

2. Выбор функциональной схемы
Существует такое понятие как система. Это совокупность, состоящая из отдельных частей, находящихся в определённых связях друг с другом и составляющих целостность и единство. Изучение поведения системы осуществляется с помощью моделей. Люди изучают объекты с целью управления ими для достижения необходимых количественных и качественных характеристик. Для выработки управляющих воздействий необходимо иметь информацию о желаемом и фактическом состоянии объекта. Управление – это процесс во времени, следовательно, система управления является динамической.
Существует следующая классификация систем автоматического управления:
1 .Система разомкнутого управления:
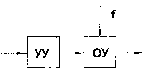
Рис.1
Алгоритм управления вырабатывается только на основе заданного функционирования объекта управления.
При наличии возмущающих воздействий f состояние объекта будет отличаться от заданного. Этот метод применяется тогда, когда возмущения строго определены и учтены при формировании алгоритма управления, вводится изменение в алгоритм управления, которое компенсировало бы возмущающее воздействие.
2.Система по принципу компенсации:
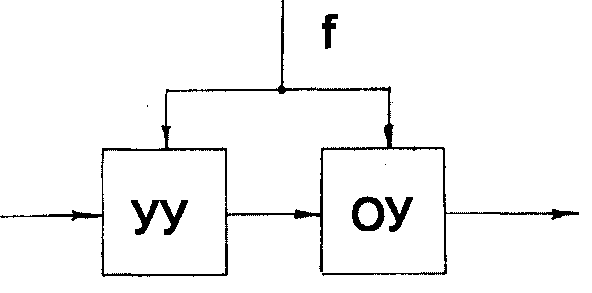
Рис.2
В этом случае вся информация о действующих возмущениях поступает на УУ и учитывается при выработке алгоритма управления. В таких системах иногда не возможно измерить возмущения, а также отсутствует информация о результатах управления.
3.Система по принципу обратной связи:
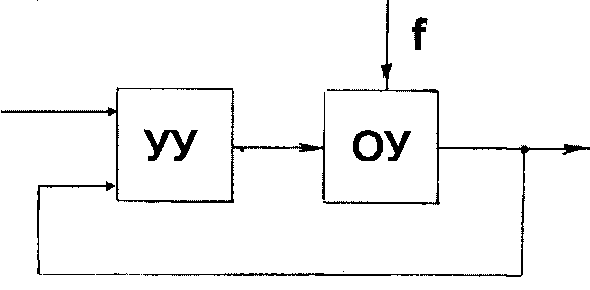
Рис.3
В данной системе существует канал обратной связи. Причем косвенно через ОУ учитываются и временные возмущения f. Достоинства такой системы:
а. Минимальная погрешность управления
б. Система относительно проста
в. Устойчивость
В курсовом проекте необходимо спроектировать электронный блок, который работает в широком температурном диапазоне регулируемой величиной является скорость вращения исполнительного двигателя постоянного тока со следующими параметрами:
Uном=380 В; Iном=91 A
С учетом того, что управление двигателем осуществляется в импульсном режиме, структурная схема будет иметь вид:
g(t) +
Сравн. Устр-во.
Усилитель
ШИМ
Предм. Усил-ль
Усилитель мощности
y(t)
- 






Объект
Двиг.
О С
Датчик


Рис.4
3. Описание работы схемы
Структурная схема
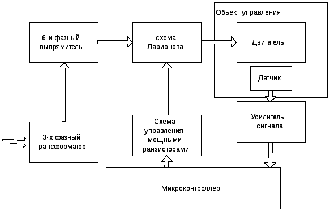
Рис.5
Питание осуществляется от трёхфазной промышленной сети. Соединение обмоток трансформатора выбрано треугольник-звезда ввиду преимущества соединения звездой. На этом этапе 380 вольт промышленной сети преобразуется в необходимые нам 220 вольт переменного тока. Далее подключен шестифазный выпрямитель. Он представляет собой сборку из 6-ти диодов. На этом этапе мы получаем постоянный ток с напряжением 250 вольт. Далее подключается схема Ларионова управления двигателем.
4. Выбор элементов схемы.
Исходя из заданных параметров двигателя, подберём элементы с необходимыми характеристиками.
Параметры двигателя: Uном=380 В; Iном=91 А.
Так как объект управления- двигатель, необходимо взять запас по току для пускового режима. В двигателях постоянного тока пусковой ток может в 10 раз превышать номинальный. В нашем случае расчёт такого пускового режима не представляется возможным ввиду больших токов. Выберем запас по току в разумных пределах:

