

32 |
Лектор Садовец В.Ю. |
жения начальных звеньев.
При работе механизма отдельные его звенья в общем случае совершают движение с ускорением, поэтому при силовом анализе использу-
ется принцип Даламбера, согласно которому звено механизма может рассматриваться как находящееся в равновесии, если ко всем внешним силам, действующим на него, добавить силы инерции. Этот прием упро-
щает решение задач силового анализа, так как позволяет использовать уравнения равновесия, называемые уравнениями кинетостатики, чтобы отличить их от обычных уравнений статики - уравнений равновесия без учета сил инерции.
Силовое исследование механизма с применением сил инерции назы-
вается кинетостатическим исследованием механизма.
Силовой расчёт начинают с кинематического анализа механизма. Конечной целью этого анализа является определение ускорений центров масс и угловых ускорений звеньев. При графическом решении задачи ускорения определяют с помощью плана ускорений, которому неизбежно предшествует план скоростей. По ускорениям вычисляют силы инерции каждого из подвижных звеньев.
Силы инерции
Силы инерции представляют сначала в виде главного вектора I и главного момента М. Эти величины определяют по формулам
|
|
=−mas , M =−J sε , |
(1) |
I |
|||
где m - масса звена, as - ускорение центра масс, м/с2;
J s - момент инерции звена относительно центра масс, кг·м2; ε -
угловое ускорение звена, с-2.
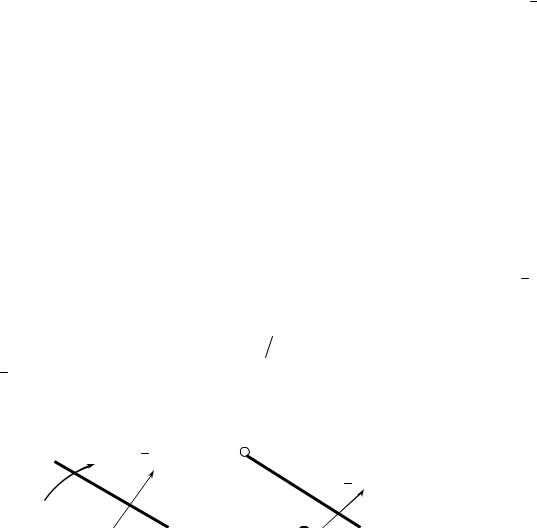
Главный вектор прикладывают к центру масс звена (рис. 1, а) и направляют противоположно aS . Главный момент располагают в произ-
вольном месте звена и направляют противоположно ε .
Для упрощения системы сил инерции избавляются от главного момента М . Это делают параллельным смещением главного вектора I на расстояние x , которое определяют по формуле:
x = M I , м. |
(2) |
Вектор I смещают так, чтобыонстремился повернуть звено вокруг центрамассвнаправлениимомента М (рис. 1,б).
 ε I
ε I
I

33 |
Лектор Садовец В.Ю. |
При I =0 главный момент представляют в виде пары сил I ′, I ′′ с произвольным плечом h. При этом I ′=M/h. После сил инерции определяют реакции связей.
Момент инерции i −го звена JSi |
в общем случае определяется как |
|
произведение массы звена mi на квадрат его радиуса инерции ρi : |
|
|
JSi |
= mi ρi |
(3) |
Для тел простой рычажной формы и постоянной плотности моменты инерции JSi определяются аналитически по следующей приближен-
ной формуле:
J |
Si |
= |
mi li |
(4) |
|
||||
|
12 |
|
||
|
|
|
||
где li - длина звена i, м.
Условие статической определимости плоских кинематических цепей
Кинематическая цепь называется статически определимой в том случае, если число уравнений равновесия, которое можно составить для данной цепи, равно числу неизвестных параметров, характеризующих реакции в кинематических парах.
Известно, что сила реакции в кинематической паре определяется тремя параметрами: величиной, направлением и точкой приложения. Во вращательной паре, если не учитывать силы трения, равнодействующая сила реакции проходит через центр шарнира, то есть точка приложения реакции известна. Величина и направление равнодействующей силы остаются неизвестными.
В поступательной паре, если не учитывать силы трения, известно направление реакции (перпендикулярна к направлению относительного
34 |
Лектор Садовец В.Ю. |
перемещения звеньев). Неизвестными остаются точка приложения и величина реакции.
