

9. Дискретные системы управления.
Наряду с электронными средствами автоматизации широкое применение находят и пневматические. Целесообразность применения средств пневмоавтоматики обусловлена следующими их свойствами:
обеспечение пожаро- и взрывобезопасности объектов за счет использования в качестве рабочей среды сжатого воздуха;
удобство сочетания с пневматическими датчиками (расхода, давления, уровня и т.д.) и исполнительными механизмами, устанавливаемыми на объектах (в химии и нефтепереработке 94% всехисполнительных механизмов - пневматические);
высокие надежностные показатели пневматических средств (срок службы пневмосистем достигает 10-15 лет при многомесячной и круглосуточной работе объектов в межремонтный период, который часто составляет 8-12 месяцев);
простота и удобство обслуживания;
нечувствительность к помехам от электромагнитных полей;
низкая стоимость.
К недостаткам пневматических средств следует отнести их низкое быстродействие и сложность построения больших вычислительных устройств.
Тем не менее пневматические средства автоматизации находят широкое применение в химической, нефтеперерабатывающей, газовой, пищевой, лакокрасочной, металлургической отраслях промышленности, а также в машиностроении, медицине, сельском хозяйстве, полиграфии и т.д.
9.1 Законы и основные соотношения алгебры логики.
Для проектирования рациональных систем дискретного действия необходимо уметь оперировать с булевыми функциями. С этой целью рассмотрим основные законы и соотношения алгебры логики.
1. Закон перестановки
ху = ух
х + у = у + х
2. Сочетательный закон
(ху)z = х(уz),
(х+у)+z = х+(у+z),
3. Распределительный закон
х(у+z) = ху+xz,
х+уz = (х+у)(x+z),
4. Закон повторения
хх...х = х,
х + х+...+х = х
6. Закон инверсирования
![]()
![]()
7. Основные соотношения между переменной X и переменными величинами 1 и О
X+1 = 1
X * 1 = X
X + 0 = X
X* 0=0
X
+![]() =1
=1
X
![]() =1
=1
Таким образом, аппарат алгебры логики гораздо проще, чем аппарат обычной алгебры, хотя и имеет свои особенности.
9.2 Логические элементы управления
Управление роботом осуществляется набором логических элементов:
Логический элемент "ИЛИ"
Логический пневматический элемент «ИЛИ», выполненный со свободной заслонкой, относится к пассивным, он не требует какого-либо приложения давления. Входной сигнал является результирующей входных сигналов. Уровень выходного сигнала такой же, что и входного сигнала.
Логический элемент «ИЛИ» дает выходной сигнал 3, когда на входе есть либо а, либо b, либо оба сразу. Это соответствует операции логического сложения S = а + b.
Вместо знака «+» можно встретить обозначение v. Операцию логического сложения называют также операцией дизъюнкции.
Сложное высказывание S будет истинным, если а и b в отдельности или оба вместе имеют истинное значение (см. табл. 1)
Таблица 1
-
а
1 1 1 0 1 1 1 0 1 000
b
S
1
0
1
0
1
1
0
0
1
1
1
0
Сигналом а закрывается правое отверстие, и воздух проходит к выходу, не проникая при этом в канал подачи сигнала b.
Таким образом, выходной сигнал имеет место при наличии сигнала а или сигнала b (или обоих сразу).
Элемент «ИЛИ» называют также «переключательной заслонкой» или «селектором цепей».
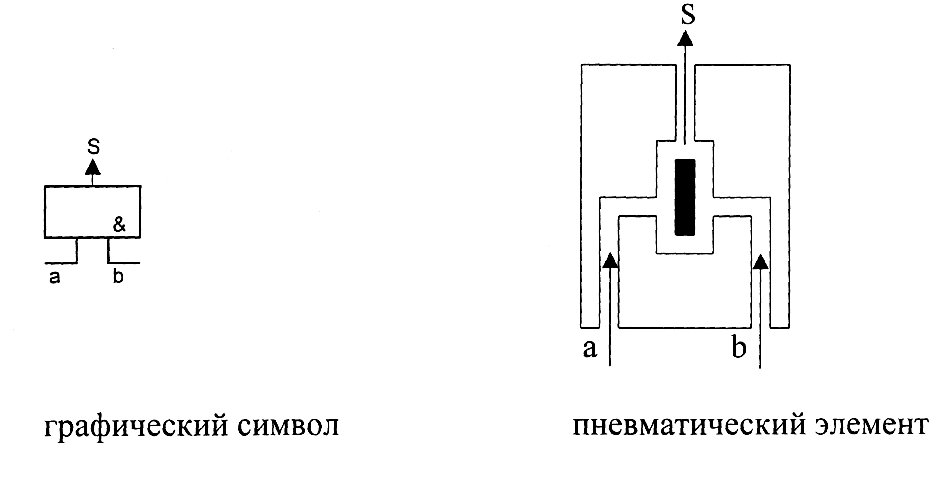
Логический элемент «И».


