= 0 , т.е. |
|||
|
|
|
|
|
|
|
рез |
|
|
d Pсист |
= 0, следовательно |
|
P |
|
= const |
|
(5.1) |
|
|
|
|
|
||||
|
dt |
|
|
сист |
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. мы вывели закон сохранения импульса.
20
Из (5.3) видно, что импульс системы сохраняется не только, когда нет внешних сил, т.е. для замкнутой системы, но и в случае Fрезвнеш = 0, когда система незамкнута, но результирующий вектор внешних сил равен нулю.
5.2. Центр масс и закон его движения
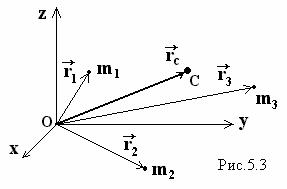
Центром масс системы из n материальных точек называют точку С
с координатой: |
|
|
r |
|
|
|
r |
|
|
|
r |
|
|
|
|
|
||||
|
|
m |
+ m |
2 |
+ ... + m |
n |
n |
|
|
|
|
|||||||||
r |
= |
|
1 1 |
|
|
|
|
2 |
|
|
n |
= |
1 |
∑ |
m |
|
r |
(5.4) |
||
|
|
|
+ m |
|
+ ... + m |
|
|
|
|
i |
||||||||||
C |
|
|
m |
|
|
|
|
|
|
m |
|
i |
|
|||||||
|
|
|
1 |
2 |
n |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
||||
где mi - масса |
i-той материальной точки; |
ri - |
|
радиус-вектор |
i-той |
|||||||||||||||
материальной точки; |
m = ∑mi |
|
- суммарная |
|
|
|
|
|
||||||||||||
масса системы.
Воднородном поле сил тяжести центр масс совпадает с центром тяжести.
Вцентре масс может не оказаться никакой массы; это точка пространства.
Найдём скорость центра масс:
|
d r |
|
1 n |
|
r ) |
|
1 n |
|
d r |
|
1 n |
1 n |
|
||||||
|
d(m |
|
|
|
P |
||||||||||||||
VC = |
c |
= |
|
∑i=1 |
i |
i |
= |
|
∑i=1 |
mi |
i |
= |
|
∑i=1 |
mi Vi = |
|
∑i=1 |
Pi = |
сист |
dt |
m |
dt |
|
m |
dt |
m |
m |
m |
|||||||||||
n
Величина ∑Pi = Pсист является импульсом системы материальных точек.
i=1 |
|
|
Итак, мы получили |
Pсист = m VC |
(5.5) |
Подставляя (5.5) в (5.3) получим уравнение движения центра масс: |
|
|
d(mV ) |
|
|
C |
= Fвнеш |
(5.6) |
|
||
dt |
рез |
|
|
|
Итак, центр масс движется так, как двигалась бы материальная точка, масса которой равна массе всей системы, помещённая в центр масс и движущейся под действием силы, равной результирующему вектору внешних сил.
В замкнутой системе Fiвнеш = 0, Fрезвнеш = ∑Fiвнеш = 0, следовательно
m VC = const , и мы получаем: |
|
|
VC = const |
(для замкнутой системы) |
(5.7) |
Итак, центр масс замкнутой системы движется прямолинейно и равномерно, либо покоится.
Система отсчёта, начало которой совпадает с центом масс, называется
системой центра масс.
21
Лекция 6 . Кинетическая энергия. Закон сохранения энергии 6.1. Кинетическая энергия
Пусть на материальную точку массой m действуют силы, результирующая которых F. Элементарная работа этих сил δA = (F dr). Учитывая, что
|
d V |
|
|
|
|
|
|
|
|
|
|
||
F = m |
, а dr |
|
|
d V |
|
|
|
|
|
= m(V d V). |
|||
|
|
|
|
|
|
||||||||
|
= V dt , получим: δA = (F dr)= m |
|
Vdt |
||||||||||
|
dt |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
Покажем, что скалярное произведение (V d V) равно d |
|
|
|
|
. Для этого |
||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|||
найдём приращение для обеих частей очевидного равенства (V V)= V2 . |
|||||||||||||
|
|
|
|
|
|
|
V |
2 |
|
|
|
|
|
(d V V) + (V d V) = d(V2 ) ,откуда следует (V d V) = d( |
|
|
). |
|
|
||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
||
С учётом последнего замечания элементарная работа принимает вид:
|
|
|
2 |
|
||
δA = (F d r)= d |
m V |
|
|
(6.1) |
||
|
|
|||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
Интегрируя работу вдоль траектории частицы от точки 1 до точки 2, получим:
A12 = r∫2 (F
r1
r
dr)= ∫2
r1
m V2 |
|
|
mV2 |
|
d |
|
|
= |
2 |
|
|
|||
|
|
|
2 |
|
2 |
|
|
||
− |
mV2 |
|
|
1 |
(6.2) |
||
2 |
|||
|
|
Величина W |
|
= |
m V 2 |
называется кинетической энергией материальной |
|||
K |
|
||||||
|
2 |
|
|
|
|
||
|
|
|
|
|
|
||
точки. |
|
|
|
|
|
|
|
Итак, работа результирующей всех сил (или работа всех сил), действующих |
|||||||
на материальную точку, тратится на приращение её кинетической энергии. |
|
||||||
|
|
|
|
Aвсехсил = W |
− W |
(6.3) |
|
|
|
|
|
12 |
K2 |
K1 |
|
В случае системы материальных точек уравнение (6.3) нужно написать для каждой материальной точки и затем сложить. В результате получим теорему об изменении кинетической энергии системы материальных точек.
|
(1) |
(1) |
(1) |
A12 |
= WK2 |
− WK1 |
|
A(2) = W(2) − W(2) |
|||
+ |
12 |
K2 |
K1 |
|
|||
A(n) = W(n) − W(n) |
|||
|
12 |
K2 |
K1 |
|
|
|
|
|
|
|
A12всехсил = WK2 − WK1 |
|
|
(6.4) |
|
|
|
|
Здесь Aвсехсил |
– работа всех сил, действующих на материальные точки |
12 |
|
системы (внешние, внутренние, консервативные и неконсервативные, т.е. все виды сил).
WK1 и WK2 – кинетическая энергия всех точек системы в состоянии 1 и 2 соответственно.
22