10.2 Синтез систем управления несколькими исполнительными устройствами.
Требуется спроектировать пневматическую избирательную систему по следующим условиям. Имеются четыре исполнительных устройства, штоки которых находятся в исходном положении (рис. 10.2). Необходимо, чтобы в зависимости от комбинации состояний двух нормально закрытых переключателей х1 и х2 на входе выдвигался шток одного из
исполнительных устройств: первого - при обоих открытых переключателях х1 и х2, второго - при открытом х2 и закрытом х1 третьего - при открытом х1 и закрытом х2; четвертого - при обоих закрытых переключателях х1 и х2.
Подобная система может быть использована, например, в контрольно-сортировочных автоматах для отбраковки изделий по результатам измерений двух каких-либо размеров. Автомат выполняется таким образом, что в случае недопустимого отклонения размера изделия от номинального в сторону уменьшения непроходная скоба проходит вниз и открывает расположенный против нее переключатель. Сигналы от переключателей, служащих в данном случае датчиками положений измерительных скоб, поступают через систему управления к распределителям. В зависимости от комбинации входных сигналов переключается один из распределителей, в результате чего поршень соответствующего устройства совершает ход вперед. Шток каждого поршня связан с заслонкой бункера и, если заслонка открыта, то изделие после измерения попадает в один из четырех бункеров. Таким образом, в первом бункере будут собраны, например изделия, забракованные по двум размерам, во втором и в третьем - забракованные по одному размеру, а в четвертом бункере будут находиться годные изделия.
Здесь представлена только часть пневматической системы контрольно-сортировочного автомата, потому что необходимо еще возвращать поршни ИУ в исходные положения, поднимать и опускать измерительные скобы (также при помощи пневматических устройств), подавать изделие на контрольную позицию. Все эти процессы должны быть увязаны между собой, чтобы, например, опускание скоб не начиналось раньше, чем новое изделие поступит на рабочую позицию и т. п. Однако для упрощения задачи ограничиваются только участком системы, управляющим ходом поршней исполнительных устройств вперед в зависимости от сигналов х1 и х2.

Рис. 10.2 Система управления четырьмя исполнительными устройствами от двух переключателей.
Этот участок системы управления схематично представлен на рис. 10.2а, где показаны два входных сигнала х1, х2 и четыре выходных сигнала f1, f2, f3, f4, каждый из которых подается в полость управления соответствующего распределителя.
Приведенное выше описание условий работы системы может быть заменено таблицей состояний (табл. 10.1).

