

Лекции по физике
.pdfИтак, доказана Теорема об изменении кинетической энергии системы:
Изменение кинетической энергии системы материальных точек равно работе всех сил, действующих на точки системы.
Aвсехсил = W |
− W |
(6.4) |
|
12 |
K2 |
K1 |
|
Примечание: Следует отметить, что работу внутренних сил системы также следует учитывать, т.к. они изменяют кинетическую энергию системы.
6.2. Закон изменения и закон сохранения полной механической энергии
Рассмотрим систему из n материальных точек, на которые действуют и консервативные и неконсервативные силы. Согласно (6.4) работа всех сил
A12всехсил затрачивается на приращение кинетической энергии системы. Разобьём
эту работу на работу консервативных сил А12конс и работу неконсервативных сил
А12неконс.
|
|
А12конс + А12неконс = WK2 – WK1 |
||||||
Но, в соответствии с (4.10), А |
конс |
= W |
– W |
|
- работа |
|||
|
|
|
|
12 |
П1 |
П2 |
|
|
консервативных сил равна убыли потенциальной энергии.Отсюда: |
||||||||
(W |
K2 |
+ W |
) – (W |
+ W |
)= А |
неконс |
||
|
П2 |
|
К1 |
П1 |
|
12 |
|
|
Сумму кинетической и потенциальной энергии системы называют полной |
||||||||
механической энергией системы и обозначают Е: |
|
|
||||||
|
|
Е = WK + WП |
|
|
(6.5) |
|||
Итак, мы получили закон изменения полной механической энергии:
Приращение полной механической энергии системы материальных точек равно работе неконсервативных сил, действующих на точки системы:
Е – Е = А |
неконс |
(6.6) |
|
2 |
1 |
12 |
|
Если неконсервативных сил нет, то механическая энергия системы остаётся постоянной, и мы получаем закон сохранения полной механической энергии:
В консервативных системах полная механическая энергия системы сохраняется.
Е ≡ WК + WП =const |
(6.7) |
6.3 Упругое и неупругое столкновения
Абсолютно неупругий удар – это удар, при котором после столкновения тела “слипаются” и далее движутся вместе.
При этом часть кинетической энергии переходит в тепло, поэтому полная механическая энергия при неупругом ударе не сохраняется. С другой стороны, выполняется закон сохранения
импульса: Pсистдоудара = Pсистпослеудара .
23
Для двух тел получим: |
|
|
|
|
|
|
|
|
|
|
|||
m V + m |
2 |
V = (m |
+ m |
)V' |
, где V и V скорости тел до удара, а V' |
- |
|||||||
1 |
1 |
2 |
1 |
2 |
|
|
1 |
|
2 |
|
|
|
|
скорость слипшихся тел после удара. Из этого уравнения легко получить V' . |
|
||||||||||||
|
|
|
|
V' |
= (m V + m V )/(m + m |
) |
(6.8) |
|
|||||
|
|
|
|
|
1 |
1 |
2 |
2 |
1 |
2 |
|
|
|
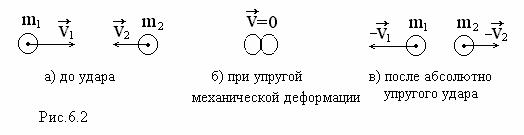
Отметим, что если два тела сталкиваются неупруго, то в системе центра масс они двигаются вдоль одной прямой навстречу друг другу, а после удара – покоятся, рис. 6.1.
Абсолютно упругим называют удар, при котором потери механической энергии нет. (Выполняются закон сохранения энергии и закон сохранения импульса).
Следует отметить, что в природе ничего “абсолютного” не бывает, но некоторые удары с высокой точностью можно считать абсолютно упругими.
Рассмотрим абсолютно упругий удар в системе центра масс. Напомним, что
в ней VC = 0.
При механической деформации шары аналогичны сжатым пружинам, которые затем выпрямляются. После удара (в системе центра масс) шары как бы поменяют знак своей скорости.
