

Конспект ТЭС 1 сем
.pdf93
v = fд n = fд log2 |
(umax −umin |
+1) , бит/с. |
|
∆ |
|
Скорость цифрового потока определяет ширину спектра цифрового сигнала:
∆f = v , Гц.
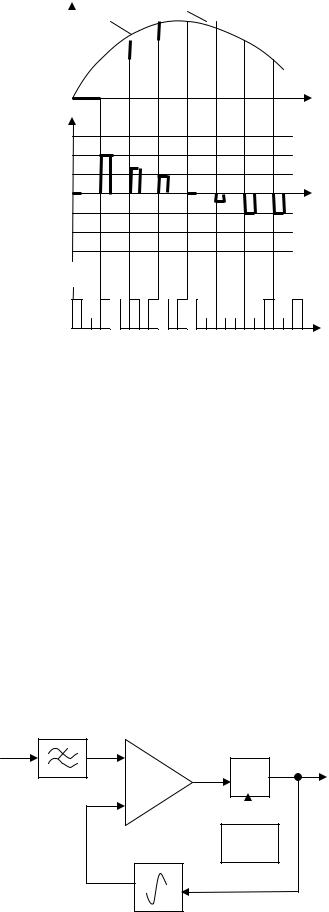
23.3 Кодер АЦП ИКМ взвешивающего типа
Кодирование КАИМ сигнала при ИКМ может осуществляться различными методами. Наибольшее распространение получил метод поразрядного взвешивания, аналогичный процессу взвешивания тяжести при помощи набора разновесков на чашечных весах.
Кодер взвешивающего типа производит операции квантования и кодирования. При квантовании используется усечение, т.е. «округление» в сторону меньшего значения. В этом случае шум квантования лежит в диапазоне 0…Δ, его среднее значение равно Δ/2, а дисперсия составляет 2/2, как и в случае округления.
Ic |
|
Iэт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ГЭТ |
|
||||||
К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1 |
|
|
К2 |
|
|
К3 |
|
|
К4 |
|
|
К5 |
|
|
К6 |
|
|
К7 |
|
|
К8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Е |
|
|
|
|
R1 |
|
|
R2 |
|
|
R3 |
|
|
R4 |
|
|
R5 |
|
|
R6 |
|
|
R7 |
|
|
|
R8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
128Δ |
|
|
64Δ |
|
|
32Δ |
|
|
16Δ |
|
|
8Δ |
|
|
4Δ |
|
|
2Δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПК
SИКМ(t)
ЛУ
Рисунок 23.3 – Функциональная схема кодера взвешивающего типа. Компаратор К сравнивает амплитуды импульсов токов кодируемого и эталон-
ного сигналов: если Ic ≥ Iэт , то на выходе компаратора формируется «0»;
если Ic < Iэт - «1».
94
Логическое устройство ЛУ служит для управления работой ключей К1, …,
К8.
Преобразователь кода ПК преобразует параллельный код в последовательный. Генератор эталонных токов ГЭТ служит для формирования эталонных токов,
которые могут принимать значения от 0 до 255Δ.
Перед началом работы на выходах ЛУ «0». В первый такт кодирования на первом выходе ЛУ формируется «1». Замыкается ключ К1. ГЭТ формирует ток 128Δ. Компаратор производит сравнение токов на его входах. Результат сравнения сохраняет («0» на выходе К) или отменяет («1» на выходе К) «1» на первом выходе ЛУ. Во втором такте кодирования на втором выходе ЛУ формируется «1», замыкая ключ К2. ГЭТ формирует ток (128+64)Δ при «0» на выходе К в предшествующем такте, или 64Δ при «1» на выходе К в предшествующем такте. Далее производится операция сравнения и процесс повторяется. Кодирование завершается за восемь тактов. На каждом такте ПК считывает кодовую комбинацию, сформированную на выходах ЛУ, и осуществляет выдачу ее разрядов на выход кодера.
24 КОДИРОВАНИЕ СИГНАЛОВ С ПРЕДСКАЗАНИЕМ
24.1 Кодирование с предсказанием
Для реального сигнала (телефонного, телевизионного) более вероятны низкочастотные составляющие спектра. Кроме того, частоту дискретизации на практике выбирают выше, чем по Котельникову. Это означает, что значения соседних отсчетов непрерывного сигнала с большой вероятностью мало отличаются друг от друга. Передача кодированных значений отсчетов непрерывного сигнала (ИКМ) является неэффективной, т.к. канал будет загружен наряду с полезной также и избыточной (известной на приеме) информацией. Устранение этой избыточности создает условия для передачи большего количества информации.
