

Определение времени переходных режимов
Время переходных режимов (пуск, торможение, переход от одной скорости к другой) определяется путем решения уравнения движения электропривода (1.1) относительно времени:
![]() (1.8)
(1.8)
Время необходимое для изменения угловой скорости электропривода от начальной Ωндо конечной (установившейся) Ωк:
![]() (1.9)
(1.9)
В простейшем случае, если принять в течение всего переходного процесса M=const,Mc=constиJ=const, то
![]() .
(1.10)
.
(1.10)
Время пуска электропривода (tп) при допущении о постоянстве пускового момента (M=Mп=const) в течение времени пуска из неподвижного состояния(Ωн= 0): до номинальной скорости (Ωk = Ωном):
![]() . (1.11)
. (1.11)
Время остановки двигателя после его отключения (М=0) на скорости Ω при отсутствии тормозных устройств называется временем выбега электропривода:
![]() (1.12)
(1.12)
Данная формула позволяет по измеренным значениям времени выбега tв, скорости Ω и моменту статической нагрузки Мс определить экспериментально момент инерцииJэлектропривода, приведенный к валу ротора.
При наличии тормозных устройств, создающих тормозной момент Мт время остановки (торможения) уменьшается:
![]() . (1.13)
. (1.13)
В уточненных расчетах, когда пренебречь изменением моментов от времени не возможно, прибегают к численному или графоаналитическому интегрированию уравнения (1.9). для этого пользуются механическими характеристиками двигателя Ω(М) и нагрузки Ω(Мс) На рис.1.2 даны пояснения к графоаналитическому методу интегрирования на примере определения времени пуска асинхронного двигателя.
М
 еханические
характеристики двигателя Ω(М) и нагрузки
Ω(Мс) строятся на одном графике.
Ось скоростей разбивается на интервалы
(участки) ΔΩ, одинаковые или разные. Для
каждогоi-того интервала
скорости ΔΩi
определяются средние значения
моментов: вращающегоMi
и момента статической нагрузки Мci
. На основании формулы (1.8), заменяя
приращенияdtиdΩ
на конечные интервалы Δtи ΔΩi , получим
формулу для определенияi-го
интервала времени:
еханические
характеристики двигателя Ω(М) и нагрузки
Ω(Мс) строятся на одном графике.
Ось скоростей разбивается на интервалы
(участки) ΔΩ, одинаковые или разные. Для
каждогоi-того интервала
скорости ΔΩi
определяются средние значения
моментов: вращающегоMi
и момента статической нагрузки Мci
. На основании формулы (1.8), заменяя
приращенияdtиdΩ
на конечные интервалы Δtи ΔΩi , получим
формулу для определенияi-го
интервала времени:
![]() ,
(1.14)
,
(1.14)
где Мдинi =Mi-Mci - средний динамический момент на интервале изменения скорости ΔΩi.
Общее время пуска двигателя:
![]() . (1.15)
. (1.15)
Точность этого метода (метода площадей) зависит от числа интервалов (n). Чем вышеn, тем выше точность конечного результата.
Построение нагрузочных диаграмм
Н
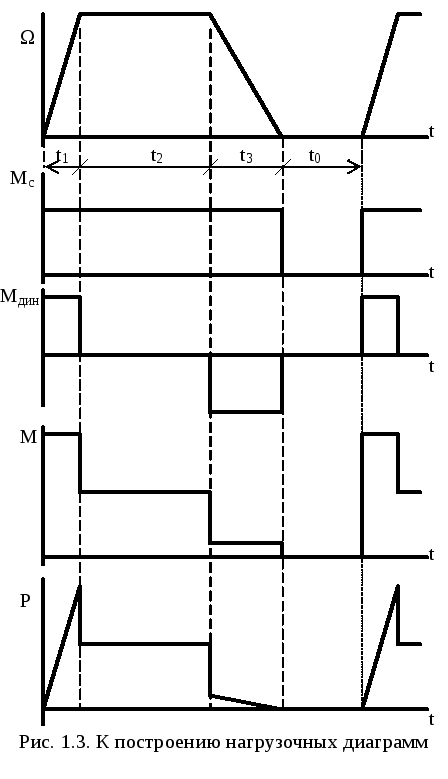 агрузочная
диаграмма определяет зависимость
вращающего момента или мощности двигателя
во времени. При построении нагрузочных
диаграмм электроприводов учитываются
особенности совместной работы двигателя
и приводимого в движение механизма.
Исходными при построении нагрузочных
диаграмм являются цикловые графики
момента статической нагрузкиMc(t)
и диаграммы скорости Ω(t)
(тахограмма). Последовательность
построения нагрузочной диаграммы
отображена на рис. 1.3. Предварительно
рассчитывается и строится диаграммы
скорости Ω(t)
агрузочная
диаграмма определяет зависимость
вращающего момента или мощности двигателя
во времени. При построении нагрузочных
диаграмм электроприводов учитываются
особенности совместной работы двигателя
и приводимого в движение механизма.
Исходными при построении нагрузочных
диаграмм являются цикловые графики
момента статической нагрузкиMc(t)
и диаграммы скорости Ω(t)
(тахограмма). Последовательность
построения нагрузочной диаграммы
отображена на рис. 1.3. Предварительно
рассчитывается и строится диаграммы
скорости Ω(t)
М
Рассмотрим более подробно решение некоторых задач при построении диаграмм, рис. 1.3.
Время цикла работы и пауз между ними определяется технологическим процессом, а время ускорения (пуска) t1и замедления (остановки)t3определяется динамическим или переходным режимом электропривода, что требует знать основные технические параметры электродвигателя, поэтому для расчета времениt1иt3 двигатель выбирают по каталогу, ориентируясь на значение момента статической нагрузки. Если за время работыt1 t2t3 - момент статический не меняется, можно, в первом приближении, двигатель выбирать по каталогу из соотношения:
Мном≥ кдМс; Рном> кдΩМс, (1.16)
где Мном– номинальный момент двигателя;
Рном– номинальная мощность двигателя;
кд– коэффициент, учитывающий динамический режим работы двигателя, (кд=1.05…1.25);
Ω - скорость двигателя (если скорость не задана, для асинхронных двигателей можно взять предварительно синхронную скорости Ωс).
Проверка предварительно выбранного электродвигателя с помощью уточнённых расчётов приведена ниже в п.п. 1.6.