Для произвольных начальных |
скоростей V1 и |
V2 скорости тел после |
||||||||
|
|
|
′ |
|
|
′ |
описываются формулами: |
|||
абсолютно упругого удара V |
|
и V |
||||||||
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
2m2 |
V2 + |
(m1 − m2 )V1 |
|
|
||||
V1′ = |
|
|
||||||||
|
|
|
m1 + m2 |
|
|
|||||
|
|
|
|
|
|
|
(6.9) |
|||
|
|
|
|
|
|
|
|
|
|
|
′ |
= |
2m1 V1 |
+ |
(m2 − m1 )V2 |
|
|||||
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 + m2 |
|
|
|||||
|
|
|
|
|
|
|
|
|||
где m1 и m2 – массы соответствующих тел.
6.4. Общефизический закон сохранения энергии
Классическая механика учитывает лишь кинетическую энергию макроскопического движения тел и их потенциальную энергию, отвлекаясь от атомистического строения вещества.
На самом деле при трении, неупругом ударе и т.д. энергия не пропадает, а переходит в кинетическую и потенциальную энергию теплового движения атомов и молекул, (во внутреннюю энергию). Поэтому полное, с учётом энергии атомов, количество энергии в изолированной системе тел всегда остаётся постоянным.
24

Это общефизический закон сохранения энергии. Его нельзя вывести из уравнений механики, т.к. он имеет общую универсальность.
В основе закона сохранения энергии лежит однородность времени, т.е. тот факт, что замена момента времени t1 моментом времени t2 при сохранении координат и скорости тел не изменяет законов движения системы.
Лекция 7 Закон сохранения момента импульса
Ликбез. Напомним свойства векторного произведения.
Вектор c = a× b называют векторным произведением векторов a и b, если он обладает следующими 3-мя свойствами:
1) Модуль вектора c вычисляется по формуле:
|
|
= |
|
|
|
× |
|
|
|
sinα , где α - угол между векторами |
|
|
|
|
|
||||||
|
|
|
||||||||
c |
|
|
a |
|
|
b |
|
|||
|
|
|
|
|
|
|
|
|
|
|
a и b. Направление вектора c определяется правилами 2 и 3.
2) Вектор c перпендикулярен и к первому вектору (a) и ко второму (b): c a ; c b следовательно, вектор c перпендикулярен плоскости, в которой лежат вектора a
и b. Но перпендикулярно плоскости будут два направления: и вверх, и вниз. Выбрать верное позволяет правило «буравчика»:
3) Ручку буравчика нужно поворачивать по кратчайшему пути от первого
вектора (a) ко второму (b), тогда перемещение самого буравчика укажет направление вектора c .
|
|
|
|
|
|
= |
|
|
|
× |
|
|
|
|
sin0o = 0. |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
Пример 1. Если вектор a |
|
b , то |
c |
|
|
a |
|
|
b |
|
|||||||||||||
|
||||||||||||||||||||||||
|
|
|
|
|
|
= |
|
|
|
× |
|
|
|
|
sin90o = a b. |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Пример 2. Если вектор a b, то |
|
|
c |
|
|
a |
|
|
b |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае модуль вектора c принимает максимально возможное значение.
Пример 3. Если векторы a и b поменять местами см. рис. 7.1., то
изменяется знак векторного произведения: b× a = −a× b.
Примечание. Иногда векторное произведение обозначают квадратными
скобками.
a×b ≡ [a×b]
Конец ликбеза.
7.1 Момент силы и момент импульса относительно неподвижной точки
Введём следующее определение:
Моментом силы относительно неподвижной точки О называют векторное произведение радиуc-вектора r , идущего от точки О к точке приложения силы, на силу F .