Повысить эффективность систем передачи информации позволяет передача кодированных значений отсчетов сигнала ошибки предсказания (кодирование с предсказанием). Сигнал ошибки предсказания представляет собой разность между истинным и предсказанным сигналами. Предсказанный сигнал формируется из предыдущих отсчетов сигнала.
95
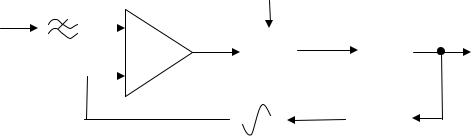
24.2 ДИКМ
Дифференциальная импульсно-кодовая модуляция (ДИКМ) - импульснокодовое представление значений отсчетов сигнала ошибки предсказания. Другими словами отсчеты сигнала ошибки предсказания подвергают обычным операциям квантования и кодирования.
Известно большое число вариантов технической реализации кодирования с предсказанием, которые отличаются операцией формирования сигнала ошибки предсказания. Наиболее широкое распространение получила схема модулятора с обратной связью. В этой схеме кодируются значения разности между данным отсчетом и квантованным предыдущим отсчетом.
|
ФНЧ |
|
|
fд |
|
|
|||||
u(t) |
|
u'(t) |
Δs(t) |
|
|
ΔsАИМ (t) |
|
|
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
Кодер |
sДИКМ (t) |
||||
|
|
|
|
|
|
|
|||||
|
|
û(t) ДУ |
|
|
Дскр |
|
|
ИКМ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Инт |
|
|
||||
|
|
|
|
|
|
|
ΔsКАИМ (t) |
|
Декодер |
|
|
|
|
|
|
|
|
|
|
|
|
ИКМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 24.1 – Структурная схема модулятора ДИКМ.
Фильтр нижних частот (ФНЧ) ограничивает спектр частот входного сигнала u(t) частотой Fmax . Дифференциальный усилитель (ДУ) усиливает разность двух сигналов, поступающих на его неинвертирующий 1 и инвертирующий 2 входы: исходного u′(t) и предсказания u~(t) . Дискретизатор (Дскр) осуществляет дискретизацию разностного сигнала ∆s(t) = u′(t) −u~(t) (сигнала ошибки предсказания). С Дскр дискретизированный разностный сигнал ∆sАИМ (t) поступает на кодер ИКМ, который осуществляет квантование и кодирование отсчетов разностного сигнала. По цепи обратной связи цифровой ДИКМ сигнал sДИКМ (t) поступает в декодер ИКМ, где кодовые комбинации преобразуются в квантованный дискретизированный разностный сигнал ∆sКАИМ (t) . Интегратор преобразует квантованные отсчеты разностного сигнала в ступенчатый сигнал u~(t) (сигнал предсказания).
|
|
|
96 |
|
|
|
u(t) |
|
u'(t) |
|
û(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ΔsАИМ(t) 0 |
t |
0
t
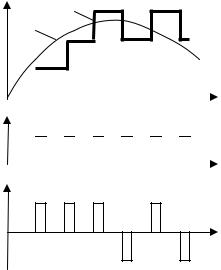
sДИКМ(t) 
0
Рисунок 24.2 – Принцип формирования ДИКМ сигнала.
Шум квантования при ДИКМ меньше, чем при ИКМ при том же числе уровней квантования. Качество передачи при ДИКМ такое жеt , как и при ИКМ при меньшем числе символов в кодовой комбинации (на один-два и белее символов). Шум ложных импульсов при ДИКМ в большей мере, чем при ИКМ, ухудшает верность приема.
24.3 Дельта-модуляция
Дельта-модуляция (ДМ) – представление значений отсчетов сигнала ошибки предсказания с помощью двухуровнего (+1 или -1) одноразрядного кода при большой частоте дискретизации. Сигнал на выходе дельта-модулятора содержит лишь сведения о полярности (знаке) сигнала ошибки предсказания.
u(t) ФНЧ u’(t) |
|
|
1 |
s(t) ПУ |
sДМ(t) |
û(t) |
ДУ |
|
2
Инт
sГТЧ(t)
ГТЧ
Рисунок 24.3 – Структурная схема модулятора ДМ.
