

1 − Рукоять переднего хода, 2, 3 − звенья рычажного механизма,
4 − Рукоять заднего хода, 5 − рычаг блокировки захватов, 6 - захваты,
7 − Канат, 8, 9 − блоки захватов, 10 − тяга рычажного механизма,
11 – корпус
5.4. Подъемники.
|
Подъемники - группа грузоподъемных машин, предназначенных для подъема людей и материалов на определенную высоту в грузонесущих органах различного исполнения, перемещаемых подъемным механизмом |
В зависимости от категории поднимаемых грузов различают грузовые, пассажирские и грузопассажирские подъемники. Для подъема людей и штучных грузов используют кабины, клети, рабочие площадки (платформы), а для подъема сыпучих и пластичных материалов - ковши.
Механизм подъема:
• лебедки, перемещающие грузонесущие органы в жестких направляющих несущих конструкций (мачт, шахт) или вдоль подвешенных гибких канатов,
• шарнирно-рычажные (ножничные),
• стреловые: телескопические и шарнирно-сочлененные с гидроприводом.
В комплект грузоподъемного оборудования подъемников входят: несущая конструкция, подъемный механизм, грузонесущий орган (рабочая платформа - в грузовых подъемниках, кабина - в пассажирских), предохранительная и управляющая аппаратура.
В строительстве нашли применение подъемники:
• традиционного исполнения, обеспечивающие осевое перемещение грузонесущего органа:
- с жесткой несущей конструкцией (рис. 5.14) в виде шахт – шахтные, мачт – мачтовые, с жесткими направляющими грузонесущего органа. Удобство использования мачтовых подъемников удлиненными платформами (мачтовых платформ) в технологиях отделочных работ по фасаду зданий привело к созданию их двухмачтовых конструкций.

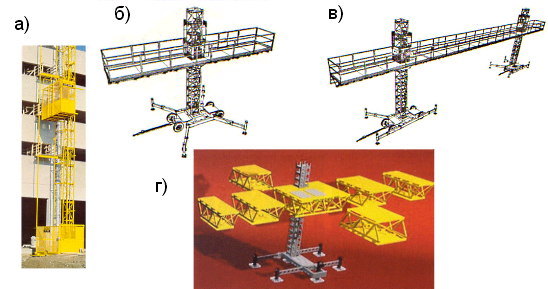
Рис. 5.14. Подъемники с жесткой несущей конструкцией мачт:
а), б) одномачтовые; в) двухмачтовые; г) модульное строение
мачтовых платформ
- без жесткой несущей конструкции (свободного подвеса) с гибкими направляющими в виде канатов, используемые при отделке фасадов – фасадные (рис. 5.15);

Рис. 5.15. Подвесные рабочие платформы (люльки)
- шарнирно-рычажные, раскладывающиеся мачты – ножничные (рис. 5.16);


Рис. 5.16. Ножничный самоходный подъемник:
а) при поднятой платформе; б) при опущенной платформе
• кранового исполнения:
- стрелового телескопического и шарнирно-сочлененного (рычажно-стрелового), при установке которых на опорно-поворотное устройство обеспечивается пространственное перемещение грузонесущего органа (рис. 5.17).


Рис. 5.17.Подъемники телескопические и шарнирно-рычажные:
а) телескопический; б) Телескопическая вышка; 7) коленно-рычажный
Конструкция грузоподъемного механизма может быть выполнена в одном из трех исполнений (рис. 5.18):
- грузоподъемной реверсивной лебедки с тяговым канатом,
- механизма подъема зубчато-реечного типа,
- гидравлического привода с подъемным гидроцилиндром.