Также необходим запас по напряжению. При соединении обмоток трансформатора треугольник- звезда и использовании 6-ти фазного выпрямителя (КПД=0.7-0.9), напряжение на выходе выпрямителя находится по формуле:
Учитывая запас по напряжению:


Таким образом необходимая мощность трансформатора:

Выберем трансформатор ET3S_F-315, на схеме Т1, мощностью 168,5 кВт. Его более подробное описание в приложении 1.
Подберём тиристоры для выпрямителя (VD1-VD6). Выберем диодные модули RM1200DB-34S, рассчитанные на ток в 1200 А и напряжение 1700 В. Каждый модуль содержит 2 диода. Для построения 6-ти фазного выпрямителя, необходимы 6 диодов (3 модуля). Более подробные характеристики в приложении 2.
Для реализации частотного управления двигателем, используем о схему Ларионова. Подберём силовые транзисторы (VT1-VT6). Нам подходят IGBT- транзисторы. Они способны выдержать большие токи. Также для управления такими транзисторами необходимо сравнительно маленькое напряжение. Выберем модули CM1200DC-34N, рассчитанные на ток в 1200 А и напряжение 1700 В. Каждый модуль содержит 2 транзистора IGBT и 2 защитных диода. Нам необходимо 6 транзистора (3 модуля). Более подробные характеристики в приложении 3.
Для управления транзисторными модулями подберём драйверы. Специально для данных транзисторов уже существует драйвер 2SB315A. Данный тип драйверов управляется 15 В напряжением. Имеет два канала и крепится к транзисторному модулю. Нам необходимо 6 драйвера. Более подробные характеристики в приложении 4.
Рассмотрим схему защиты от перегрузки. Введём резистор R12, на котором будем замерять падение напряжения. Для измерения, достаточно падение напряжение в 5 В. Рассчитаем номинал сопротивления:

Подберём компаратор (DA1). Выберем LM311N- популярный компаратор напряжения. Имеет два выхода - с открытым коллектором и открытым эмиттером. Микросхема LM311N также выпускается минским объединением "Интеграл" с маркировкой IL311AN.
Микросхема LM311N(P) выпускается в пластиковом корпусе типа DIP-8, однако имеет ряд аналогов в 8-выводных металло-стеклянных корпусах
Примечание: Маркировка индекса микросхем LM311N или LM311P , обозначающих тип корпуса пластиковый DIP-8, отличается у разных производителей.
Компаратор LM311N осуществляет переключение выходного напряжения, когда изменяющийся входной сигнал становится выше или ниже определенного уровня. Компаратор принадлежит к классу формирователей, предназначенных для перехода от аналоговых сигналов к цифровым. Поэтому оконечные каскады компараторов обычно конструируют таким образом, чтобы выходное напряжение соответствовало бы принятым логическим уровням распространенных цифровым микросхем. Универсальный компаратор напряжения LM311N может питаться от разнообразных источников питания как от ±5..±15 В так и от однополярных, например, только от +5В или -30В. В связи с этим применение компаратора LM311N может быть разнообразным.
Компаратор LM311N имеет два выхода: открытый коллектор (вывод 7) и эмиттерный (вывод 1). Из-за приведенных особенностей он может подключаться к любым цифровым микросхемам умеренного быстродействия. Более подробные характеристики в приложении 5.
Для защиты компаратора от перегрузки по напряжению необходимы диоды (VD7, VD8). Выберем защитные диоды R2KN. Они выдерживают напряжение в 140 В и ток в 1 А (на 100мс). Более подробные характеристики в приложении 6.
К не инвертирующему входу компаратора необходимо подвести уровень напряжения для сравнения. Для этого необходим подстроечный резистор R2 и для избежания закороток резисторы R1 и R5. Произведём расчёт сопротивлений. Примем общее сопротивление этих резисторов за 1000 Ом. Чтобы подать на вход 2-4.5 В необходимо падение напряжения между движком резистора R2 и землёй 0.5-3 В. Произведём расчёт:


Таким образом, R1=400 Ом, R2= 500 Ом, R5=100 Ом.
К компаратору подберём инвертор(DA2). Выберем MC14584B. Микросхема содержит 6 инверторов. Достоинство схемы- большой диапазон питающего напряжения, двойная диодная защита на каждом входе. Более подробные характеристики в приложении 7.
Для реализации гальванической развязки, используем диод- транзисторную оптопару (D). Выберем PC123. Более подробные характеристики в приложении 8. Ток от инвертора приемлемый 8.8 mA(Мах)< 50 mA(Мах) А напряжение- не соответствует: 1.6 В (Max)< 5 В (Логика). Введём резистор R6. Необходимое падение напряжения: 3.5 В.
Выберем элементы для информационного каскада. Так как работа нашей системы зависит от температуры, нам необходим температурный датчик-терморезистор. Используем термистор на основе монокристалла алмазаТРА-1. К достоинствам таких термисторов можно отнести их стабильные характеристики, даже при длительном воздействии предельных температур, большой рассеиваемой мощностью, широким диапазоном рабочих температур, высоким быстродействием и устойчивостью к внешним воздействиям.
У ТРА-1 диапазон рабочих температур от -200 С0до +330 С0, и сохраняет стабильность до 1000 С0. Более подробные характеристики в приложении 9.
Зная номинальное сопротивление термистора (R4) и диапазон регулируемых температур, выберем сопротивленияR3,R7,R8,R9. При номинальном сопротивлении ТРА-1 в 1000 Ом сопротивлениеR3,R8,R9 также выберем равными 1000 Ом. Сопротивление регулировочного резистораR7 будет зависеть от диапазона регулируемых температур. У термистора ТРА-1 предельное допускаемое отклонение от номинального сопротивления ±20%. Исходя из этого, найдём диапазон изменения сопротивления:

Для усиления сигнала, используем операционные усилители. В качестве DA3,DA4,DA5 выберемOP07CP. Этонедорогой прецизионный операционный усилитель с низкими шумами, высоким входным сопротивлением и большим коэффициентом ослабления синфазного сигнала. ОУ OP07CP выполнен на биполярных транзисторах и рекомендуется для построения малошумящих схем при усилении слабых сигналов. Также важным достоинством является широкий диапазон напряжения питания. Более подробные характеристики в приложении 10.
Для реализации усиления, подберём резисторы обратной связи и др.
Таким образом для коэффициента усиления 10 на каждом ОУ, номиналы сопротивлений на резисторах R10,R11,R14,R16,R17 равны по 1000 Ом, а сопротивления резисторовR13,R15,R18,R19 равны по 10 000 Ом.
Теперь выберем микроконтроллер. Необходимо, чтобы он имел 2 входа (1 аналоговый и 1 цифровой) и 4 цифровых выхода. Выберем PIC12F675. Он содержит 10-ти разрядный модуль АЦП, компаратор, внутренний генератор и др. Микроконтроллер имеет 8 выводов, 2 из которых для питания, а 6- программируемые порты ввода- вывода. Он подходит наилучшим образом так как содержит все необходимые элементы и не остаётся незадействованных портов. Более подробные характеристики в приложении 11.
Для согласования 5 В на выходе микроконтроллера и необходимых для драйвера 15 В, исходя из того, что сигнал цифровой, выберем транзисторы (VT5-VT8) рассчитанные на необходимые режимы работы. 2SC945 это маломощные P-N-P транзисторы с большим коэффициентом усиления ("супербетта") в корпусе TO-92. Применяются в самых широких областях электроники. Они выдерживают напряжение в 50 В что является достоинством- большим запасом по напряжению. Более подробные характеристики в приложении 12.
Подберём резисторы R20-R23. Примем их сопротивление равным 10 000 Ом для избегания перегрузки микроконтроллера и защиты от появления ложного сигнала срабатывания на соседних выводах.
R24 необходим для избегания перегрузки микроконтроллера по току. Примем номинальное значение тока на этом входе 20 мА.
Для реализации возможности включения или выключения схемы, будем подавать с помощью S1 ложный уровень единицы. Создаётся эффект перегрузки по току и микроконтроллер отключает двигатель.
Чтобы защитить схему от перегрузок, включим в сеть плавкие предохранители F1,F2,F3 (Приложение13). Также включим в цепь автоматАВ2М15(Приложение 14).
Для индикации перегрузки по току включим в цепь между R6 иD1 оптопаруD2, светодиодVD21 (красныйFYL-10003HDПриложение 15), резисторR25.R6=R25
Для индикации направления вращения, включим светодиоды в цепи каналов модуляции. В каналы с длительными импульсами. Как показано на Рис.6. VD22,VD23 (зелёныйFYL-10003GDПриложение 16). РезисторыR26, R27.
Все необходимые элементы рассчитаны и подобраны.