97
ФНЧ ограничивает спектр частот входного сигнала u(t) . ДУ усиливает разность двух сигналов ∆s(t) = u′(t) −u~(t) . Генератор тактовой частоты (ГТЧ) вырабатывает тактовые импульсы sГТЧ (t) , которые поступают на пороговое устройство (ПУ). ПУ формирует ДМ сигнал sДМ (t) : на его выходе возникают импульсы положительной полярности, если на выходе ДУ в момент прихода тактового импульса разностный сигнал положительный ∆s(t) ≥ 0 , и импульсы отрицательной полярности, если он отрицательный ∆s(t) < 0 . В це пь обратной связи включается Инт, на выходе которого формируется аппроксимирующий ступенчатый сигнал u~(t) . При ДМ соседние значения ступенчатого напряжения различаются обязательно на один шаг квантования.
u(t) |
û(t) |
|
u'(t) |
0
t
sГТЧ(t)
0 
t
sДМ(t)
0
t
Рисунок 24.4 – Принцип формирования ДМ сигнала.
Шум квантования тем меньше, чем выше частота дискретизации и чем меньше шаг квантования. При малом шаге квантования возникают дополнительные искажения, называемые «перегрузкой по наклону», вызванные тем, что ступенчатая сигнал на выходе интегратора не успевает следит за изменениями исходного сигнала.
Частота следования импульсов при ДМ и ИКМ примерно одинакова при одинаковой верности передачи. Преимуществом ДМ является сравнительная простота кодирующих и декодирующих устройств. Шум ложных импульсов при ДМ меньше, чем при ИКМ.

98
25 ЛИНЕЙНЫЙ ЦИФРОВОЙ ФИЛЬТР
25.1 Цифровая обработка сигналов
Цифровая обработка сигналов (ЦОС; Digital Signal Processing, или DSP) – про-
цесс выполнения по заданной программе вычислительных операций над числами, однозначно отображающими эти сигналы.
ЦОС получила широкое распространение благодаря бурному развитию микропроцессорной техники. ЦОС удобна и проста в использовании, обходится дешевле и выполняется надежнее, чем аналоговая обработка сигналов. Кроме того, DSPсистемы дают возможность осуществлять такие операции, которые принципиально невозможны при аналоговой обработке (например, оцифрованную функцию можно сохранить в памяти компьютера, т.е. отложить обработку сигнала в реальном времени).
К достоинствам ЦОС относятся высокая гибкость и точность выполнения преобразований сигналов. Основным недостатком является ограниченное быстродействие.
Структурная схема СИСТЕМЫ ЦОС приведена на рисунке 25.1.
s вх(t) |
|
|
|
s вых(t) |
ФНЧ |
АЦП |
ЦП |
ЦАП |
ФНЧ |
|
|
(x0, x1, x2,…) |
(y0, y1, y2,…) |
|
Рисунок 25.1 – Структурная схема системы ЦОС.
На вход системы ЦОС поступает аналоговый сигнал sвх (t) . Входной фильтр низких частот (ФНЧ) отсекает паразитные частоты, которые лежат выше максимальной частоты информационного сигнала. В АЦП производится преобразование аналогового сигнала в цифровой с помощью операций дискретизации во времени, квантования по уровню и кодирования. Выходным сигналом АЦП является представляющая отсчеты входного сигнала последовательность двоичных чисел (x0, x1, x2,…), составленных из нескольких разрядов. Каждому разряду соответствует своя шина, так что они возникают на выходе АЦП одновременно (параллельный код). Числа поступают в цифровой процессор (ЦП), который осуществляет над ними различные математические операции. Ранее полученные и промежуточные результаты могут сохраняться в памяти процессора для использования в последующих вычис-
99
лениях. Результатом работы процессора является новая последовательность чисел (y0, y1, y2,…), представляющих собой отсчеты выходного сигнала. Аналоговый выходной сигнал восстанавливается по этой последовательности чисел с помощью цифро-аналогового преобразователя (ЦАП). Сигнал на выходе ЦАП имеет ступенчатую форму. При необходимости он может быть преобразован в плавно меняющийся выходной сигнал sвых(t) с помощью выходного ФНЧ, который отсекает все избыточные высокочастотные компоненты.
В цифровой форме можно создавать фильтры, анализаторы спектра, нелинейные преобразователи сигналов и др.
25.2 Цифровой фильтр
Фильтр – дискретная система, селектирующая или подавляющая те или иные диапазоны частот. Существуют четыре основных типа фильтров:
-фильтры низких частот (ФНЧ);
-фильтры высоких частот (ФВЧ);
-полосовые фильтры (ПФ);
-полосовые режекторные (заграждающие) фильтры (РФ).
Фильтры широко используются в системах связи для решения самых разных задач.