25
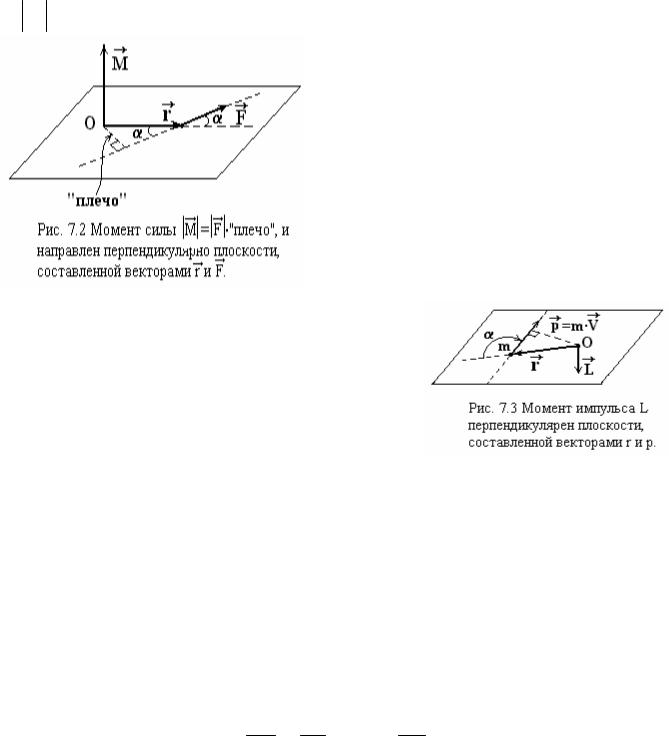
M = r× F |
(7.1) |
Момент силы M это такая физическая величина, которая приводит к угловому ускорению вращающихся тел. Модулю момента силы можно дать
наглядное толкование:
M = F r sinα = F"плечо", где введено понятие «плечо».
По определению «плечо» = r sinα, соответствует кратчайшему расстоянию от точки О до линии, вдоль
которой действует силаF .(см. рис. 7.2). Если на материальную точку действуют N различных сил, то результирующий момент сил определяется как векторная сумма
моментов всех сил.
|
N |
|
N |
|
Mрез |
= ∑Mi |
= ∑ri |
× Fi (7.2) |
|
|
i=1 |
|
i=1 |
|
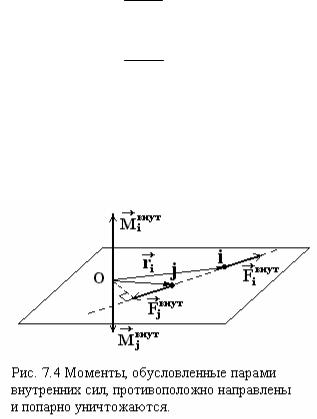
L материальной точки массой m относительно неподвижной
точки |
О |
называется векторное произведение |
|||
радиус-вектора r |
на |
импульс материальной |
|||
точки |
p = m V . |
|
|
|
|
|
|
L = r× p = r× m V |
(7.3) |
||
Для |
системы |
из |
N материальных |
точек |
|
суммарный момент импульса L равен векторной сумме моментов импульса всех точек.
N |
|
N |
|
L = ∑Li |
= ∑ri×pi |
(7.4) |
|
i=1 |
|
i=1 |
|
7.2 Закон изменения момента импульса. (Уравнение моментов)
Пусть материальная точка массой m движется относительно неподвижной точки О со скоростью V . Продифференцируем её момент импульса
по времени:
Но dr dt = V ,
dt = V ,
параллельные векторы мы получаем:
dL = dr × p+ r× dp dt dt dt
поэтому в первом произведении векторно умножаются
V и mV , что даёт ноль. В свою очередь dp dt = F, и
dt = F, и
26
dL |
|
|
|
dL |
|
|
|
|
= r |
× F |
или |
|
= M |
(7.5) |
|
dt |
dt |
||||||
|
|
|
|
|
Это закон изменения момента импульса (уравнение моментов) для одной материальной точки.
