

Основы электропривода
Общие сведения об электроприводе
Э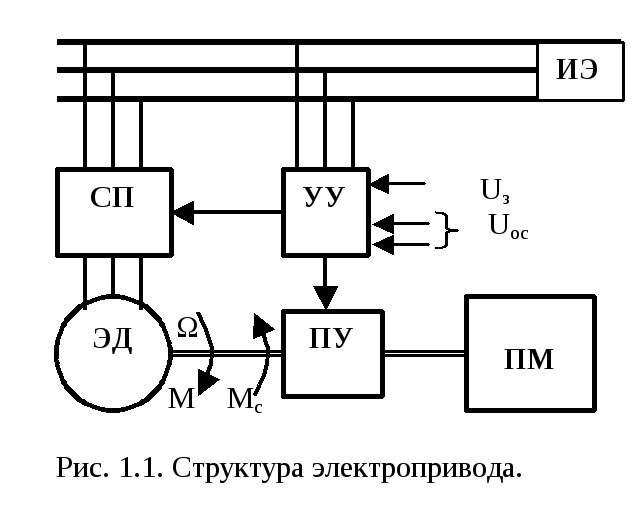 лектрическим
приводом (или просто электроприводом)
называют электромеханическую систему
для приведения в движение механизмов
и машин при помощи электродвигателя.
В состав электропривода могут входить
также, силовой преобразователь,
передаточный механизм и устройство
управления. Обобщенная структура
электропривода показана на рис. 1.1.
лектрическим
приводом (или просто электроприводом)
называют электромеханическую систему
для приведения в движение механизмов
и машин при помощи электродвигателя.
В состав электропривода могут входить
также, силовой преобразователь,
передаточный механизм и устройство
управления. Обобщенная структура
электропривода показана на рис. 1.1.
При работе производственной машины (ПМ) электродвигатель (ЭД) получает электроэнергию от источника энергии (ИЭ) через силовой преобразователь (СП) и преобразует её в механическую энергию. Силовой преобразователь служит для получения электроэнергии с требуемыми для электродвигателя параметрами и управления потоком этой энергии. Управляет работой электропривода устройство управления (УУ). Для этого на него поступают сигналы задания режима работы электропривода (Uз) и сигналы обратных связей (Uoc) от датчиков, контролирующих работу электропривода. Силовой преобразователь, электродвигатель и устройство управления образует электрическую часть электропривода.
Механическая энергия от электродвигателя передается к исполнительным органам производственной машины через передаточное устройство (ПУ), которое преобразует параметры механического движения (скорость, момент, вид движения). Вращающийся ротор, передаточное устройство и движущиеся части производственной машины (ПМ) составляют механическую часть электропривода. Реальную кинематическую схему обычно заменяют эквивалентной одномассовой схемой относительно электродвигателя.
Работа системы электропривод - производственно-технологическая машина связана с действием различных сил и моментов. Момент М, создаваемый электродвигателем, приводит в движение всю механическую систему. Момент статической нагрузки Mc, образуемый сопротивлением механической системы, трением в узлах передачи движения, противодействует движению электродвигателя.
Основное уравнение движения электропривода, позволяющее описать характер его движения при определенных допущениях, имеет вид:
![]() , (1.1)
, (1.1)
где J- момент инерции системы, приведённый к валу электродвигателя, кгм2;
Ω- частота вращения двигателя, рад/с.
Вращающий момент, развиваемый электродвигателем, связан с механической мощностью электродвигателя известным соотношением:
![]() , (1.2)
, (1.2)
где n- частота вращения двигателя,n= 60Ω/ 2= 9,55Ω , об/мин.
Если в паспорте электродвигателя номинальный момент Мномне указывается, то его значение, а также максимальный Ммахи пусковой Мпмоменты могут быть найдены через номинальную мощностьPном и частоту вращения в номинальном режимеnномпо выше указанной формуле (1.2), а также по отношениям моментов (Ммах/Мном) , (Мп/Мном), приводимым в паспортных данных.
Статический момент Mc является суммарным моментом сил сопротивления всех звеньев механизма, приведённых к валу электродвигателя:
![]() , (1.3)
, (1.3)
где Мci- момент сопротивленияi-го звена, приведённый к валу ротора.
Приведение статических моментов отдельных звеньев к валу двигателя производится на основе закона сохранения энергии (мощности) движения: для звена, совершающего вращательное движение с угловой скоростью Ωi:
![]() ; (1.4)
; (1.4)
для звена совершающего поступательное движение с линейной скоростью Vi:
![]() . (1.5)
. (1.5)
Здесь Mi- момент сопротивленияi-roзвена;Fi- сила сопротивленияi-го звена; ηi- КПД передачи от двигателяi-ому звену.
Составляющая уравнения электропривода JdΩ/dtпредставляет динамический момент:
![]() ,
(1.6)
,
(1.6)
который появляется при неравенстве моментов вращающего М и статической нагрузки Мс.
При М ≠ Мсчастота вращения Ω меняется, появляется ускорение (dΩ/dt≠0) и соответствующий ему динамический момент (Мдин=JdΩ/dt). Электропривод, при этом, работает в переходном режиме. При равенстве М=Мс, скорость Ω =const; ускорениеdΩ/dt=0, Мдин= 0 - электропривод работает в установившемся режиме или Ω =0.
Отдельные звенья и элементы механической системы электропривода движутся с разными скоростями. При переходе от реальной кинематической схемы к эквивалентной одномассовой схеме момент инерции определяют как сумму моментов инерции движущихся элементов системы, приведенных к скорости электродвигателя (Ω). Приведение осуществляется из условия сохранения кинетической энергии движущихся звеньев:
![]() , (1.7)
, (1.7)
где Jk – момент инерцииk-го звена механической системы электропривода, вращающегося с угловой скоростью Ωk.
mi– массаi-го звена системы электропривода, движущегося поступательно с линейной скоростьюVi;
Jдв– момент инерции вращающихся частей электродвигателя. Уравнение (1.1) позволяет проанализировать различные режимы работы электромеханической системы: определить время пуска двигателя (время переходного процесса при пуске), время остановки, выбег, рассчитать и построить нагрузочные диаграммы момента и мощности. Нагрузочные диаграммы, т.е. графические зависимости момента нагрузкиM(t) или мощности нагрузкиP(t) от времени, позволяют рассчитать и выбрать мощность двигателя для электропривода.