Рис. 5.18. Подъемные механизмы:
а), б) канатного подъема; в) зубчато-реечный; г, д) гидравлические;
1 – металлоконструкция с направляющими; 2 – грузонесущий орган;
3 – барабан лебедки; 4 – зубчато-реечная передача редукторного привода;
5 – гидроцилиндры
|
Грузонесущими органами грузовых и грузопассажирских подъемников являются площадки, клетки, кабины, скорость перемещения которых составляет 0,3+0,65 м/с у мачтовых и до 2,0 м/с и выше - у шахтных подъемников. |
С целью снижения мощности привода грузоподъемного механизма и улучшения плавности хода в системе подвеса кабины используют противовес. Для предотвращения самопроизвольного падения грузонесущего органа подъемники оборудуют специальными защитными устройствами-ловителями, осуществляющими режим аварийного торможения и остановки падения грузонесущего органа на ограниченном малом пути (до 1,0 м). Кабина пассажирского подъемника-лифта может иметь гибкое канатное или жесткое крепление подвес.
Гидропривод лифтов выполняют по открытой схеме. В качестве привода насоса используют асинхронные электродвигатели общего применения, а в ряде случаев при их расположении в баке с гидрожидкостью - специального. Электропривод управляемый. С целью снижения повышенных значений пусковых токов применяют фазное или частотное регулирование. Основные логические функции управления выполняет станция управления - главный контролер.
Рассмотрим устройство лифта с гидроцилиндром подъема. Движение от штока гидроцилиндра в нем передается кабине (или грузовой площадке) непосредственно или через канатный мультипликатор. Применение последнего позволяет повысить высоту подъема кабины в случаях применения гидроцилиндров с ограниченным ходом штока, меньшего требуемой высоты подъема. Используются гидроцилиндры поршневые, плунжерные, включая телескопические, как одностороннего действия, так и двухстороннего. Различают лифты с одним и двумя установленными гидроцилиндрами, которые размещают на уровне пола или в шахтовых приемках.
Движение кабины лифта происходит вдоль жестких направляющих, закрепляемых в лифтовой шахте. С целью безопасности кабина и окна шахты оснащают дверями, система управления которых составляет часть общей системы управления лифтом. Пульты управления расположены в кабине лифта и вынесены на поэтажные площадки для вызова кабины. Для управления лифтом предусмотрена гидростанция. Простейшая схема системы управления гидравлическим лифтом с гидроцилиндром одностороннего действия представлена на рис. 5.19.

Рис. 5.19. Гидравлический лифт (схема гидропривода)
В состав гидроаппаратуры управления входят:
• электромагнитный клапан спуска VMD, обеспечивающий слив рабочей жидкости из поршневой полости силового гидроцилиндра в резервуар S;
• клапан ручного управления спуском VM - с той же функцией;
• обратные клапаны VNR и VC, осуществляющие возможность подачи жидкости в поршневую полость силового гидроцилиндра при включенном насосе, но препятствующие ее вытеканию из нее при отключенном;
• дроссель D - устройство, регулирующее расход жидкости и обеспечивающее в данной схеме возможность ее слива в резервуар из силового гидроцилиндра;
• предохранительный клапан VS, осуществляющий слив жидкости в резервуар при включенном насосе в случае превышения давления в напорной магистрали гидроцепи по тем или иным причинам.
В гидравлической схеме предусмотрены два фильтра: во всасывающей и напорной магистралях, два запорных вентиля и манометр. По трассе движения кабины, на этажах здания установлены выключатели электродвигателя насоса, расположенного в гидростанции управления.
Насос гидравлической цепи приводится в действие асинхронным электродвигателем при замыкании электрической цепи питания контактора подъема, в случае нажатия оператором на кнопку пульта управления. В этом случае жидкость из резервуара нагнетается насосом через напорную магистраль в поршневую полость силового гидроцилиндра. Происходит процесс подъема кабины. При подходе к месту остановки выключатель, установленный на этаже, отключает цепь питания электродвигателя. Это приводит к падению давления в напорной магистрали, на что реагируют обратные клапаны VNR и VC, предотвращая подачу жидкости в силовой гидроцилиндр. Процесс подъема закончен. Автоматикой системы управления предусмотрено открытие дверей кабины и шахты для выхода пассажиров с последующим их закрытием.
При получении приказа от оператора на спуск кабины на станции управления включается контактор спуска. При этом электродвигатель отключен, а в цепи управления лифта включается на слив клапан спуска VMD. Вытекание жидкости из поршневой полости силового цилиндра через дроссель и сливное отверстие клапана VMD происходит за счет силы тяжести кабины и груза. Ограничение проходного отверстия дросселя создает подпор и препятствует быстрому перемещению поршня силового гидроцилиндра вниз. На случай выхода из строя систем автоматики предусмотрен клапан ручного управления спуском VM.
|
Автоподъемники - группа грузопассажирских подъемников, выполненных преимущественно на базе пневмоколесных СШ. |
Металлоконструкции их рабочего оборудования представляют телескопические или шарнирно-сочлененные стрелы или мачты, на конце которых расположена рабочая платформа (пассажирский вариант) или вилы для штучных грузов (грузовой вариант). Привод рабочего оборудования гидрообъемный, с пропорциональным управлением, обеспечивающий точную наводку грузонесущего органа на место установки. В конструкциях рабочего оборудования применены ориентирующие механизмы, обеспечивающие параллельное земле перемещение рабочей платформы при "раскладывании" шарнирно-сочлененных стрел. Подъемники с указанными видами рабочего оборудования, более характерного для кранов, погрузчиков и экскаваторов, широко используются при проведении работ. Номинальная грузоподъемность автоподъемников составляет до 500+800 кг, а максимальная высота подъема для телескопических стрел - около 20 м.
5.5. Строительные краны.
|
Краны представляют широкую и наиболее сложную группу грузоподъемных машин. Они перемещают грузы в пространстве с помощью механизмов: грузоподъемного, изменения вылета крюка, вращения и передвижения, составляющих их привод (рис. 5.20). |