Для системы из N материальных точек уравнение (7.5) можно написать для каждой точки системы, а затем сложить: (при этом результирующие силы Fi представим в виде суммы внешних и внутренних сил: Fi = Fiвнут + Fiвнеш ).
dL1 = r1 (F1внут + F1внеш ) = r1 F1внут + r1 F1внеш
dt
dL2 = r2 (F2внут + F2внеш ) = r2 F2внут + r2 F2внеш
dt
dL |
N |
|
|
|
|
|
|
|
|
|
|
|
= r |
(Fвнут + Fвнеш ) = r |
Fвнут |
+ r |
|
Fвнеш |
|
||||
|
|
|
|
||||||||
dt |
|
N |
N |
N |
N |
N |
N |
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
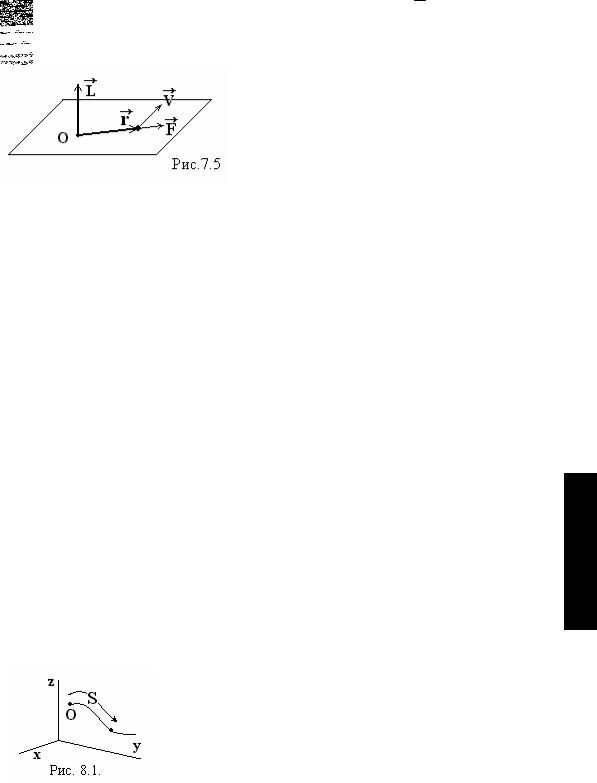
Моменты |
сил, |
обусловленные |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
внутренними силами Fiвнут , попарно |
||||||
|
|
|
|
|
уничтожатся. |
|
Действительно, |
по |
|||
|
|
|
|
|
третьему закону |
Ньютона |
при |
||||
|
|
|
|
|
взаимодействии точек системы между |
||||||
|
|
|
|
|
собой , например, точки i и j на |
||||||
|
|
|
|
|
рисунке 7.4, возникающие внутренние |
||||||
|
|
|
|
|
силы |
равны |
по |
величине, действуют |
|||
вдоль одной прямой, следовательно, имеют одинаковое “плечо” и одинаковые по
модулю моменты сил. Но эти моменты и будут противоположно
|
|
|
|
|
направлены (рис. 7.4), т.к. Fiвнут и |
Fjвнут имеют противоположные направления. |
|||
В результате для системы материальных точек получаем закон изменения |
||||
момента импульса: |
|
|
||
|
|
dLсист |
|
|
|
|
= Mвнеш |
(7.7) |
|
|
|
|
||
|
|
dt |
рез |
|
|
|
|
|
|
|
N |
|
|
|
где Lсист |
= ∑Li - момент импульса системы материальных точек, |
|
||
i=1
27

|
N |
|
|
|
Mрезвнеш = ∑ri ×Fiвнеш |
- результирующий момент |
внешних сил, |
||
|
i=1 |
|
|
|
действующих на точки системы. |
|
|||
Полученное |
уравнение |
справедливо и для моментов, |
вычисляемых не |
|
относительно точки О, а относительно некоторой оси ОО’. При этом “плечо” силы или импульса – это расстояние от линии действия F или P до оси ОО’. Моменты Mz или Lz относительно оси равны проекции на эту ось моментов
M или L, рассчитанных относительно любой точки этой оси.
Если точка О, относительно которой производится расчет моментов, находится в начале координат x,y,z, то справедливы уравнения:
dL |
x |
= M |
|
; |
dLy |
= M |
|
; |
dL |
z |
= M |
|
(7.8) |
|
x |
|
y |
|
z |
||||||||
dt |
|
dt |
dt |
|
|||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
где Lx ,Ly ,Lz ,Mx ,My ,Mz рассчитываются относительно соответствующих
осей, или рассчитываются относительно точки О, а затем проектируются на оси x,y,z.
