

5.4. Содержание отчета
Преимущества и недостатки плавного регулирования на ЭПС постоянного тока. Описание особенностей частотно- и широтно-импульсного регулирования постоянного напряжения.
Исследуемая электрическая схема силовых цепей электровоза постоянного тока.
Результаты исследования процессов при плавном регулировании напряжения ТЭД электровоза (см. табл. 5.1).
Вывод о перспективах применения плавного регулирования ТЭД на ЭПС постоянного тока.
5.5. Контрольные вопросы
Какие преимущества имеют системы плавного регулирования напряжения ТЭД по сравнению с системами ступенчатого регулирования?
Чем различаются между собой широтно- и частотно-импульсное регулирование выпрямленного напряжения?
Каким образом формируется выходное напряжение в импульсном преобразователе (см. рис. 5.1)?
Для чего предназначен обратный диод в схеме импульсного преобразователя (см. рис. 5.1)?
Что характеризует коэффициент заполнения импульсов λ и от чего он зависит?
В чем заключаются сложности использования систем плавного регулирования напряжения ТЭД на ЭПС постоянного тока?
Лабораторная работа 6
СИСТЕМЫ РЕОСТАТНОГО ТОРМОЖЕНИЯ
ЭЛЕКТРОПОДВИЖНОГО СОСТАВА
Цель работы: изучить схемы и принцип работы систем реостатного торможения ЭПС постоянного и переменного тока.
6.1. Общие сведения
Системы электрического торможения – реостатного и рекуперативного – нашли широкое применение на ЭПС вследствие некоторых преимуществ по сравнению с системами механического торможения, а именно: наличие наряду с механическими тормозами дополнительного электрического тормоза значительно улучшает условия безопасной эксплуатации ЭПС и способствует повышению технических скоростей движения поездов; возможность экономить не только электрическую энергию (при рекуперативном торможении), но и материал тормозных колодок, которые в процессе механического торможения изнашиваются, а пыль от них загрязняет оборудование подвижного состава и устройства пути; при электрическом торможении меньше вероятность возникновения юза, который, даже возникнув, как правило, не сопровождается полным заклиниванием колес.
Вместе с тем к системам электрического торможения предъявляются особые требования, касающиеся обеспечения высокой надежности электрического тормоза в эксплуатации, выполнения условий механической и электрической устойчивости процесса торможения, высоких энергетических показателей, удобства управления и возможности его автоматизации. В настоящее время большинство эксплуатируемого и весь создаваемый электроподвижной состав оснащаются электрическими тормозами, соответствующими перечисленным требованиям.
Основу систем электрического торможения в целом и реостатного торможения в частности составляет работа ТЭД в генераторном режиме. Вырабатываемая при этом электрическая энергия преобразуется в тепловую и рассеивается в окружающую среду. Для этого подвижная единица оснащается специальным тормозным реостатом, мощность которого должна обеспечивать необходимые тормозные усилия.
Возникающая в ТЭД тормозная сила пропорциональна току обмотки якоря и определяется по формуле:
![]() , (6.1)
, (6.1)
где сВ– конструктивная постоянная;
Iя– ток обмотки якоря;
Ф – магнитный поток возбуждения тягового двигателя.
На ЭПС используются две разновидности реостатного тормоза – с последовательным и независимым возбуждением.
Реостатный тормоз с последовательным возбуждением(самовозбуждением) применяется преимущественно на электропоездах в качестве одной из систем торможения, изначально он использовался и на некоторых сериях электровозов – ВЛ19, первые номера ЧС2Т.
Для перевода ТЭД в режим торможения
(рис. 6.1, а) необходимо реверсировать
обмотку возбуждения, чтобы сохранить
в ней такое же направление тока и,
следовательно, магнитного потока, как
и в тяговом режиме. При этом
направление тока в цепи якоря изменится.
В цепь ТЭД вводится тормозной реостат
Rт.
Обязательным условием возникновения
генераторного тока является наличие
остаточного магнитного потока обмотки
возбуждения ТЭД, наводящего в обмотке
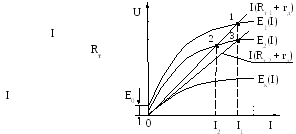
якоря ЭДС Е0(рис. 6.1, б). В процессе самовозбуждения
ток якоря будет увеличиваться до тех
пор, пока ЭДС двигателя![]() не сравняется с падением напряжения на
нагрузке
не сравняется с падением напряжения на
нагрузке![]() ,
т. е. на тормозном реостате. Уравнивание
ЕдиUнпроисходит в точке 1, т. е. в этой точке
выполняется условие электрической
устойчивости, которое применительно к
генераторному режиму работы ТЭД можно
выразить неравенством [2]:
,
т. е. на тормозном реостате. Уравнивание
ЕдиUнпроисходит в точке 1, т. е. в этой точке
выполняется условие электрической
устойчивости, которое применительно к
генераторному режиму работы ТЭД можно
выразить неравенством [2]:
![]() . (6.2)
. (6.2)
В установившемся режиме ток двигателя
![]() . (6.3)
. (6.3)
По мере снижения скорости движения ЭДС уменьшается, что приводит к снижению тока двигателя и тормозной силы (точка 2 на рис. 6.1, б). Поддержать тормозную силу на заданном уровне можно уменьшением сопротивления тормозного реостата (прямая I(Rт 2+rд)). При этом ток восстанавливается до значенияI1(точка 3). Таким образом, изменяя сопротивление тормозного резистора, можно регулировать процесс торможения.