Рис. 5.20. Крановые механизмы:
а - грузовая лебедка, б - групповые лебедки главного и вспомогательного подъема,
в, г, д, е - кинематические схемы: грузовых лебедок (в, г), механизмов
передвижения (д) (рельсоколесного) и поворота (е) (вращения);
1 - электродвигатель, 2 - муфта, 3 - тормоз, 4 - редуктор, 5 - дифференциал,
6 - барабан, 7 - канатоукладчик
С целью обеспечения высокой точности монтажа и производительности в них используется регулируемый электромеханический и гидрообъемный привод с пропорциональным управлением с использованием микропроцессоров, обеспечивающий регулирование в широких пределах. Регулирование в более узком диапазоне скоростей реализуется электроприводом общего и кранового исполнения, выполненным на базе асинхронных электродвигателей с механическими двух- и трехскоростными редукторами и гидродинамическими передачами.
Краны оснащены системой безопасности, обеспечивающей:
- грузовую устойчивость от опрокидывания путем контроля грузовых характеристик и состояния опорного контура по реальным значениям нагрузок;
- прочность и устойчивость потери формы отдельных элементов при возможных перегрузках, путем контроля внутренних силовых факторов;
- безопасный режим работы в стесненных условиях и условиях близости линий электропередач (ЛЭП) с помощью системы координационной защиты, исключающей работу механизмов вблизи посторонних препятствий (рис. 5.21).


Рис. 5.21. Система координационной защиты башенного крана:
а, б – схема расположения башенного крана на строительной площадке;
1 – препятствия (здания, сооружения и другие), расположенные в зоне воз-
можного действия башенного крана, 2 – строящееся здание, 3 – рельсовый
путь крана, А, Б – ограничения зоны действия башенного крана, соответственно, по
повороту стрелы и вылету крюка, в – структурно-функциональная
схема системы координационной защиты Д - датчики (ВГ – вылета грузовой
каретки, ВП – высоты подъема крюка, ПС – положения стрелы по
углу поворота, ПК – положение крана на рельсовом пути); БУ – блок управления,
БПИР – блок питания и исполнительное реле, У – усилитель-согласователь
сигнала, А/D – преобразователь аналового сигнала, РУ – решающее
устройство, Р – реле, БПСП – блок параметров строительной площадки
|
Краны разделяют на две группы в зависимости от условий крепления к опорам несущей металлоконструкции: консольные (стреловые) и пролетные. Группа стреловых кранов наиболее представительна, в нее входят башенные краны, стреловые самоходные краны, мачтово-стреловые краны, ряд специальных кранов. |