7.3 Закон сохранения момента импульса
Из закона изменения момента импульса для системы материальных точек:
dLсист = Mвнешрез
dt
следует, что в замкнутых системах, где внешних сил нет и Mвнешрез = 0, суммарный момент импульса Lрез = const , т.е. сохраняется, и мы получаем:
Закон сохранения момента импульса: В замкнутой системе материальных точек момент импульса сохраняется.
|
N |
|
|
= ∑ri ×pi |
= const |
|
|
Lсист |
(7.9) |
||
|
i=1 |
|
|
Примечание: Момент импульса сохраняется и |
в незамкнутой системе |
||
материальных точек, если результирующий момент внешних сил Mвнешрез равен
нулю.
Закон сохранения момента импульса справедлив не только в механике, но и во всём материальном мире. В основе закона сохранения момента импульса лежит изотропность пространства, т.е. неизменность законов движения при повороте системы в пространстве на любой угол.
7.4 Движение в поле центральных сил
Силы, действующие на материальную точку, называются центральными, если они определяются только расстоянием от материальной точки до некоторой неподвижной точки, называемой центром сил, и направлены всюду либо от центра сил либо к центру сил.
28
Если центр сил принять за начало координат О, то центральные силы можно описать зависимостью:
|
|
|
|
|
|
F = f(r) r |
(7.10) |
|
r
Пример: движение спутников в поле тяжести Земли.
В поле центральных сил вектор силы F направлен вдоль или навстречу радиус-вектору r .
Очевидно, что моменты сил, создаваемые центральными силами, равны нулю. Поэтому
момент импульса L в поле центральных сил сохраняется:
L = const |
(7.11) |
Постоянство момента импульса означает, что движение происходит в одной плоскости.
Можно показать, что поле центральных сил консервативно. Поэтому полная механическая энергия материальной точки в этом поле сохраняется.
E=Wк+Wп=const. |
(в поле центральных сил) |
(7.12) |
Лекция 8 Твёрдое тело в механике 8.1. Степени свободы. Обобщённые координаты
Числом степеней свободы называется минимальное количество независимых переменных, которые полностью задают положение всех точек системы в пространстве.
Примеры: |
1 точка – 3 степени свободы (x,y,z) или (r,ϕ,ψ), |
2точки – 6 степеней свободы (x1,y1,z1, x2,y2,z2),
2связанные точки – 5 степеней свободы
(каждая связь уменьшает число степеней свободы на 1), 3 точки – 9 степеней свободы, 3 связанные точки – 6 степеней свободы (9-3связи=6)
движение точки вдоль кривой – 1 степень свободы (S – расстояние от начала О) (Рис.8.1).
Твёрдое тело имеет 6 степеней свободы т.к. в качестве независимых параметров можно взять координаты 3-х любых точек тела, не лежащих на одной прямой.
Обобщёнными координатами называются любые переменные q1,q2…qn, число которых n равно числу степеней свободы системы и которые полностью задают положение всех точек системы.
Примеры: Для одной точки декартовы координаты x,y,z являются обобщёнными. Другой вариант – координаты точки в сферических координатах r,ϕ,ψ. Твёрдое тело, одна из точек которого закреплена, имеет 3 степени свободы (6-3=3). Твёрдое тело, у которого ось вращения фиксирована, имеет 1
29
степень свободы (3-2=1). При этом обобщённой координатой может служить угол поворота тела вокруг оси.
8.2 Уравнение движения и равновесия твёрдого тела
Т.к. твёрдое тело можно представить как систему материальных точек, то для него справедливо уравнение движения:
|
|
|
|
||||
|
|
|
dP |
= F |
внеш |
(8.1) |
|
|
|
|
|
|
|
||
|
|
|
dt |
|
|
||
и закон изменения момента импульса: |
|
|
|||||
|
|
|
|
||||
|
|
dL |
= Mвнеш |
(8.2) |
|||
|
|
|
|||||
Здесь: P = ∑Pi |
|
|
dt |
|
|
||
- суммарный импульс системы материальных точек, |
|
||||||
Fвнеш = ∑Fвнеш |
- результирующая внешних сил, действующих на систему, |
||||||
i |
|
|
|
|
|
|
|
L = ∑Li - суммарный момент импульса системы,
Mвнеш = ∑Miвнеш - результирующий момент внешних сил, действующих на систему.