Например, селектирование одного из каналов в многоканальной системе, где отдельные каналы занимают смежные диапазоны частот; ограничение частот на входе приемника, благодаря чему любой шум и помехи на частотах, близких к полезному диапазону частот, эффективно отсекаются, позволяя улучшить качество работы системы в целом.
Фильтры могут быть пассивными (электронные схемы, не содержащие активных элементов, т.е.
транзисторов, операционных усилителей), активными (электронные схемы, содержащие активные элементы; легко реали-
зуется в виде интегральных микросхем), цифровыми (специализированные ЭВМ или микропроцессоры).
Цифровой фильтр (ЦФ) - фильтр, реализованный на основе методов ЦОС, т.е. выполняющий преобразование входного цифрового сигнала в выходной цифровой сигнал на основе заданного алгоритма цифрового преобразования.
Рассмотрим линейные стационарные ЦФ.
100
Свойство линейности означает применимость принципа суперпозиции: если входные последовательности отсчетов порождают соответствующие им выходные последовательности отсчетов: {хk (1) } {yk (1) } , {хk (2) } {yk (2) }, - то при подаче входной последовательности, являющейся линейной комбинацией указанных воздействий, выходная последовательность будет представлять собой линейную комбинацию указанных откликов: {αхk (1) + βxk (2) } {αyk (1) + βyk (2) }.
Свойство стационарности означает, что задержка входной последовательности на n тактов приведет к такой же задержке выходной последовательности: если
{хk } {yk }, то {хk −n } {yk −n }. Например:
(0, x0 , x1 , x2 ,...) (0, y0 , y1 , y2 ,...),
(0,0, x0 , x1 ,...) (0,0, y0 , y1 ,...) и т.д.
Чтобы проанализировать прохождение любого сигнала через линейный стационарный ЦФ, необходимо знать его импульсную характеристику, т.е. реакцию фильтра на единичный импульс: {xk (0) } = (1,0,0,...) {hk } = (h0 , h1 , h2 ,...) . Существует два типа ЦФ:
-фильтры с конечной импульсной характеристикой (КИХ), имеющие конечную во времени импульсную характеристику;
-фильтры с бесконечной импульсной характеристикой (БИХ), имеющие бесконечную во времени импульсную характеристику.
Из свойств линейности и стационарности вытекает общий алгоритм линейной цифровой фильтрации:
m
ym = x0 hm + x1hm−1 +... = ∑xk hm−k ,
k =0
где ym - m -ый отсчет выходного сигнала {yk }; {xk } = (x0 , x1 , x2 ,...) - сигнал на входе ЦФ;
{hk } = (h0 , h1 , h2 ,...) - импульсная характеристика ЦФ.
Формула показывает, что выходная последовательность есть дискретная свертка входного сигнала и импульсной характеристики фильтра. Смысл формулы: в момент каждого отсчета ЦФ проводит операцию взвешенного суммирования всех предыдущих значений входного сигнала. Роль последовательности весовых коэффициентов играют отсчеты импульсной характеристики. Другими словами, ЦФ обладает некоторой памятью по отношению к прошлым входным воздействиям.
101
26 РЕКУРСИВНЫЕ И НЕРЕКУРСИВНЫЕ ЦИФРОВЫЕ ФИЛЬТРЫ
26.1 Особенности формирования выходных сигналов
Для формирования выходного сигнала в k -ый момент времени tk = k∆t ЦФ могут использовать следующие данные:
- текущий отсчет входного сигнала xk ;
- некоторое число предшествующих отсчетов входного сигнала xk −1 , xk −2 , ..., xk −m ; - некоторое число предшествующих отсчетов выходного сигнала yk −1 , yk −2 , ..., yk −n . m и n - целые числа, определяющие порядок фильтра. Число m называют памятью ЦФ по входу, n - по выходу.
ЦФ с памятью по выходу называют рекурсивным (от англ. recur – возвращаться (к чему-либо), повторяться). Его реакция в каждый момент времени определяется текущим отсчетом воздействия, предысторией воздействия, предысторией реакции.
ЦФ без памяти по выходу называют нерекурсивным или трансверсальным (от англ. transverse – поперечный). Его реакция в каждый момент времени определяется текущим отсчетом воздействия, предысторией воздействия.
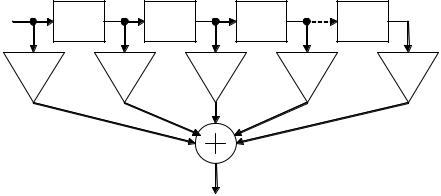
26.2 Нерекурсивный ЦФ
Такой фильтр работает по алгоритму:
yk = a0 xk + a1 xk −1 + a2 xk −2 +... + am xk −m ,
где a0 , a1 , a2 , ..., am - постоянные коэффициенты; m - число, определяющее порядок фильтра.