Таким образом, при определении реакций в каждой из низших кинематических пар имеют дело с двумя неизвестными параметрами из трех, характеризующих любую силу.
Возьмем плоскую кинематическую цепь, состоящую из n подвижных звеньев, соединенных низшими кинематическими парами р5 . Если к
числу внешних сил, приложенных к звеньям этой цепи, добавить силы инерции, то цепь можно рассматривать как находящуюся в равновесии.
Для каждого звена можно составить три уравнения равновесия, а для всей кинематической цепи, имеющей п подвижных звеньев -Зп уравнений. При наличии р5 пар общее число неизвестных параметров реак-
ций в цепи равно 2 р5 . Тогда принцип кинетостатической определимости
плоской кинематической цепи можно записать в следующим виде: 3п = 2 р5
откуда
р5 =1,5п
Такое соотношение звеньев и кинематических пар характерно для групп Ассура. Таким образом, все кинематические цепи, называемые группами Ассура, являются статически определимыми. Поэтому силовой расчет следует производить, расчленяя механизм на группы Ассура. Расчет ведется для каждой группы, начиная с последней в порядке присоединения к начальному механизму, то есть с наиболее удаленной от начального звена группы.
Силовой расчет плоских механизмов методом планов сил
Графическое определение реакций в кинематических парах плоских механизмов методом построения планов сил (или силовых многоугольников) применяется не только в силу наглядности, но и потому, что действующие на звенья механизма внешние силы известны лишь очень приближенно и точность графических построений оказывается вполне достаточной.
В четырехзвенных рычажных механизмах обнаруживается только одна группа Ассура, поэтому ограничимся только еюи начальным звеном. Методи- курасчетарассмотримнапримерекривошипно-ползунногомеханизма.
Силытяжести звеньев, вовсех заданиях, определяем поформуле
Gi = mi g , Н. |
(5) |

|
|
35 |
|
Лектор Садовец В.Ю. |
|||
Вектора сил тяжести звеньев прикладываются к центрам масс и на- |
|||||||
правляются вертикально вниз. |
|
|
|
|
|||
Вычисляем силы и моменты сил инерции звеньев: |
|
|
|||||
1. |
кривошипа |
I1 = m1 aS , |
Н; |
M1 = JS |
ε1, |
Н·м; |
|
т.к. ε1 = 0, то M1 = 0 ; |
1 |
|
1 |
|
|
||
I2 = m2 aS2 , |
H; |
M 2 = JS2 |
ε2 , |
Н·м; |
|||
2. |
шатуна |
||||||
где ε2 = aτcb  lBC .
lBC .
3. |
ползуна |
I3 = m3 aS3 , |
Н; |
M3 = JS3 ε3 , |
Н·м; |
т.к. ε3 = 0 , то M3 = 0 ;
Чтобы избавиться от момента инерции M 2 , необходимо сместить вектор силы инерции I2 параллельно самому себе на расстояние х2 = М2  I2 , м. Масштабное значение расстояния х2 определяем по формуле х2 = х2 μl , мм. Направление смещения примем таким образом, чтобы вектор силы инерции I2 создавал относительно центра масс звена 2 момент, совпадающий по направлению с моментом сил инерции M 2 .
I2 , м. Масштабное значение расстояния х2 определяем по формуле х2 = х2 μl , мм. Направление смещения примем таким образом, чтобы вектор силы инерции I2 создавал относительно центра масс звена 2 момент, совпадающий по направлению с моментом сил инерции M 2 .
Движущие силы, приложенные к кривошипу, в нашей задаче представлены в виде движущего момента M Д . Представим его как пару сил FД , FД′ ,
действующих на кривошип с плечом lАВ. Пунктирное начертание векторов FД , FД′ означает, чтоонинеизвестны.