Итак, для описания движения твёрдого тела, которое имеет 6 степеней свободы, т.е. 6 обобщённых координат, есть 2 векторных уравнения (или 6 скалярных). Эти 6 уравнений полностью определяют движение тела в пространстве, т.е. изменение 6-ти переменных (обобщённых координат).
Если твёрдое тело покоится, то получаем условия равновесия твёрдого тела:
Fвнеш = 0, |
Mвнеш = 0 |
(8.3) |
Это необходимые условия равновесия твёрдого тела. Но эти условия не являются достаточными, т.к. при их выполнении центр масс может двигаться
равномерно и прямолинейно, P = const , а само тело может дополнительно равномерно вращаться, имея L = const .
8.3 Вращение твёрдого тела
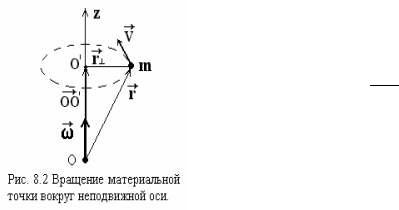
Пусть материальная точка массой m вращается вокруг неподвижной оси ОО´, вдоль которой направлена ось z, рис.8.2. Для нее справедливо уравнение вращательного движения:
dL = Mвнеш
dt
При этом L и Mвнеш рассчитаны относительно произвольной точки О, лежащей на оси. Проекции L и Mвнеш на ось z называют моментом импульса Lz относительно оси z и моментом силы Mz
относительно оси z.
30
Найдём, чему равно Lz для произвольной материальной точки массой m.
Сначала найдём L относительно точки О, рис. 8.2.
L = r× mV = (00′ + r )× mV = 00′ × mV+ r × mV
Здесь мы учли, что r = 00′ + r . Чтобы получить Lz, необходимо спроектировать L на ось z. Проекция вектора [00′ × mV] на ось z равна нулю, т.к. это векторное произведение перпендикулярно 00′. Второе векторное
произведение |
r |
× mV параллельно оси z, т.к. перпендикулярно плоскости, в |
||||||
|
|
|
|
|
|
|
|
|
которой лежат вектора r |
|
и V . Следовательно, с учётом того, что V = r ω, |
||||||
|
|
|
|
|
|
|
|
|
получаем: |
|
|
|
= r mV = r m(r ω) = mr2 |
|
|||
|
|
L |
z |
ω |
||||
|
|
|
|
|
|
|
|
|
По определению, величина |
J = m r2 |
называется |
моментом инерции |
|||||
|
|
|
|
|
|
|
|
|
материальной точки относительно оси.
Здесь r - расстояние от точечной массы m до оси.
Итак, момент импульса Lz материальной точки относительно оси вращения Z равен:
Lz = Jz ω |
(8.4) |
где Jz – момент инерции относительно оси z, ω – угловая скорость.
