

Простая модель распознавания образов.
Простая схема распознавания содержит два основных блока: датчик и классификатор.
Датчик представляет
собой устройство, преобразующее
физические характеристики объекта,
подлежащего распознаванию, в набор
признаков
![]() ,
которые характеризуют данный объект.
Классификатор представляет собой
устройство, относящее каждый
поступающий на его вход допустимый
набор значений к одному из конечного
числа классов (категорий), вычислив
множество значений решающих функций.
,
которые характеризуют данный объект.
Классификатор представляет собой
устройство, относящее каждый
поступающий на его вход допустимый
набор значений к одному из конечного
числа классов (категорий), вычислив
множество значений решающих функций.
Считается, что
система распознавания допускает ошибку
в том случае, если она относит к классу
wjобъект, на самом деле принадлежащий
отличному отwjклассу. Считается, что система распознаванияR1лучше
системы распознаванияR2,
если вероятность совершить ошибку для
системыR1меньше, чем для системыR2.Датчик выдает информацию в виде вектора![]() ,гдеп—число измеренных характеристик
каждого физического объекта. Предполагается,
что вектор измеренийхпринадлежит
одному изМклассов образовw1,
w2, . . . ,
wm.
,гдеп—число измеренных характеристик
каждого физического объекта. Предполагается,
что вектор измеренийхпринадлежит
одному изМклассов образовw1,
w2, . . . ,
wm.
Принимаем допущение о том, что априорныевероятности появления объектов каждого класса одинаковы, т. е. векторхможет с равной вероятностью относиться как к одному, так и к другому классу. Пустьр(х | wi)=pi(х)есть плотность распределения для векторахпри условии, что он принадлежит классуwi. В таком случае вероятность того, что на самом деле векторхпринадлежит классуwj, определяется выражением
 .
.
Вероятность того, что вектор хне принадлежит классуwj, определяется выражением
 ,
,
задающим вероятность ошибки.
Решающая функция представляет собой функцию d(x),относящуюхточно к одному изМзаданных классов. Оптимальной считается решающая функцияd°(x), которая дает наименьшую вероятность ошибки при всех допустимых значениях х, Значениеj, при котором величина1 – рj, будет наименьшей, совпадает с тем значениемj, которому соответствует наибольшее значение вероятностир(х|wj). Итак, оптимальная решающая функция d°(x)относит набор х к классуwiв том и только том случае, если выполняются неравенства
![]()
или
![]() .
.
При р(х|wi)=р(х|wk)ир(х|wi)>р(х|wj), j=1, 2, .... M, jik,оптимальная решающая функцияd°(х)может отнести векторхкак к классуwi, так и к классуwk. Для заданного значенияхклассификатор определяет оптимальную решающую функцию.
Допустим, наконец, что измеренные значения распределены нормально и соответствующие ковариационные матрицы имеют вид
 ,
,
где cij– ковариацияi-й иj-й компонент вектора измеренийx, а cij – дисперсияi-й компоненты измеренийx. Поскольку в случае нормального распределения имеем
![]() ,
,
где mi–вектор математического ожидания, отношение двух плотностейp(x|wi)иp(x|wj)определяется выражением
![]()
Так как ковариационная матрица симметрична, данное отношение условных вероятностей сводится к следующему:
![]() .
.
Введем величину
![]() ;
;
тогда получим выражения для разделяющей функции
![]() .
.
Для определения оптимальной разделяющей функции следует вычислить М(М–1) значений функцийrij(х)для всехi, j, ij и выбрать наибольшее из полученных значений. Если окажется что этот максимум равенrkj, то относимхк классуwk. Схема оптимального распознавания, воспроизводящая описанный метод, приведена на рис. 10.6.