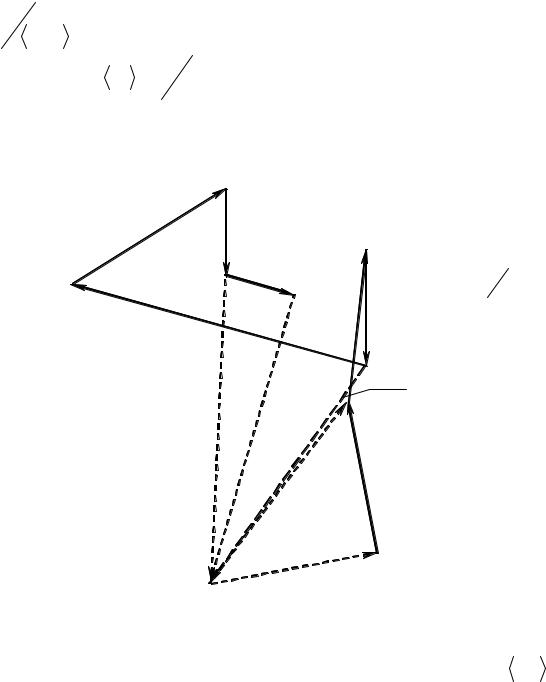
Пример 1. Дана кинематическая схема кривошипно-ползунного механизма, также известны массы звеньев т1, т2, т3, моменты инерции звеньев относительно центров масс JS1, JS2, и сила полезного сопротивления FПС, определены скорости и ускорения точек и звеньев механизма. Скопируем положение механизма и план ускорений из практической работы «Планы скоростей и ускорений» (рис. 2,аирис. 2,б).
Требуется определить силы реакций в кинематических парах R01, R12 , R23 , R30 идвижущиймоментM Д
На заданном для расчета плане положения механизма (рис. 2,в) покажем в безразмерной форме направления векторов сил тяжести, сил инерции, силу полезного сопротивления, а также направление моментов инерции звеньев.

|
|
|
|
36 |
|
Лектор Садовец В.Ю. |
||||
|
y |
B |
ε2 |
|
|
μl |
=Kм |
мм |
||
|
|
|
|
|||||||
|
S1 |
|
|
S2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|||
ω1 |
|
|
|
|
|
C, S3 |
|
|
||
|
A |
|
|
|
|
|
|
|
|
x |
|
|
|
а) |
|
|
|
|
|
|
|
|
с |
|
аc |
|
|
π |
|
|
|
|
|
аτсb |
|
аS2 |
|
аb |
|
μа =K |
м с2 |
||
|
s2 |
|
|
|
мм |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
аn |
асb |
|
|
б) |
|
|
|
|
|
|
сb |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
B |
I1 |
I2 |
μ |
|
=Kм |
мм |
|||
|
l |
|||||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
К |
|
h2 |
|
|
|
|
|
F'Д |
|
FД |
S2 |
|
C, S3 |
|
|
|||
G1 |
|
|
|
|
||||||
|
|
G2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
||
A |
|
|
x |
|
М2 I3 |
|
|
|
|
FПС |
|
|
|
|
|
|
|
|
|||
|
|
|
в) |
|
|
|
|
G3 |
|
|
Рисунок 2
Вектор силы полезного сопротивления направлен противоположно скорости VC .
Силовой расчёт можно вести, разложив механизм на отдельные звенья и решив систему уравнений равновесия сразу для всех звеньев. Однако уравнений равновесия при этом будет слишком много. Чтобы сократить число совместно решаемых уравнений равновесия, механизм разложим на такие цепи звеньев, в которых число уравнений равновесия равно числу искомых реакций связей. Этими цепями являются группы Ассура. Разложение на группы Ассура, начнём со звена 1, на которое действует незаданная внешняя сила в виде момента M Д . При этом первую и един-
37 |
Лектор Садовец В.Ю. |
ственную группу Ассура образуют звенья 2, 3. С этой группы и начнём силовой расчёт.
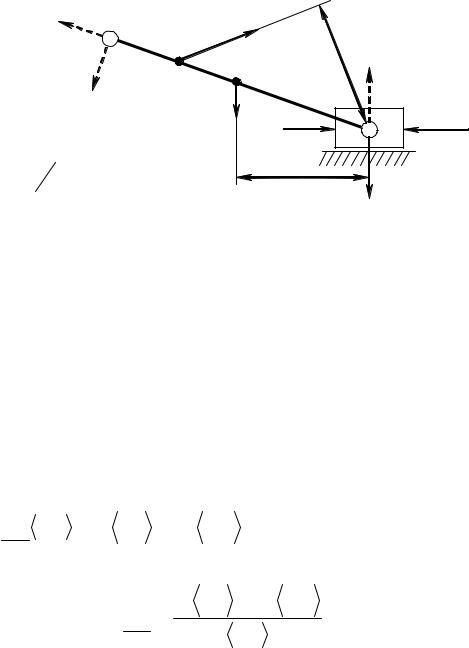
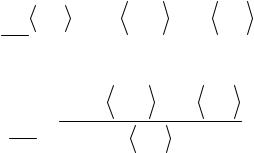
Для расчёта скопируем группу в заданном положении с рис. 2,в. Приложим к группе внешние силы, реакции связей и силы инерции (рис. 3)
|
Rn |
B |
I2 |
|
|
|
|
|
12 |
|
hI2 |
|
|||
|
|
τ |
К |
|
|
R |
|
|
|
R12 |
S2 |
|
|
|
03 |
|
|
|
|
|
|
||
|
|
|
|
G2 |
|
C, S3 |
|
|
=Kм |
|
|
|
I3 |
|
FПС |
μl |
мм |
|
|
hG |
|
G3 |
|
|
|
|
Рисунок 3 |
2 |
|
|
|
|
|
|
|
|
|
||
СогласнопринципуДаламбера, поддействиемтакойсистемысилгруппа должна находиться в равновесии. Комбинируя уравнения равновесия отдельных звеньев и группы в целом, найдём реакции внешних и внутренних связей группы.