Первый столбец таблицы выражает условие срабатывания устройства 1: переключатель x1, открыт (x1 = 1) и переключатель х2 открыт (x2 = 1); подана команда на перемещение вперед поршня первого устройства (f1 = 1), т. е. полость управления распределителя этого устройства сообщена с магистралью; распределители остальных устройств остались в исходном положении (f2=f3=f4=0). Точно также второй, третий и четвертый столбцы таблицы выражают условия срабатывания соответствующих устройств.
В рассматриваемом примере использованы все возможные состояния (сочетания) входных сигналов и каждому из них соответствует команда на ход вперед поршня одного из устройств. Состояния входов, при которых выходной сигнал равен единице, являются для данного выхода обязательными или рабочими состояниями. Для выходного сигнала f1 обязательным состоянием будет состояние входов 1 1 (первый столбец табл. 10.1, соответствующий первому состоянию); для f2= 0 1 (второе состояние), для f3 = 1 0 (третье состояние) и для f4 = 0 0 (четвертое состояние).
Состояния, которые соответствуют нулевому значению выходного сигнала, будут для данного выхода запрещенными состояниями. Например, для выхода f1 запрещенными являются состояния второе, третье и четвертое (см. № состояний в табл. 10.1); для выхода f2 - состояния первое, третье и четвертое и т. д.
Имея таблицу состояний, достаточно просто перейти от нее к структурной схеме, выражающей соотношения между входами и выходами отдельных входящих в нее элементов. Поскольку f1 = 1 при х1 = 1 и х2 = 1 выходы переключателей х1 и х2 следует объединить через оператор и, а выход последнего сообщить с полостью управления распределителя 1 первого устройства (см. рис. 10.2). Нетрудно заметить, что равенство $\ = 1 не будет выполняться при всех остальных комбинациях входных сигналов, так как один или оба входа элемента и оказываются сообщенными с атмосферой.
Для получения сигнала Г2 = 1, подаваемого в полость управления распределителя второго исполнительного устройства, необходимо получить давление на выходе оператора и при закрытом переключателе XI и открытом переключателе х2.
Чтобы иметь давление на одном из входов и при закрытом переключателе хь выход которого в этом случае сообщается с атмосферой, следует между оператором и и переключателем X] установить оператор не (инвертор). На выходе элемента не давление появляется в случае отсутствия давления на его входе (т. е. при закрытом переключателе х^.
Аналогично могут быть получены выходные сигналы Г3 и Г4. В первом случае на один вход оператора и подается сигнал непосредственно с выхода переключателя хь а на другой вход - - с выхода переключателя х2 через инвертор; во втором случае на оба входа элемента и сигналы поступают с инверторов.
Во многих случаях целесообразно наряду с таблицей состояний пользоваться буквенными выражениями условий работы пневматической системы, отражающими ее структуру. Буквенные выражения записываются на основании соотношений алгебры логики и для рассматриваемого примера имеют вид:
![]()
Первая зависимость отражает условие получения сигнала ^ -открыты переключатели XI и х2, а вторая - - условие получения сигнала Г2 - закрыт переключатель XI и открыт переключатель х2 и т. д.
89
Рассматриваемая пневматическая система характерна тем, что при ее работе встречаются все возможные сочетания сигналов на входе: 11,01,10, 00. Посмотрим, насколько система может быть упрощена, если автомат будет использоваться для сортировки только бракованных деталей, т. е. состояние 00 при его работе не будет встречаться. Такое состояние называется неиспользуемым. В табл. 10.2 представлены состояния входов и выходов автомата для этого случая.

Если в предыдущем примере (см. табл. 10.1) каждое из значений XI = 0 и х2 = 0 встречалось в двух состояниях системы (при измерении изделия с браком по одному из размеров и при измерении годного изделия), то сейчас каждое из них осталось только в одном состоянии системы, так как годные детали не подаются на позицию контроля. Следовательно, для подачи сигнала Г2 = 0 и {3 = 0 достаточно одного признака (X] = 0 или х2 = 0). Теперь выражения (10.1) могут быть записаны в более простом виде (сигнал Г4 вообще отсутствует):
![]()
Имея в виду последние соотношения, при построении структурной схемы согласно табл. 10.2 необходимо установить на три
90
элемента и меньше по сравнению со схемой, представленной на рис. 10.2, сигналы {2 и ^з подаются в полости управления распределителей сразу с выходов соответствующих инверторов.
Упрощение структуры схемы, т. е. переход от выражения (10.1) к (10.2) может быть выполнен формально на основании законов алгебры логики. Так как команда на ход вперед поршня ИУ-2 должна обязательно подаваться при комбинации сигналов на входе 0 1, но может также быть подана при комбинации О О (эта комбинация все равно не встречается при работе системы), то выражение для ^2 записывается в виде:

Аналогично для функции ^3 имеем:
Словесной формулировкой последней записи будет: «сигнал ?2 подается при закрытом переключателе ^ и при открытом переключателе х2 или при закрытых обоих переключателях X] и х2. Далее после алгебраического преобразования на основании законов алгебры логики, получим