Отметим, что
уравнение![]() описывает гиперплоскость, проведенную
вn-мерном пространстве
и разделяющую его в случае наличия двух
классов на две части:
описывает гиперплоскость, проведенную
вn-мерном пространстве
и разделяющую его в случае наличия двух
классов на две части:
![]()
Следовательно, уравнение rij=0определяет разделяющую поверхность дляi-го иj-го классов образов.
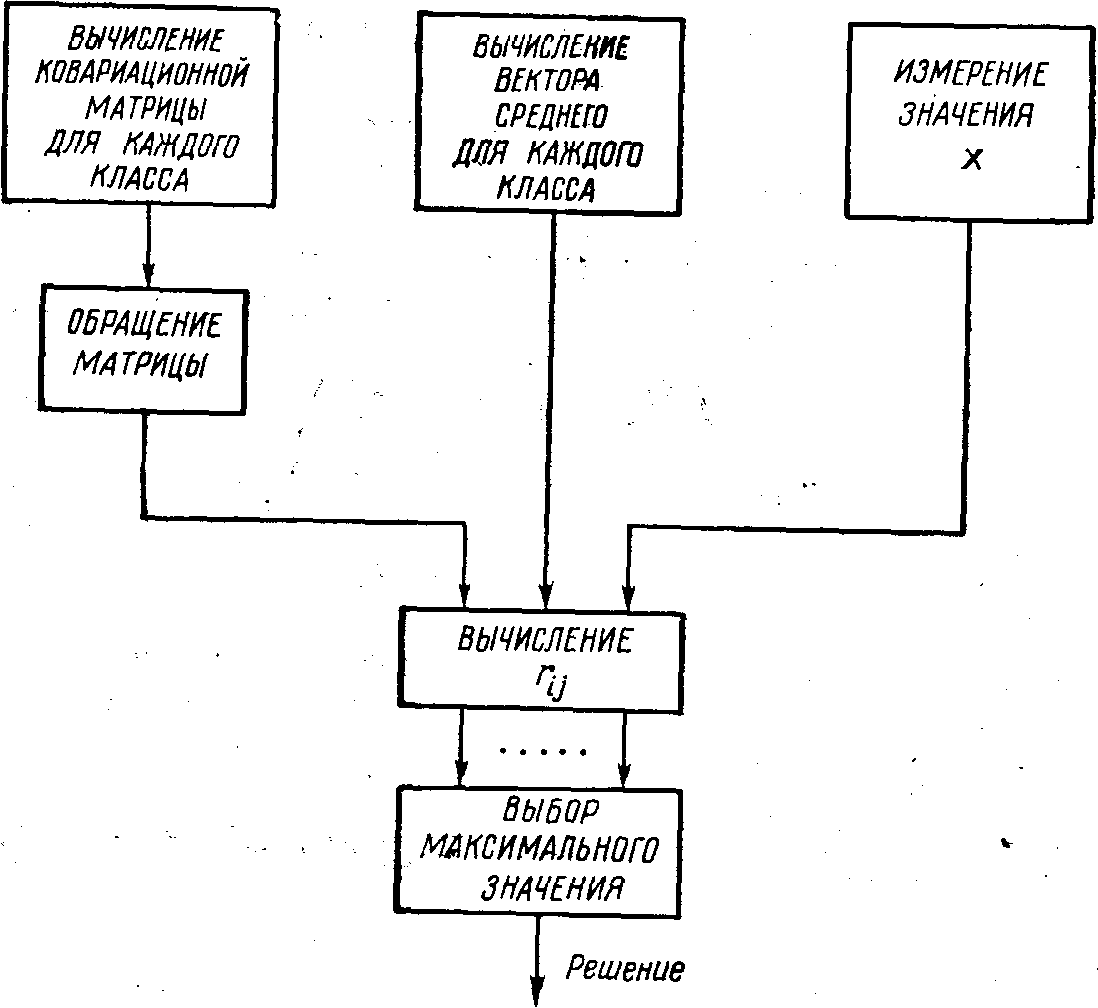
Рис. 10.6. Пример простой схемы распознавания образов.