При графическом решении задачи используют уравнения равновесия в форме суммы моментов – ∑М =0 , создаваемых силами относи-
тельно выбранной точки, и в форме геометрической суммы сил – ∑F =0 , действующих на группу Ассура. Составим уравнение моментов
относительно точки С. Правило знаков: если сила вращает звено, относительно точки С, по часовой стрелке то момент, создаваемый относительно этой точки, будет отрицательный, если против – часовой знак плюс.
∑MC = 0 : R12τ lBC |
− I2 |
hI |
2 |
+G2 hG |
= 0. |
(2) |
|
|
|
2 |
|
|
|
|
|
|
Отсюда
τ |
= |
I2 hI2 |
−G2 |
hG2 |
. |
(6) |
R |
|
|
|
|||
12 |
|
|
lBC |
|
|
|
|
|
|
|
|
|
Если ответ будет со знаком «плюс», то принятое направление вектора реакции R12τ – верное. В противоположном случае на принятом направлении вектора R12τ поставим метку, например крестик, означающий,
что истинное направление вектора противоположно принятому. Составим уравнение геометрической суммы сил, приложенных к
группе Ассура 2,3:

38 |
Лектор Садовец В.Ю. |
∑Fi = 0 :
(2,3)
|
12τ + |
|
2 + |
|
3 + |
|
2 + |
|
3 + |
|
ПС + |
|
03 + |
|
12n = 0. |
(7) |
R |
G |
G |
I |
I |
F |
R |
R |
Сплошной чертой в уравнении подчеркнуты искомые силы. Уравнение геометрической суммы решают графически. Перед построением плана сил задаются длиной вектора, который будет изображать самую большую из сил, известных на данный момент. Пусть это будет сила полезного сопротивления FПС , тогда масштабный коэффициент плана сил опре-
делиться по формуле: μF = FПС FПС , H/мм.
По формуле Fi = Fi μF , мм, вычисляем графические значения сил,
входящих в уравнение 7.
R12 |
R12n |
|
μ |
F |
=KН |
мм |
|
|
|
||||
|
I2 |
|
|
R23 |
||
R12τ |
|
|
|
|
||
|
|
G2 |
|
FПС |
||
|
|
|
|
|
G3 |
R |
G3 |
R |
|
FПС |
|
|
03 |
|
|
|
|
|||
|
03 |
|
|
|
I3 |
|
|
I3 |
|
|
|
|
|
|
а) |
|
|
|
б) |
|
|
|
|
|
|
||
Рисунок 4
Складывая графически вектора сил, согласно уравнению 2, определим направлениявекторовиграфическиезначенияреакций R12n , R23 , R30 (рис. 4,а).
Соединяя начало вектора составляющей реакции R12n с концом R12τ , найдем полную реакцию R12 . Составим уравнение геометрической суммы сил, приложенных к звену 3:
∑Fi = 0 :
(3)
|
3 + |
|
3 + |
|
ПС + |
|
03 + |
|
23 = 0. |
(8) |
G |
I |
F |
R |
R |
Решая уравнение (8), найдем реакцию R23 (рис. 4,б). Истинные значения всех сил, найденных по рис. 4, определим по формуле
Rij = μF Rij , Н.
39 |
Лектор Садовец В.Ю. |
Для расчета начального механизма 0,1, скопируем его в заданном положении с рис. 2,в (рис. 5,а). Приложим к звену 1 внешние силы, реакции связей и силы инерции. Реакцию R21 возьмем из предыдущего расчета: она численно
равназначениюипротивоположнапонаправлениюреакции R12 .