Логический пневматический элемент «И», выполненный со свободной заслонкой, относится к пассивным, он не требует какого-либо приложения давления. Выходной сигнал является результирующей входных сигналов. Уровень выходного сигнала такой же, что и входного сигнала.
Автономные пневматические элементы обеспечивают построение весьма простых схем. Благодаря их автономности можно с удобством устанавливать их либо в системе управления, либо на самом сверлильном устройстве.
Логический элемент «И» дает выходной сигнал S, когда входные сигналы а и b наличествуют одновременно. Во всех других случаях выходного сигнала не будет (см. табл. 2).
Таблица 2.
-
а
1 1 1 0 1 0 1 0 0 000
b
S
1
0
1
0
1
1
0
0
1
0
0
0
Это соответствует операции логического умножения: S = а*b. Вместо знака «*» можно встретить обозначение ^, &. Сигналом а свободная заслонка сдвигается вправо. Сигналом b свободная заслонка сдвигается влево.
Только при наличии обоих сигналов, а и b, создается выходной сигнал S, т.к. заслонка в этом случае занимает среднее положение.
Вовсе не необходимо чтобы подвижная заслонка находилась в положении равновесия, дабы выполнялась функция "И".
Точное положение заслонки не имеет значения, поскольку ее единственное назначение в том, чтобы пропускать поток воздуха к выходу при одновременной подаче сигналов а и b.
Л огический
элемент " НЕ - ЗАПРЕТ "
огический
элемент " НЕ - ЗАПРЕТ "
варианты
графических символов

Пневматический логический элемент в состоянии покоя
Логический элемент "НЕ" есть обратное пневматическое реле (выходной сигнал обратен задающему сигналу).
Можно также использовать логический элемент "НЕ" для выполнения логической функции "ЗАПРЕТ". С целью высокого быстродействия, в частности при опускании, порог опускания этого элемента сделан высоким. В связи с очевидным различием диаметров коммутирующих отверстий оказывается весьма заметным различие между порогами задающего сигнала и опускания. Благодаря этому различию обеспечивается быстродействие данного устройства при коммутации.
Выходной сигнал S, наличествующий, когда логический элемент "НЕ - ЗАПРЕТ" находится в состоянии покоя, аннулируется, когда поступает задающий сигнал (устройство в сработавшем состоянии):
S
=N0T
а =![]() (см. табл.3),
(см. табл.3),
Таблица 3
-
а
1
0
S
0
1
1
0
0
1
Если питание Р заменено сигналом b, то этот элемент реагирует на логическую функцию "ЗАПРЕТ":
S=
bAND NOT a =
![]()
Логический элемент «Разрешение на восстановление».

Пневматический логический элемент в состоянии покоя
Логический элемент «Разрешение» представляет собой пневматическое восстановительное реле по давлению и по расходу (в качестве чего и используется).
Очевидное различие в диаметрах коммутационных отверстий обуславливает существенное различие в пороговых уровнях активизации и опускания.
Благодаря этим различиям устройство характеризуется быстродействующей коммутацией.
Выходной сигнал появляется, когда имеет место сигнал активизации а:
S =а
Если питание Р заменено на сигнал b, то в таком случае этот элемент отвечает функции «И»:
S = аb
Фазная память

