

3.2.1 Синтез компоновочных схем оборудования скважинных штанговых насосных установок для добычи нефти
Наземный привод - наиболее сложная часть УШСН, которая должна выполнять следующие функции:
- создавать возвратно-поступательное движение колонны насосных штанг с необходимым темпом;
- обеспечивать силовое уравновешивание системы подъема продукции пласта;
- допускать регулирование режима откачки продукции;
- позволять осуществление технического диагностирования скважинного оборудования без остановки процесса отбора продукции.
Из огромного разнообразия принципиально возможных технических средств, способных осуществлять указанные функции, наибольшее распространение во всем мире получил привод механического принципа действия, названный у нас балансирным станком-качалкой. Интересно отметить, что основная деталь - балансир, давшая название всему приводу, должна была бы в соответствии с теорией механизмов и машин правильно называться коромыслом, но это название не привилось.
Балансиры выполняются либо в виде рычага первого рода и тогда станки-качалки считаются механизмами с двуплечим балансиром (рис. 1, а), либо в виде рычага второго рода и тогда станок-качалка будет с одноплечим балансиром (рис.1, б).
В станках-качалках с двуплечим балансиром опора балансира С находится посредине - между точкой подвеса штанг D и точкой сочленения шатуна с балансиром В, тогда как в станках-качалках с одноплечим балансиром опора С расположена на конце балансира, а точка В - посредине.
Механизмы с двуплечим балансиром и механической системой уравновешивания часто для отличия от всех остальных называют обычными.

Рис.3.15. Балансирные станки-качалки: а-с двуплечим балансиром; б-с одноплечим балансиром
Полную механическую схему любого обычного станка-качалки (рис.3.15) можно разделить на механическую трансмиссию и преобразующий механизм.
Трансмиссия - совокупность деталей и механизмов, передающих вращающее движение от двигателя к преобразующему механизму. В станках-качалках трансмиссией можно назвать кинематическую цепь между двигателем и осью вращения кривошипа, служащую для снижения высокой частоты вращения, создаваемой двигателем, до требуемой небольшой частоты вращения кривошипа преобразующего механизма. В свою очередь последняя определяет число двойных ходов балансира станка-качалки в единицу времени. Трансмиссия может включить от одной до нескольких механических передач и возможных конструктивных комбинаций компоновки трансмиссий очень много. Практически же наиболее типичная трансмиссия состоит из сочетания клинорсменной передачи и зубчатого редуктора, как это показано на рис.3.16.
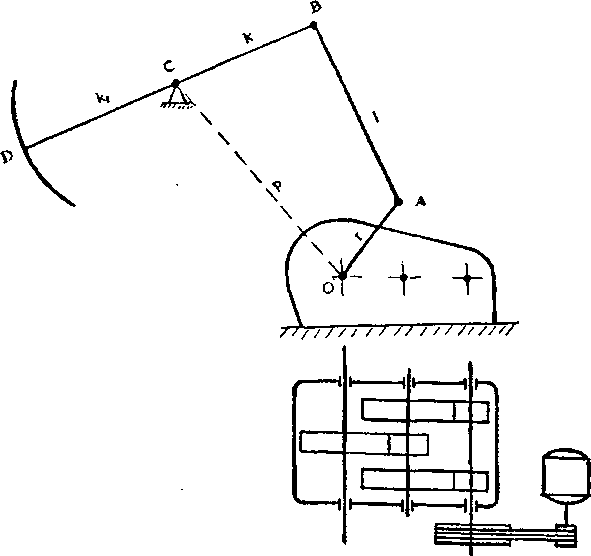
Рис. 3.16 Кинематическая схема станка-качалки
Преобразующий механизм служит для преобразования вращательного движения на валу кривошипа в возратно-поступательное движение точки подвеса штанг. В подавляющем большинстве установок преобразующий механизм представляет собой по точному определению сдвоенный шарнирный четырехзвенный кривошипно-коромысловый механизм с одностронним коромыслом. Как уже было сказано, механизм обычно называют кривошипно-шатунным балансирным.
Четырсхзвснник ОАВС образуется подвижными звеньями в виде кривошипа ОА= г, шатуна АВ = 1, заднего плеча балансира ВС = k и неподвижным звеном ОС, представляющим собой рас-
стояние между осями вращения кривошипа О и качания балансира С. В расчетах неподвижное звено ОС обозначается через р и носит название полюсного расстояния или базы. Практически это расстояние определяется относительным расположением редуктора и опоры балансира на стойке.
Четырехзвенный механизм определяет закон движения балансира. Переднее плечо балансира k1 на характере движения точки подвеса штанг не отражается, но влияет на длину ее хода. В станках-качалках применяют либо равноплечие балансиры с k1 = k, либо балансиры с удлиненным передним плечом k1 > k, позволяющим получить увеличенную длину хода при одинаковом четырехзвенном механизме.
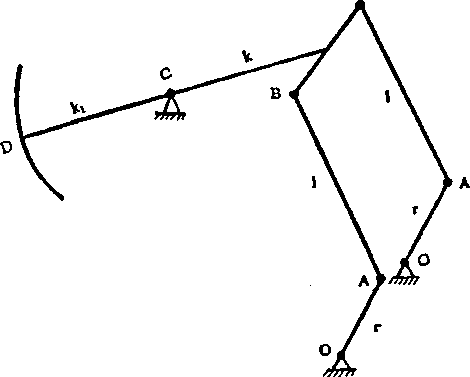
Рис.3. 17 Кинематическая схема преобразующего
механизма станка-качалки в аксонометрии
Из схемы видно, что каждое плечо балансира - коромысла может совершать качательные движения только по одну сторону от вертикали, проходящей через центр качания С, поэтому дан ный механизм считается односторонним. Механизм станка-качалки является сдвоенным, т.к. движение от редуктора к балансиру осуществляется двумя параллельно работающими кривошипно-шатунными механизмами, связанными с балансиром посредством поперечной траверсы ВВ (рис.3.17). Это создает симметричное распределение нагрузки на весь механизм, делает установку более устойчивой и позволяет избежать неблагоприятное консольное приложение нагрузки к балансиру, кривошипу, редуктору.
Станок-качалка представляет собой механизм с одной степенью свободы, поэтому закон движения балансира и связанной с ним колонны насосных штанг определяется геометрическими и кинематическими параметрами преобразующего механизма: размерами, взаимным расположением подвижных и неподвижного звеньев, соотношением звеньев r /l, r/k, r/p, k1/k и скоростью вращения кривошипов.
В зависимости от расположения центра вращения кривошипов (точки О) относительно точки В сопряжения шатунов с балансиром механизм станков-качалок может быть аксиальным или дезаксиальным, что отражается на эксплуатационных показателях штанговой установки.