μl =Kм мм |
|
|
μF =KН |
мм |
|
|
|
R21 |
|
|
|
|
hR |
I1 |
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
B |
R21 |
R01 |
|
F'Д |
S1 |
|
|
|
|
|
G1 |
FД |
|
|
|
|
|
|
|
||
|
|
G1 |
I1 |
|
|
A |
hG |
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
1 |
а) |
|
б) |
|
|
|
|
|
||
Рисунок 5
Реакции связей звена 1 со стойкой неизвестны, скроем пока эти реакции изображением стойки. Под действием приложенных сил звено 1 должно находиться в равновесии. Составим уравнение моментов относительно точки А (правило знаков см. выше):
∑M A = 0 : −FД lAB |
−R21 hR |
|
−G1 hG |
=0. |
|
|
(1) |
21 |
1 |
|
|
||
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
|
FД = |
−R21 hR |
−G1 |
hG |
(9) |
|
|
|
21 |
|
1 . |
||
|
|
|
lAB |
|
|
|
Из уравнения 9 определим движущую силу FД . Ответ будет со зна- |
||||||
ком «минус». Это значит, что направление вектора силы FД |
выбрано не- |
|||||
правильно. Ставим на выбранном направлении крест, что означает: вектор направлен в противоположную сторону. Движущий момент определим по формуле
МД = FД lAB , Н·м. |
(10) |
Составим уравнение геометрической суммы сил, приложенных к звену 1:
40 Лектор Садовец В.Ю.
∑Fi = 0 : R21 +G1 +I1 +R01 =0.
(1)
Решаяграфическиэтоуравнение, определим R01 (рис. 5,б).
Пример 2. Дана кинематическая схема шарнирного четырехзвенного механизма, также известны массы звеньев т1, т2, т3, моменты инерции звеньев относительно центров масс JS1, JS2, JS3 и сила полезного сопротивления FПС, определены скорости и ускорения точек и звеньев механизма.
Требуется |
определить |
силы реакций в кинематических парах |
R01, R12 , R23 , R30 |
и движущий |
моментM Д |
Скопируем положение механизма и план ускорений из практической работы «Планы скоростей и ускорений».
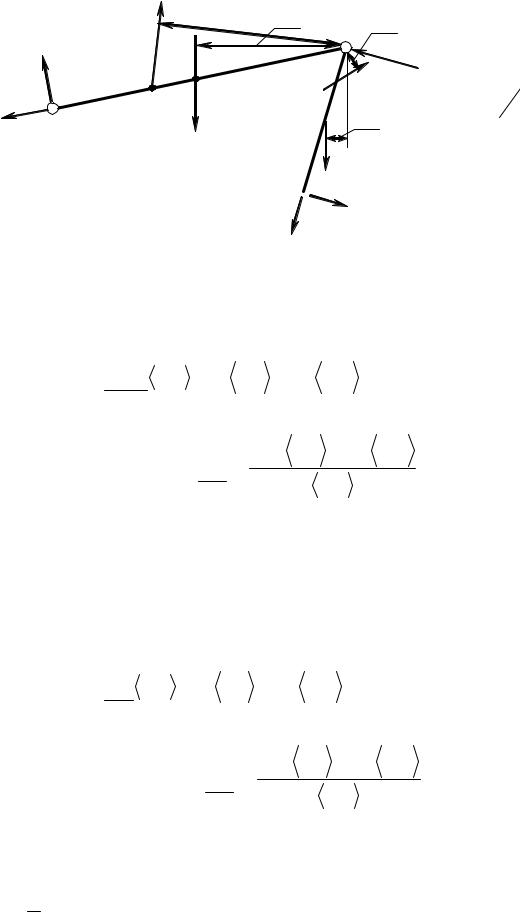
На заданном для расчета плане положения механизма (рис. 6,в) покажем в безразмерной форме направления векторов сил тяжести, сил инерции, силу полезного сопротивления, а также направление моментов инерции звеньев.

|
41 |
ε2 |
C |
S2 |
|
B |
ε3 |
y |
S3 |
S1 |
|
ω1 |
D |
A |
|
π
ас |
аn |
|
|
с |
с |
|
|
аτс |
а |
S2 |
аb |
|
n2 |
||
|
|
|
Лектор Садовец В.Ю.