Рис. 9.1. Модульный блок.
Фазная память является частью модульного блока и основным элементом системы пневмоавтоматизации по одинарному циклу. Каждой фазе цикла отвечает один элемент памяти блока или, иначе, фазная память. Последняя выдает команду на выполнение движения, соответствующего данной фазе, и затем получает сигнал о производственной отработке движения. Каждая фазная память размещена на своем основании. Каждое основание содержит ячейку «ИЛИ» и «И». Элементы фазной памяти соединяются
друг с другом автоматически, через свои основания, в ходе функционирования пневмоблока. (см. рис. 9.1). Через весь пневмоблок проходят:
коллектор давлений Р, питающий, начиная с головной сек ции блока, все элементы памяти;
коллектор сброса на ноль Р1 , также соединенный с голов ной секцией блока.
Будучи составным элементом пневмоблока, фазная память закрепляется на основании.
Каждая фазная память содержит:
2 внешних соединителя;
элемент идентификации данной фазы;
фазный индикатор;
органы ручного управления фазой:
перевод в состояние 1;
перевод в состояние 2.
Функционирование. Фазная память переводится в состояние 1 сигналом с ячейки "И" предшествующего элемента памяти. Выход данного элемента фазной памяти обеспечивает три действия:
Генерируется сигнал управления 8, предусмотренный для данной фазы цикла.
Сбрасывается на нуль через ячейку "ИЛИ" предшествую щая память.
Подается сигнал на вход элемента "И".
По окончании движения, вызываемого сигналом 8, ответный сигнал поступает на другой вход ячейки "И", с которой подается сигнал перевода в положение 1 следующей фазной памяти.
Конструктивно состав пневмоблока (набора управляющих движений), выполненный из готовых элементов, состоит из элементов фазной памяти + 2 оконечных элемента + элементы ответвления (если надо) (см. рис. 9.2).

Рис. 9.2
а) элемент вхождения в цикл;
б) элемент выхода из цикла;
Р - вход в коллектор давления, питающий , начиная с головной секции все элементы
К - вход в коллектор сброса на ноль, также соединенный с головной секцией блока
Преимущества модульной схемы:
Выполнение последовательного цикла является простейшим.
Отработка последовательного цикла визуализируется: в ка ждый момент времени визуальный индикатор показывает актив ную фазу блока.
Цикл может отрабатываться только в предусмотренном по рядке, случайный ответный сигнал не может произвести возму щающего действия (только ячейка "И" активной фазы находится в состоянии пропускания).
Типичный пример использования: при использовании многопозиционного пневмоблока (см. рис.9.1), рассмотренного в данном примере, выполнение последовательного цикла является простой задачей (настоящий пример является
"схематическим "). Данная типичная пневматическая машина имеет:
цилиндр "А" для перемещения заготовки;
цилиндр "В" для формирования заготовки;
цилиндр "С" для выталкивания изделия.
Для цилиндра "А":
"А+" означает выдвижение штока поршня;
"А-" означает обратное движение штока .
Сигнал "а+", подаваемый на золотник цилиндра "А" есть команда на выполнение движения " А+" .
Сигнал "а-", подаваемый на золотник цилиндра "А" есть команда на выполнение движения "А-" .
Цилиндру «А» приданы два концевых выключателя «а1» и «а0».
Выключатель «а0» есть концевой выключатель, который является «задействованным», когда машина находится в состоянии покоя.
1. Простые циклы Цикл
Перемещение заготовки А+;
Форматирование заготовки В+;
Возврат «В» В-;
Выталкивание С+;
Возврат «С» С-;
Возврат «А» --А-.
Каждой фазе цикла соответствует фазная память блока. Для выполнения отработки вышеописанного цикла требуются шесть элементов фазной памяти.
Схема соединения пневмоблока является, таким образом, простейшей:
- с выходом каждой фазной памяти подается непосредствен но команда на выполнение движения, отвечающая данной фазе;
- ответный сигнал, показывающий окончание операции, поступает на вход соответствующей фазной памяти (см. рис. 9.3).

Рис. 9.3 Структурная схема простого цикла.
2. Циклы с повторными движениями
Некоторые движения можно повторять несколько раз в рамках одного и того же цикла.
Пример: несколько выдвижений и обратных движений штока поршня в рамках одного и того же цикла.
№ фазы движение
А+
В+
А-
С+
А+
А-
С-
В-
С целью избежания нежелательных соединений между фазами, которым отвечает одно и то же движение, следует
и золироватьвыходы
элементов фазной памяти с использование
дополнительной
функции «ИЛИ» (см. рис. 9.4).
золироватьвыходы
элементов фазной памяти с использование
дополнительной
функции «ИЛИ» (см. рис. 9.4).
Рис. 9.4 Структурная схема цикла с повторным движением.