9.3Принцип функционирования системы управления циклового пневматического робота
Рис.
9.5 Кинематическая схема робота.
Приводные элементы обозначены следующими буквами (рис. 9.6):
А - цилиндр двойного действия для поворота основания манипулятора;
В - цилиндр одностороннего действия для опускания манипулятора;
C - цилиндр одностороннего действия для зажима схвата;
D - цилиндр двойного действия для подачи и возврата схвата;
Е - цилиндр двойного действия для поворота схвата;
Н - пневматическое сверлильное устройство.

Рис. 9.6 Силовая схема манипулятора.
Обозначим сигналы управления:
«А+» - поворот по часовой стрелки основания манипулятора;
«А-»-" - поворот против часовой стрелки основания манипулятора ;
«В+»- поднятие манипулятора;
«В-» опускание манипулятора;
«С+»- зажимание схвата;
«О» - отпускание схвата;
«В+»- подача охвата;
«В-«- возврат охвата;
«Е+»- поворот охвата по часовой стрелке;
«Е-«- поворот схвата против часовой стрелки;
«Н+»- подача и поворот сверлильного станка;
«Н-«- возврат станка.
Питание приводных элементов А, В, С, D, Е производится посредством нескольких двухпозиционных клапанов. Перед включением силовой цепи убеждаются, что положение покоя манипулятора отвечает положению покоя клапанов, т.е.
«А+»- в нулевом положении;
«А-»- в активном положении;
«В»- в нулевом положении;
«С» - в нулевом положении;
«В+» - в нулевом положении;
«В-»- в активном положении;
«Е+» - в нулевом положении;
«Е-» - в активном положении;
«Н+» - в нулевом положении;
«Н-» - в активном положении.
Каждому сигналу управления соответствует сигнал о выполнении движения по следующей схеме:
«А+» а1;
«А-» а0;
«В+» в1;
«В-» в0;
«C+» с1;
«О» c 0;
«D» ------- d1;
«D» ------- d0;
«E+» e1;
«E» e0;
«Н+» h1;
«Н-» ---------h0.
Эти сигналы получают посредством логических пневматических элементов "НЕ - ЗАПРЕТ". На элементы "НЕ-ЗАПРЕТ" сигнал поступает непосредственно от камер, положительной и отрицательной, соответствующих приводных элементов. Когда, к примеру, получают сигнал "D-", положительная камера цилиндра "D" находится в состоянии выпуска воздуха ; в результате начинает понижаться уровень сигнала "S5", и когда он достигает уровня сигнала 0.5 Бар (при давлении питания 6 Бар), элемент "НЕ - ЗАПРЕТ "Р/12, на который поступает сигнал "S5" выдает сигнал а0, который, следовательно, показывает, что выполнено движение "D-".
Следует отметить:
- наличие логических элементов «ИЛИ» для «сбора» сигналов, относящихся к повторным движениям (с целью избежания нежелательных соединений между фазами, которым отвечает одно и то же движение, следует изолировать выходы элементов фазной памяти с использованием элементов "ИЛИ"). Например, сигнал "D+" поступает от трех элементов фазной памяти цепи пневмоблока и "собирается " в элемент "ИЛИ".
необходимость восстановления (по давлению и расходу) некоторых сигналов, таких как D и Н+, применяя для этого надлежащим образом логические элементы "разрешение на восстановление".
наличие логических элементов "И" необходимых для правильного функционирования некоторых узлов схемы , например , узла , связанного со счетчиком цикла, (на один вход элемента "И" подается сигнал об окончании цикла, а на другой - сигнал со счетчика циклов , который подастся до тех пор , пока необходимое число циклов на выполнено;
с выхода элемента "И" сигнал поступает на первый элемент фазнойпамяти; соответственно, циклы выполняются, когда на входах элемента "И" есть оба сигнала) (см. рис. 9.7).