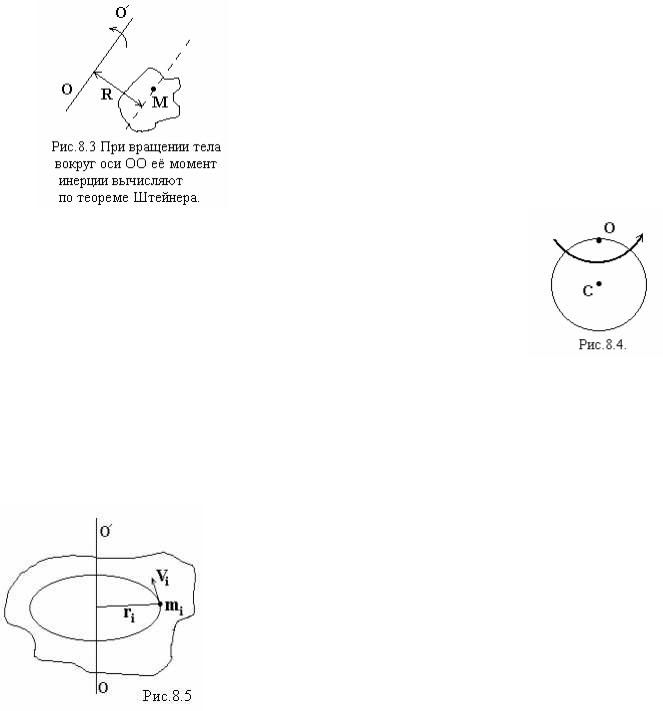
Если у нас вращается не одна материальная точка, а твёрдое тело, то для него момент импульса относительно оси складывается из моментов импульса каждой точки тела:
Lz = ∑mi r2i ω = ω∑mi r2i = Jz ω |
(8.4) |
где Jz = ∑mi r2i - является моментом инерции всего тела относительно
оси z. Строго говоря, для сплошного твёрдого тела момент инерции является не суммой, а интегралом, но этот вопрос будет подробнее рассмотрен в следующем разделе.
Уравнение динамики тела, вращающегося относительно оси z, получается проектированием уравнения (8.2) на ось:
|
|
dLz |
= Mвнеш |
||
|
|
dt |
|
|
z |
|
|
|
|
|
|
|
или |
Jz |
dω |
= Mвнешz |
|
|
|
||||
|
|
|
dt |
||
Где Mвнеш |
- проекция на ось Z результирующего момента внешних сил. |
||||
z |
|
|
|
|
|
8.4 Момент инерции твёрдого тела. Теорема Штейнера
(8.5)
(8.6)
Для расчёта момента инерции твёрдого тела относительно оси, необходимо разбить тело на элементарные массы dm, для каждой рассчитать элементарный
31
момент инерции и проинтегрировать все элементарные моменты инерции по всему объёму тела V:
(8.7)
Но dm = ρdV, где ρ - плотность тела,Vа dV - элементарный объём. Поэтому (8.7) можно выразить по-другому:
2 |
(8.8) |
|
J = ∫r ρdV |
||
|
V
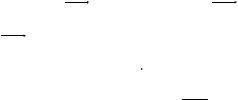
При расчётах момента инерции тел, очень полезна теорема Штейнера, которая имеет следующий вид:
JОО´=JC + mR2 |
(8.9) |
где JОО´ - момент инерции относительно оси ОО´; JC – момент инерции относительно оси параллельной ОО´ и проходящей через центр масс тела C; m – масса всего тела; R – расстояние между осями.
Пример: Рассчитаем момент инерции обруча, вращающегося на гвозде вокруг точки О. По теореме Штейнера, учитывая, что момент инерции обруча относительно центра масс С равен mR2, получим:
Jo=JC + mR2 = mR2 + mR2 = 2mR2
8.5 Кинетическая энергия при вращении тела вокруг оси
Полная кинетическая энергия любого тела складывается из кинетической энергии всех материальных точек тела:
|
|
∑ |
|
|
∑ |
2 |
|
∑ |
|
|
2 |
|
2 |
∑ |
|
2 |
|
||
W |
= |
|
W |
= |
|
miVi2 |
= |
|
mi |
ω2ri2 |
= ω2 |
|
m r2 |
= |
Jzω2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
K |
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
i i |
|
|
|
||
|
|
|
|
|
Итак, кинетическая энергия вращающегося тела |
||||||||||||||
|
|
|
|
равна: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W = |
J |
|
ω2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
z |
|
|
|
|
|
(8.10) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
K |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где J – момент инерции тела относительно оси вращения Z;
ω- угловая скорость вращения тела.
8.6Кинетическая энергия тела при плоском движении
Плоским называют движение, при котором все материальные точки движутся, оставаясь в параллельных плоскостях.
Пример: Колесо при движении велосипеда.
32