Таким образом, благодаря применению методов алгебры логики, переход от выражений вида (10.1) к выражениям более простого вида (10.3) и (10.4) осуществляется путем несложных преобразований, без какого-либо анализа системы. При этом должно быть известно, какие состояния системы являются обязательными и какие неиспользуемыми.
Результат получился бы также совпадающим с выражениями (10.3) и (10.4), если четвертое состояние в табл. 10.1 оказалось бы безразличным. Безразличным состоянием для данного выходного
91
сигнала называют состояние, встречающееся при работе системы, при котором выходной сигнал может подаваться или не подаваться. В обоих случаях работа системы не нарушается.
Например, полость управления двустороннего распределителя после переключения его рабочего органа может оставаться сообщенной с магистралью, а может быть сообщена с атмосферой. И только когда понадобится вернуть рабочий орган распределителя снова в исходное положение, эту полость необходимо обязательно сообщить с атмосферой, одновременно подавая сжатый воздух во вторую полость распределителя. Таким образом, до этого момента сигнал в полость управления распределителя может подаваться или не подаваться, не нарушая работы системы.
Неиспользуемые и безразличные состояния объединяются общим понятием -условные состояния. Условность их состоит в том, что по желанию конструктора неиспользуемые и безразличные состояния при упрощении структуры системы могут быть отнесены как к обязательным, так и к запрещенным состояниям.
В качестве второго примера рассмотрим структурный синтез пневматической системы, состоящей из шести исполнительных устройств, управляемых тремя переключателями с механическим приводом. Поршень одного из устройств должен переместиться вперед, если переключатели хь х2, х3 занимают положения, указанные в табл. 10.3.
92
Таблица
10.3

Для неиспользуемого состояния 011 такими соседними состояниями будут 010 (условие получения сигнала Г3) и О О 1 (условие получения сигнала Г5)- Переходя к буквенной записи, имеем

В каждом из приведенных выше выражении первое слагаемое есть буквенная форма записи обязательного состояния входов системы при данном выходном сигнале, второе слагаемое - - форма записи неиспользуемого состояния 011.
Точно так же для неиспользуемого состояния 111 соседними состояниями из заданных будут 110 (условие получения сигнала
93
Г4) и 1 О 1 (условие получения сигнала Г6). В соответствии с этим получим:

Выражения для сигналов ^ и {2 упростить нельзя, так как неиспользуемые состояния 011и111не являются соседними к состояниям 0 0 0 и 1 О О, обязательным для ^ и Г2; они различаются значениями двух входных сигналов вместо одного. Поэтому окончательно можно записать следующие зависимости в буквенном виде, характеризующие структуру системы:

Структурная схема здесь не приводится, поскольку она аналогична схеме, показанной на рис. 10.2, и отличается от последней только количеством входных и выходных сигналов, а также логических элементов и. Для получения сигнала ^ надо иметь два двуходовых оператора и, внешние входы которых следует сообщить с переключателями хьх2 и х3 через инверторы; точно также два элемента и необходимы для получения сигнала Г2 той лишь разницей, что на один из входов и сигнал от переключателя XI поступает, минуя инвертор, непосредственно с выхода переключателя X] И Т. Д.
При дальнейшем изложении материала рассматриваются более сложные задачи синтеза с большим количеством обязательных, запрещенных и условных состояний. В этих случаях процесс упрощения логических функций, характеризующих выходные сигналы системы, сопровождается многократными преобразованиями вида (10.3) или (10.4) Поэтому для уменьшения трудоемкости упрощения логических функций вместо операции с буквенными выражениями используются, как правило, табличные методы.
94
10.3 Синтез систем управления одним исполнительным
устройством.
В качестве примера рассмотрим систему управления одним исполнительным устройством, поршень которого должен перемещаться вперед при открытии не менее двух из трех переключателей хь х2 и х3 на входе системы. Обязательные и запрещенные состояния для этого случая, сгруппированные отдельно, представлены в табл. 10.4. Как следует из таблицы, сигнал ^ на выходе системы равен единице при четырех комбинациях сигналов на входе: 1 10, 101,01 1и1 1 1; в остальных случаях он равен нулю. Неиспользованных состояний здесь нет.
Таблица 10.4
|
Номера состояний Сигналы Обязательные Запрещенные 12345678 X, 11010100 Х2 10110010 Х3 01110001 Р, 11110000 |
Особенность этой системы по сравнению с рассмотренными ранее состоит в том, что выходной сигнал принимает единичное значение при нескольких состояниях сигналов на входе. Словесная формулировка условий появления сигнала ^ может быть выражена следующим образом: сигнал 1*1 должен появиться при открытых переключателях XI и х2 и при закрытом переключателе х3 (состояние 1) или при открытых переключателях XI и х3 и при закрытом переключателе х2 (состояние 2) и т.д. Таким образом, чтобы получить сигнал на выходе системы при нескольких комбина-
95
циях входных сигналов необходимо ввести в структуру системы элементы или (см. рис. 10.3, а).
Схема, показанная на рис. 10.3, а, составлена непосредственно по табл. 10.4 без учета возможностей упрощения, которые имеются в данном случае вследствие наличия нескольких обязательных состояний. Упростив структуру системы, основываясь сначала на некоторых рассуждениях, а затем покажем, как это сделать помощи методов алгебры логики.
Сравним первое, второе и третье состояния с четвертым (см. табл. 10.4). Последнее из них соответствует одновременному открытию трех переключателей, а по условию задачи для срабатывания исполнительного устройства достаточно открыть два переключателя в произвольной комбинации. Следовательно, комбинация из трех открытых переключателей является с точки зрения определения условий срабатывания исполнительного устройства излишней. Схема будет работать точно так же, если таблицу состояний (табл. 10.4) заменить следующей (табл. 10.5). Здесь в некоторых случаях значение входного сигнала не указывается (ставится прочерк), так как исполнительное устройство должно сработать независимо от того, равен он 0 или 1.
Таблица 10.5
|
Номера состояний Сигналы Обязательные 1 2 3 X, 11-Х2 1-1 X, - 1 1 Р, 111 |
Переход от табл. 10.4 к табл. 10.5 алгебраическим методом осуществляется путем преобразования буквенных выражений.
96
Выше было отмечено, что для упрощения логической функции необходимо выявить прежде всего соседние состояния из числа обязательных и условных. Так как условных (неиспользуемых и безразличных) состояний в табл. 10.4 нет, то сравним между собой обязательные состояния. Нетрудно заметить, что состояние 4 является соседним по отношению к любому из первых трех. В то же время все три первых состояния различаются между собой значениями двух входных сигналов (например, состояния 1 и 2 не совпадают по значениям х2 и х3), т.е. не являются соседними. Имея это в виду, выражение для Гь составленное по табл. 10.4

где слагаемое Х]Х2х3 повторено трижды, а затем преобразовали его и получили:
запишем в виде
![]()

