

8.2. Закон сохранения импульса. Центр инерции. Закон движения центра инерции
Закон сохранения импульса является прямым следствием второго и третьего законов Ньютона.
При этом для изолированного тела он является очевидным следствием второго закона, так как если на тело не действуют никакие силы, то его скорость, а значит, и импульс остаются постоянными. В случае нескольких взаимодействующих между собой, но не подвергающихся воздействию внешних сил, тел (в изолированной системе), этот закон является следствием обоих законов.
Если механическая система состоит из нескольких тел, то согласно третьему закону Ньютона, силы, действующие между этими телами, равны по величине, но противоположны по направлению, а геометрическая сумма внутренних сил равна нулю.
Рассмотрим некоторую систему, состоящую из n тел массами m1, m2, ..., mn, каждое из которых движется соответственно со скоростями v1, v2, ......, vn.
Уравнение движения каждого из тел имеют вид
![]() ;
;
![]() ;
;
…………………….;
![]() ,
(8.7)
,
(8.7)
где
![]() -
равнодействующие консервативных
внутренних сил, действующих на каждую
из масс;
-
равнодействующие консервативных
внутренних сил, действующих на каждую
из масс;
![]() -
равнодействующие внешних сил, действующих
на каждую из масс;
-
равнодействующие внешних сил, действующих
на каждую из масс;
Сложив эти уравнения, получим
![]() (8.8)
(8.8)
или
![]() ,
(8.9)
,
(8.9)
где
![]() - импульс системы;
- импульс системы;
![]() -
равнодействующая всех внутренних сил
системы;
-
равнодействующая всех внутренних сил
системы;
![]() -
равнодействующая всех внешних сил,
действующих на систему.
-
равнодействующая всех внешних сил,
действующих на систему.
Так как сумма внутренних сил равна нулю, то
![]() .
(8.10)
.
(8.10)
Таким образом, скорость изменения полного импульса замкнутой системы равна геометрической сумме внешних сил, действующих на систему. Следовательно, полный импульс замкнутой системы может изменяться только под действием внешних сил.
В отсутствие внешних сил
![]() ,
а p
= const.
(8.11)
,
а p
= const.
(8.11)
Это выражение и является математической формой записи закона сохранения импульса, который утверждает: "Полный импульс замкнутой системы в отсутствие внешних воздействий остается величиной постоянной".
Рис.8.1
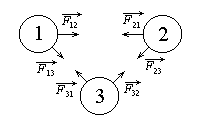
В данном случае полный импульс системы
![]() .
(8.12)
.
(8.12)
Возьмем производную по времени
![]() .
(8.13)
.
(8.13)
Выражение (8.13) - векторная сумма 3-х сил, действующих на каждое из рассматриваемых тел (второй закон Ньютона). Каждую из указанных сил в свою очередь можно представить в виде векторной суммы сил, действующих на данное тело со стороны двух других тел:
![]() ;
;
![]() ;
;![]() .
(8.14)
.
(8.14)
Подставляя (8.14) в (8.13), получим
![]() . (8.15)
. (8.15)
В силу третьего закона Ньютона
![]() ;
;
![]() ;
;![]() .
(8.16)
.
(8.16)
В результате чего сумма сил (8.15) обращается в нуль. Равенство производной нулю означает, что полный импульс системы не зависит от времени, т.е. является постоянной величиной, что и требовалось доказать.
Надо отметить, что реальные системы могут быть замкнутыми только при определенных условиях (в каком-либо направлении), в этом случае можно утверждать, что закон сохранения импульса справедлив только при этих условиях (в данном направлении)
![]() ,
а px
= const.
(8.17)
,
а px
= const.
(8.17)
Закон сохранения импульса справедлив не только в классической физике. Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц, взаимодействия между которыми подчиняются законам квантовой механики. Этот закон универсален, является одним из фундаментальных законов природы и следствием определенного свойства симметрии пространства - его однородности. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора места положения начала координат инерциальной системы отсчета.
Надо отметить, что импульс незамкнутой системы также сохраняется, если геометрическая сумма всех внешних сил равна нулю.
В классической механике из-за независимости массы от скорости импульс системы может быть выражен через скорость ее центра масс.
Центром масс (или центром инерции) системы называется воображаемая точка С, положение которой характеризует распределение массы этой системы, которая определяется радиус-вектором
 ,
(8.18)
,
(8.18)
где mi и ri - соответственно масса и радиус-вектор i-й материальной точки;
n - число материальных точек в системе.
Скорость центра масс
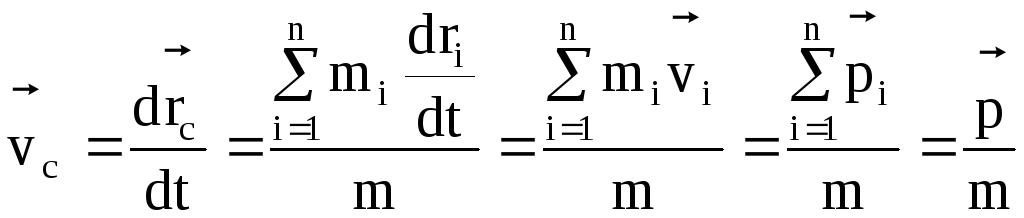 , (8.19)
, (8.19)
где
![]() - полный импульс системы.
- полный импульс системы.
Из (8.19) можно написать
p = mvc, (8.20)
т.е. полный импульс системы равен произведению массы системы на скорость ее центра масс.
Подставив (8.20) в уравнение (8.10), получим
![]() .
(8.21)
.
(8.21)
Таким образом, центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует равнодействующая всех внешних сил (уравнение движения центра масс и воображаемой материальной точки имеют один и тот же вид).
Выражение (8.21) представляет собой закон движения центра масс.
В соответствии с (8.21) из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остается неподвижным.