μl =Kммм
x
а)
μа =Kмммс2
s2 |
|
а |
аτсb |
|
сb |
|
|
b |
|
аn |
|
n1 |
сb |
б) |
|
|
I2 |
h2 |
М2 |
C |
|
|
|
|
|
|
|
|
|
|
|||
I1 |
|
|
|
FПС |
|
|
||
FД |
|
|
K3 |
h3 I3 |
|
|
||
B |
S2 |
|
|
=Kм |
|
|||
K2 |
М3 |
|
μl |
мм |
||||
S1 |
|
G2 |
S3 |
|
|
|
||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
G1 |
|
|
D |
G3 |
|
|
|
|
F’Д |
A |
|
|
|
в) |
|
|
Рисунок 6
Силытяжестизвеньев1, 2, 3 определяемпоформуле(3).
Вектор силы полезного сопротивления FПС направлен противоположно скоростиVc .
Вычисляем силы и моменты инерции звеньев:

|
|
|
|
|
|
|
|
42 |
|
|
|
|
Лектор Садовец В.Ю. |
||||
1. |
|
кривошипа |
(звено |
1) |
I1 |
= m1 |
aS , |
Н; |
M1 |
= JS |
ε1, |
Н·м; |
|||||
|
т.к. ε1 = 0, то M1 = 0 ; |
|
|
|
|
|
1 |
|
|
1 |
|
|
|||||
|
I2 = m2 aS2 , |
H; |
M 2 = JS2 |
ε2 , |
Н·м; |
||||||||||||
2. |
|
шатуна (звено |
2) |
||||||||||||||
|
где ε2 = aτcb |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
lBC |
|
I3 = m3 aS3 , |
Н; |
M3 = JS3 |
ε3 , |
Н·м; |
|||||||
3. |
|
коромысла |
(звено3) |
||||||||||||||
|
где ε3 = аτсd |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
lCD |
равен нулю, поэтому на рисунке 6,в он не пока- |
||||||||||||
Моменты инерции M1 |
|||||||||||||||||
зан. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Чтобы избавиться от моментов инерции M 2 , M3 |
необходимо сместить |
||||||||||||||||
вектора сил инерции I2 , I3 |
параллельно самим себе (рис. 6,в) на расстояние |
||||||||||||||||
h = M 2 |
I2 |
и h = M3 |
, м, соответственно. Масштабные значения расстоя- |
||||||||||||||
2 |
|
3 |
|
I3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ний h |
и h |
определяем по формулам |
h |
|
= h2 |
μl |
и h |
= h3 |
, мм. Направ- |
||||||||
2 |
|
3 |
|
|
|
|
|
2 |
|
|
3 |
|
μl |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ление смещения примем таким образом, чтобы вектора сил инерции I2 и I3
создавали относительно точек центров масс звеньев 2 и 3 моменты, совпадающиепонаправлениюсудаляемымимоментамиинерции M 2 и M3 .
Движущие силы, приложенные к кривошипу, в нашей задаче представлены в виде движущего момента M Д . Представим его как пару сил FД , FД′ ,
действующих на кривошип с плечом АВ. Пунктирное начертание векторов FД , FД′ означает, чтоихнаправленияпредварительные.
Силовой расчет начнем с разбиения механизма на группы Ассура. Разложение на группы Ассура начинают со звена 1, на которое действует незаданнаявнешняясилавформемомента M Д . Приэтомпервуюиединственную
группу Ассура будут образовывать звенья 2, 3. С этой группы и начнем силовойрасчет.