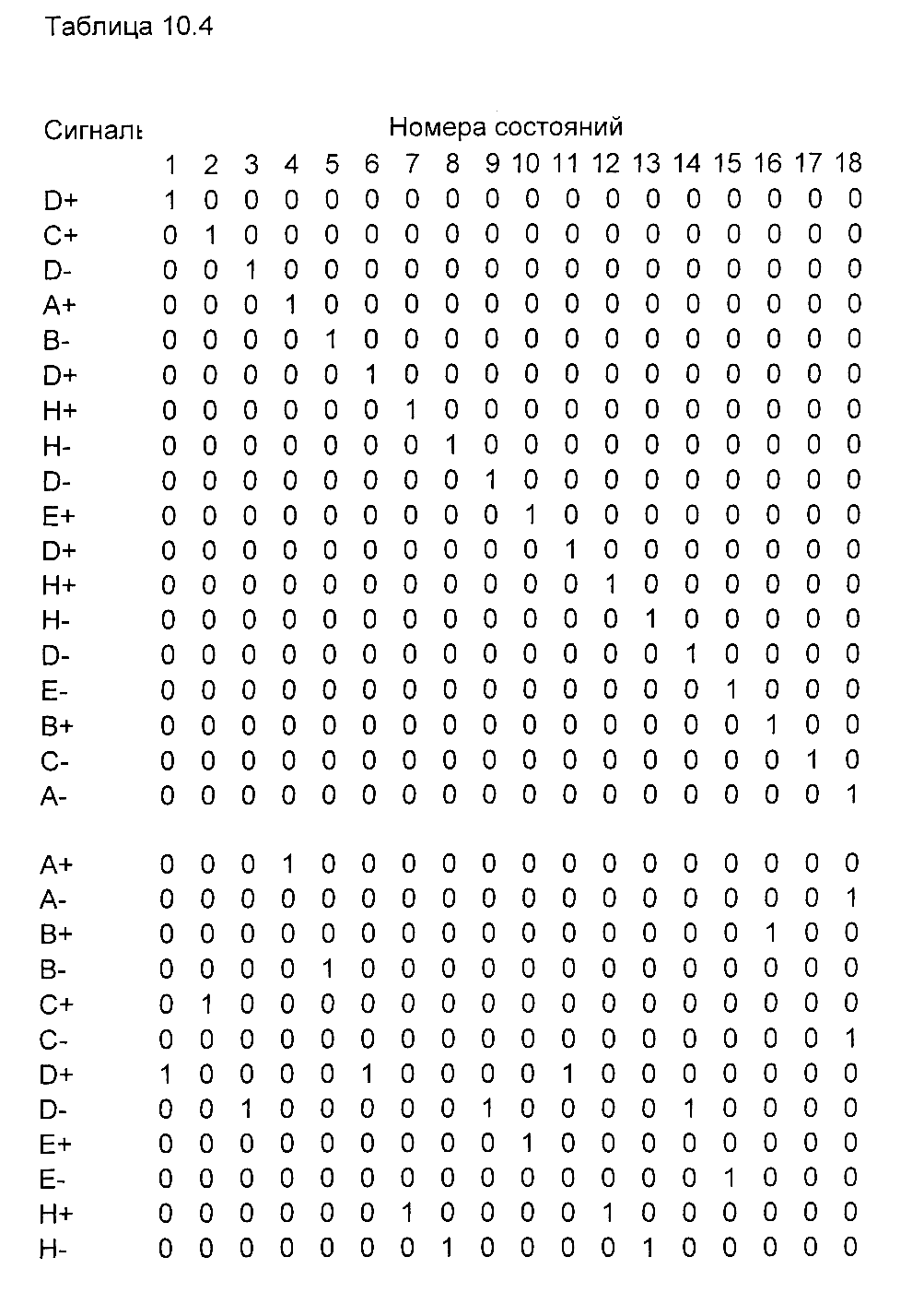
Работа схемы иллюстрируется следующей таблицей состояний. Таблица состояний строится по следующему принципу:
а) условно таблицу можно разделить на две части – верхнюю и нижнюю;
б) в верхней части записываются все возможные варианты входных воздействий (на каждом шаге выполнения цикла единица может быть только на одном элементе фазной памяти, т.к. робот может выполнять движения только последовательно);
в) в нижней части таблицы записываются все выходные со стояния, соответствующие входным.