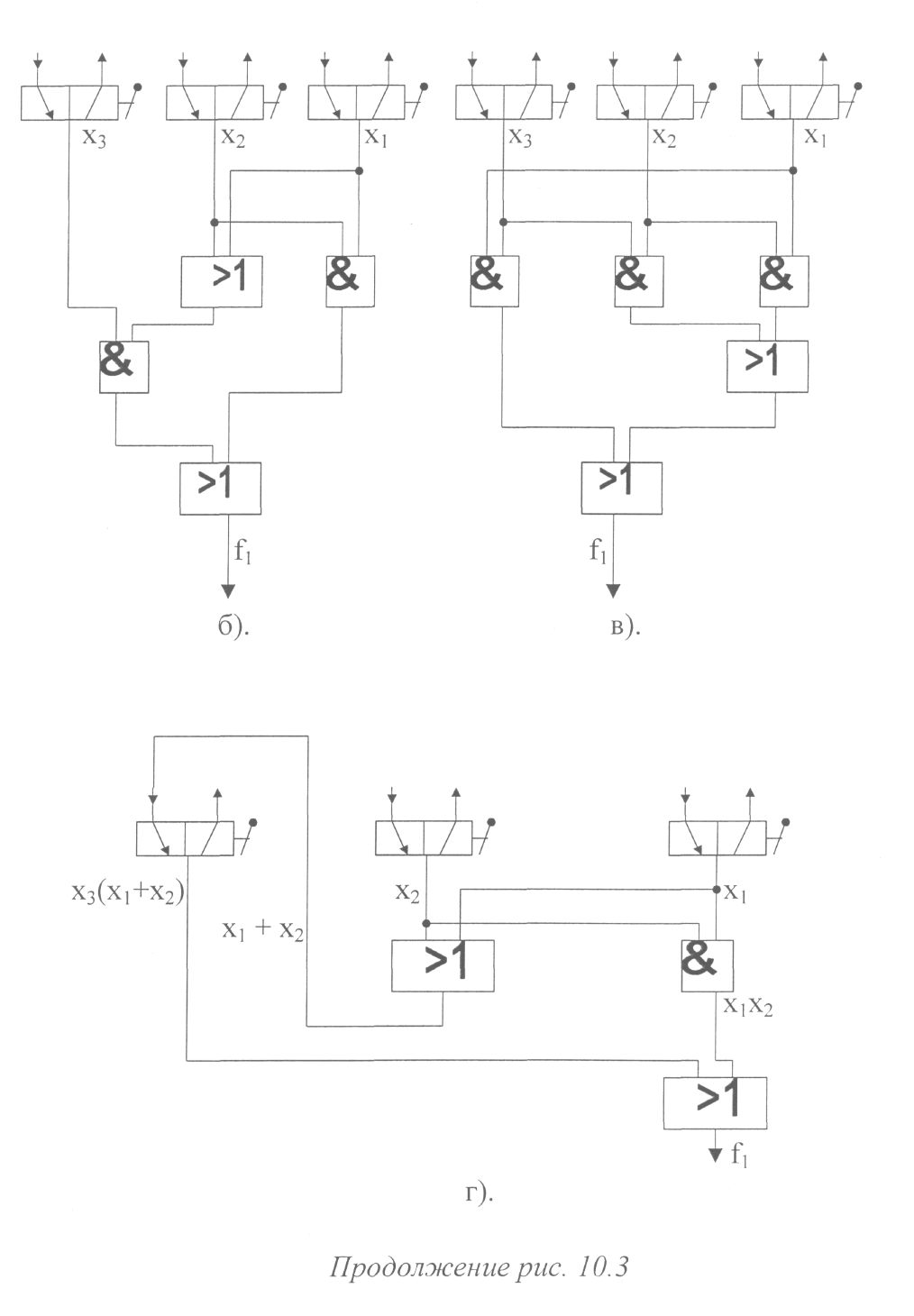
Структурная схема, соответствующая выражению (10.6), показана на рис. 10.3, б.
Выражение (10.6) может быть также записано в виде
и = х1Х2 + х3(х! + х2) (10.7)
где один из множителей х3 вынесен за скобки. Реализуя выражение (10.7) (см. рис. 10.3, в), также получаем систему, соответствующую заданным условиям работы, но содержащую на один оператор меньше по сравнению с предыдущей схемой.
Общее число логических элементов может быть доведено до трех, если после реализации X] + х2 подать этот сигнал на вход пе-
97
реключателя х3, на выходе которого получим х3(х! + х?) (см. рис. 10.3, г).
Система, подобная рассмотренной выше, используется на практике, например, для включения транспортирующего устройства (подъемника) при поступлении на его платформу не менее двух изделий с трех параллельных конвейеров. В этом случае переключатели открываются автоматически самими изделиями.

Рис. 10.3 Система управления одним устройством от трех
переключателей.