Графическим представлением алгоритмов цифровой фильтрации являются структурные схемы.
xk |
z-1 |
z-1 |
|
z-1 |
z-1 |
|
a0 |
a1 |
a2 |
a3 |
am |
yk
Рисунок 26.1 – структурная схема не рекурсивного ЦФ.
|
102 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Схема содержит m |
элементов задержки |
на |
шаг |
дискретизации, |
m +1 |
|||||||||||||
умножителей на постоянные коэффициенты и многовходовый сумматор. |
|
|
|
|
||||||||||||||
Таблица 26.1 – Принцип действия нерекурсивного ЦФ. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Момент времени |
Входной отсчет |
|
|
|
|
|
Выходной отсчет |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
t0 = 0 |
x0 |
|
|
|
|
|
|
|
|
y0 = a0 x0 |
|
|
|
|
|
|||
t1 = ∆t |
x1 |
|
|
|
|
|
|
|
y1 = a0 x1 + a1 x0 |
|
|
|
||||||
t2 = 2∆t |
x2 |
|
|
|
|
|
y2 = a0 x2 + a1 x1 + a2 x0 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tk = k∆t |
xk |
y |
k |
= a |
x |
k |
+ a x |
k −1 |
+ a |
x |
k |
−2 |
+... + a |
m |
x |
k −m |
||
|
|
|
|
0 |
|
|
1 |
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсчеты импульсной характеристики трансверсального ЦФ совпадают с коэффициентами постоянными коэффициентами:
{hk } = (a0 , a1 , a2 , ..., am ) .
Она содержит конечное число отсчетов. В связи с этим трансверсальные ЦФ называют фильтрами с конечной импульсной характеристикой (КИХ-фильтрами).
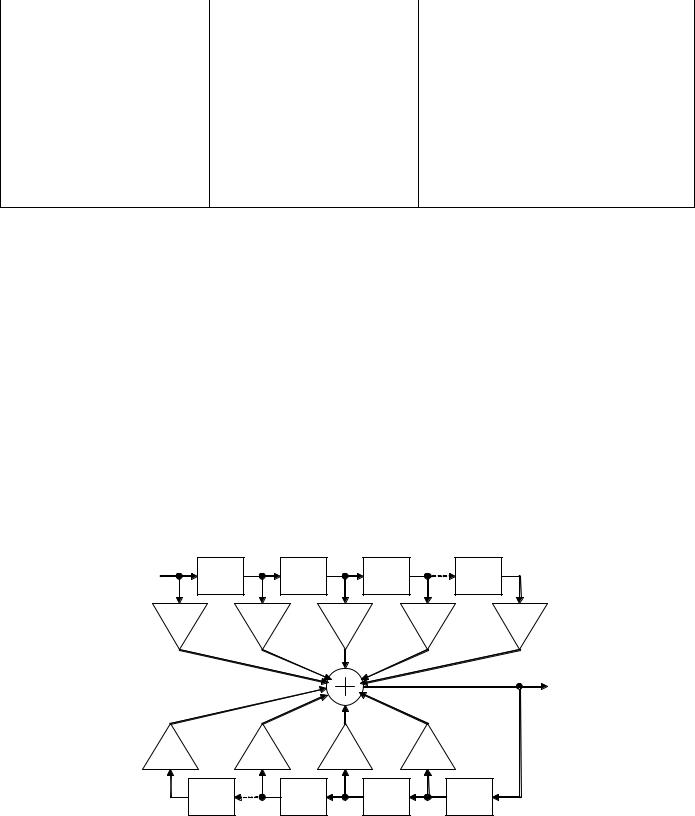
26.3 Рекурсивный ЦФ
Такой фильтр работает по алгоритму:
yk = a0 xk + a1 xk −1 + a2 xk −2 +... + am xk −m +b1 yk −1 +b2 yk −2 +... +bn yk −n ,
где b1 , b2 , ..., bn - постоянные коэффициенты.
Построенная по этому алгоритму структурная схема отвечает прямой форме ре-
ализации.
xk |
z-1 |
|
z-1 |
z-1 |
z-1 |
|
a0 |
a1 |
a2 |
a3 |
am |
yk
bn |
b3 |
b2 |
b1 |
z-1 |
z-1 |
z-1 |
z-1 |
Рисунок 26.2 – Структурная схема рекурсивного ЦФ при прямой форме реализации.