

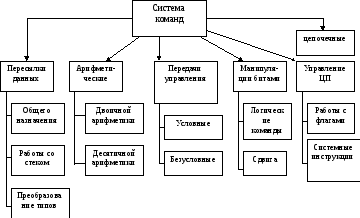
9. Система команд
Машинная команда представляет собой инструкцию процессору, в которой указано: что делать; объекты, над которыми выполняется действие (операнды); как делать (зависит от типа операнда). Также могут присутствовать один или несколько префиксов, указывающих на особенности выполнения команды.
В этой главе мы рассмотрим только команды ЦП, исключив из рассмотрения команды сопроцессора, таким образом, исключив всевозможные расширения: MMX, 3DNow!, SSE, SSE2 и т.д.
9.1. Классификация команд по операндам
Команды имеют переменный формат, каждая команда имеет свою структуру. Команды могут быть:
безадресные — операнд задан неявно на микропрограммном уровне;
одноадресные — операнд рассматривается как источник или получатель;
двухадресные — в двухадресных командах первый операнд является приемником, второй — источником. Содержимое приемника изменяется в зависимости от типа команды. В двухадресной команде операнды имеют одинаковый размер. Возможные сочетания операндов в двухадресных командах:
регистр регистр;
регистр память;
память регистр;
непосредственный операнд регистр;
непосредственный операнд память.
Операнд может располагаться:
в самой команде (непосредственный операнд), например: MOV AX, 0C24, здесь 0C24 — непосредственный операнд;
в одном из регистров процессора или сопроцессора;
в сегменте данных;
в порту ввода/вывода. Номер порта может быть задан и непосредственным операндом (если он <100), и может находиться в регистре DX;
в сегменте стека.
9.2. Классификация команд по действию
9.2.1. Команды пересылки данных
 Команды
этой группы пересылают данные из одного
места компьютера в другое: между
регистрами и памятью. Ниже перечислены
основные команды этой группы.
Команды
этой группы пересылают данные из одного
места компьютера в другое: между
регистрами и памятью. Ниже перечислены
основные команды этой группы.
Команда MOV осуществляет пересылку (регистр-регистр или регистр-память) данных между регистрами общего назначения и ячейками памяти.
В процессорах 80686 и выше введены команды условной пересылки CMOVcc. Эти команды производят передачу данных только в случае установленного условия (cc), которое задается различными значениями признаков, установленных в регистре флагов. В этом же процессоре появились команды условной установки бит: SETcc — при выполнении заданного условия значение операнда устанавливается равным 1, в противном случае — 0.
BSWAP производит обмен байтов внутри регистра.
PUSH копирует операнд в вершину стека и сдвигает указатель стека вниз.
РОР берет верхний элемент из стека, помещает в операнд и сдвигает указатель стека вверх. Используются в паре с предыдущей командой.
PUSHA, PUSHAD, РОРА, POPAD выполняют запись в стек и извлечение из него восьми регистров общего назначения. При этом последовательно заполняются или освобождаются восемь 16- или 32-разрядных ячеек стека. При этом PUSHA, РОРА оперируют с 16-разрядными регистрами, а PUSHAD POPAD с 32-разрядными.
IN/OUT производят пересылку данных между аккумулятором ЕАХ (АХ, AL) и адресуемым портом. Адрес порта может задаваться непосредственно операндом или содержимым регистра DX.
Команда MOVSX пересылает данные из меньшего (по числу бит) операнда в больший с расширением знакового разряда.
Команда MOVZX — аналогично, без расширения знакового разряда.
XCHG предназначена для обмена содержимым двух регистров или регистра и ячейки памяти.
В литературе часто упоминается, что команда XCHG обязательно захватывает системную шину на время своего выполнения, но редко объясняется, что это означает и почему это важно.
Рассмотрим двухпроцессорную систему. Допустим, в ячейке A находится число 4, в регистре AX первого процессора число 5 и в регистре AX второго процессора число 2. Оба процессора почти одновременно начали выполнять команду XCHG AX, A. Ее выполнение, с точки зрения шины, состоит из двух операций: чтения из ячейки А и записи в ячейку. Если шина не монополизируется, последовательность операций может быть такой:
|
Операция на шине |
После выполнения операции | ||||
|
T1 |
T2 |
AX1 |
AX2 |
A | |
|
|
x |
x |
5 |
2 |
4 |
|
T1 ← A |
4 |
x |
5 |
2 |
4 |
|
T2 ← A |
4 |
4 |
5 |
2 |
4 |
|
A ← AX1 |
4 |
4 |
5 |
2 |
5 |
|
A ← AX2 |
4 |
4 |
5 |
2 |
2 |
|
AX1 ← T1 |
4 |
4 |
4 |
2 |
2 |
|
AX2 ← T2 |
4 |
4 |
4 |
4 |
2 |
Здесь T1, T2 — программно недоступные промежуточные регистры процессоров.
В результате такой последовательности получился слегка неожиданный результат: в регистрах AX обоих процессоров одно и то же значение, в то время как подобное не могло бы произойти, если бы любой из процессоров выполнил свою команду за один раз, не давая другому возможность модифицировать в это время память. Монопольный захват шины исключение доступа к памяти параллельных процессоров. В этом случае последовательность действий была бы такой:
|
Операция на шине |
После выполнения операции | ||||
|
T1 |
T2 |
AX1 |
AX2 |
A | |
|
|
x |
x |
5 |
2 |
4 |
|
T1 ← A |
4 |
x |
5 |
2 |
4 |
|
A ← AX1 |
4 |
x |
5 |
2 |
5 |
|
AX1 ← T1 |
4 |
x |
4 |
2 |
5 |
|
T2 ← A |
4 |
5 |
4 |
2 |
5 |
|
A ← AX2 |
4 |
5 |
4 |
2 |
2 |
|
AX2 ← T2 |
4 |
5 |
4 |
5 |
2 |
Эта особенность команды XCHG особенно важна, например, при организации семафоров в многопроцессорной системе.
Многие другие команды, в которых приемник является одновременно источником, также могут работать с монопольным захватом шины, если перед ними стоит команда-префикс LOCK.