а б
Рис. 6.1. Схема реостатного тормоза с последовательным возбуждением (а) и
диаграммы ЭДС и напряжения (б)
Область действия реостатного тормоза ограничена минимальной так называемой критической скоростью Vк, которой на рис. 6.1, б соответствует криваяEк(I). При скоростиV<VккриваяE(I) не пересекает прямую нагрузки, вследствие чего нельзя осуществить реостатное торможение. Ограничение эффективности, а также необходимость большого числа ступеней тормозного реостата и сложность контроля процесса самовозбуждения ТЭД являются существенными недостатками реостатного тормоза с последовательным возбуж-дением.
У
Рассмотрим схему реостатного торможения
с независимым возбуждением (рис. 6.2). В
процессе перехода из режима тяги в
режим реостатного торможения обмотка
возбуждения отключается от обмотки
якоря и подключается к независимому
источнику, в качестве которого может
быть использован электромашинный
(возбудитель) или статический
преобразователь.

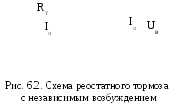
Подключение обмотки возбуждения производится таким образом, чтобы ток Iв, протекающий по обмотке возбуждения, поменял свое направление. Обмотка якоря замыкается на тормозной реостат. При этом ток якоря
![]() , (6.4)
, (6.4)
где rа– сумма сопротивления обмоток якоря, добавочной и компенсационной обмоток ТЭД.
Из формулы (6.4) следует, что в схеме реостатного тормоза с независимым возбуждением существует два способа регулирования тока якоря Iя– изменением сопротивления тормозного реостатаRти магнитного потока возбуждения Ф. Характеристики, соответствующие этим способам регулирования, показаны на рис. 6.3.
При обоих способах регулирования тока якоря Iяусловие электрической устойчивости реостатного торможения (6.2) выполняется, что обеспечивается формой характеристики двигателя постоянного тока с независимым возбуждением.
I(Rт+rа)
U
0
I
I1
I2
E = сvФV
I3
I(Rт+rа)
Ф(Iв 1)
Ф(Iв 2)
Ф(Iв 3)












U
Rт 1
Rт 2
Rт 3


E = сvФV






Iв
= const
0
I
I1
I2
I3
а б
Рис. 6.3. Характеристики способов регулирования тока якоря в схеме
реостатного тормоза с независимым возбуждением:
а – при Iв=const; б – приRт=const
При первом способе регулирования тока якоря Iя(рис. 6.3, а) регулируют сопротивление тормозного реостатаRт, оставляя неизменным ток возбужденияIв. При этом получается конечное число позиций регулирования тока якоря, равное числу ступеней тормозного реостата, а минимальная скорость, при которой сохраняется эффективность тормоза, ограничивается его наименьшим сопротивлением.
При втором способе (рис. 6.3, б) при постоянном значении сопротивления тормозного реостата Rтрегулируют ток возбужденияIв, изменяя при этом ЭДС двигателя. В результате этого благодаря плавному изменению возбуждения машины можно получить зону регулирования тока якоря ТЭД, состоящую из бесконечного числа позиций регулирования. Минимальная скорость, при которой сохраняется эффективность тормоза, ограничена максимальной величиной тока возбужденияIв max.
На практике оба способа регулирования тормозной силы используются, как правило, совместно. На электропоездах для регулирования тормозной силы переключают ступени тормозного реостата, в качестве которого используется пусковой реостат, а в пределах между этими переключениями изменяют ток возбуждения. На отечественных электровозах переменного тока (например, на ВЛ80С, ВЛ80Т) регулирование тормозной силы выполняют за счет изменения тока возбуждения на выходе выпрямительных установок возбуждения (ВУВ). При этом изменение сопротивления тормозного реостата может быть использовано для повышения эффективности реостатного тормоза в зоне низких значений скорости движения.
На электропоездах (например, на ЭД2Т) двигатели в режиме реостатного торможения в зоне высоких скоростей имеют независимое возбуждение, а при низких скоростях – последовательное, что позволяет наиболее полно использовать возможности данного типа электрического тормоза.
На некоторых сериях электропоездов постоянного тока (например, на ЭР2Т, ЭР2Р, ЭД4М) реостатный тормоз совмещен с рекуперативным. При этом в зоне высоких скоростей, когда ЭДС двигателя значительная, осуществляется рекуперативное торможение, а в зоне низких скоростей – реостатное.