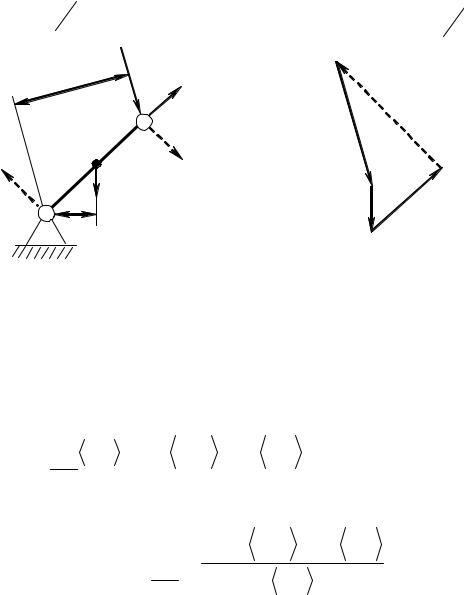
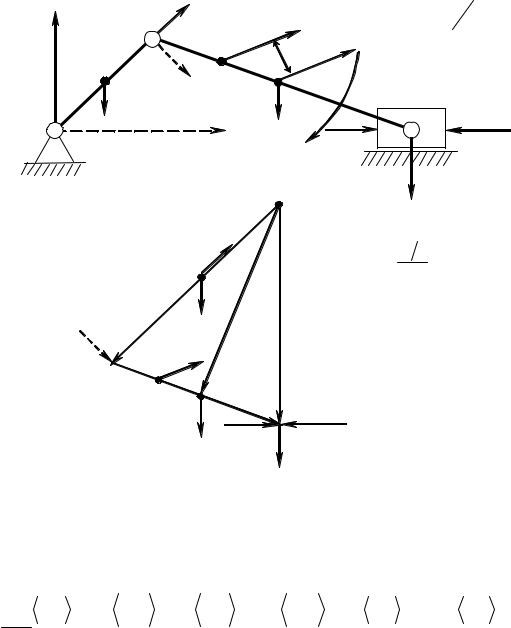
Для расчёта скопируем группу в заданном положении с рис. 6,в. Приложимкгруппевнешниесилы, реакциисвязейисилыинерции(рис. 7).
I2 |
hI2 |
Rτ |
|
12 |
|
K2 |
S2 |
Rn В |
G2 |
12 |
|
43
hG2 C hI3
K3  I3
I3
S3  hG3
hG3
G3
D 
Rτ
R03n 03
Лектор Садовец В.Ю.
FПС
μl =Kм мм
а)
Рисунок 7
Составим уравнение моментов относительно точки С для сил приложенныхкзвену2.
∑MC = 0 : − R12τ lBC − I2 |
hI |
+G2 |
hG |
= 0. |
|
|
||
(2) |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
|
|
τ |
= |
− I2 hI2 |
+G2 |
hG2 |
. |
(11) |
||
R12 |
|
|
lBC |
|
|
|||
|
|
|
|
|
|
|
|
|
Если ответ будет со знаком «плюс», то принятое направление вектора реакции R12τ – верное. В противоположном случае на принятом направлении вектора R12τ поставим метку, например крестик, означающий,
что истинное направление вектора противоположно принятому. Составим уравнение моментов относительно точки С для сил приложен-
ныхкзвену2.
∑MC =0 : R03τ lCD + I3 |
hI |
3 |
+G3 |
hG |
= 0. |
|
|
|
(3) |
|
|
3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
|
|
|
τ |
= |
− I3 |
hI3 |
−G3 |
hG3 |
. |
(12) |
R03 |
|
lCD |
|
|||||
|
|
|
|
|
|
|
||
Отсюда определяют Rτ |
(точно также как и Rτ |
) |
||||||
03 |
|
|
|
|
|
|
12 |
|
Составим уравнение геометрической суммы сил, приложенных к группе Ассура 2,3:
∑Fi = 0 :
(2,3)
44 |
|
|
|
|
|
Лектор Садовец В.Ю. |
||||||||||||
|
12τ + |
|
2 + |
|
2 + |
|
ПС + |
|
3 + |
|
3 + |
|
τ03 + |
|
03n + |
|
12n = 0. |
(13) |
R |
G |
I |
F |
I |
G |
R |
R |
R |
||||||||||
В выражении 13 неизвестные силы подчеркнуты сплошной линией. Уравнение геометрической суммы решают графически. Решение называется планом сил. Перед построением плана сил задаются длинной вектора, который будет изображать самую большую из сил, известных на данный момент. Пусть это будет сила полезного сопротивления FПС . Тогда
масштабный коэффициент плана сил определиться по формуле
μF = FПС FПС , H/мм.
По формуле Fi = Fi μF , мм, вычисляем графические значения сил,
входящих в уравнение 11.
Складывая графически вектора сил, согласно уравнению 2, определим направлениявекторовиграфическиезначенияреакций R12n , R03n (рис. 8).
I3 G3
Rτ |
μ |
|
=KН |
|
03 |
F |
мм |
||
|
|
|
||
I2 |
G2 |
|
|
|
FПС |
|
|
|
|
R03n R12
R03
R12τ
R12
R12n
Рисунок 8
Истинные значения этих силнаходят по формуле Rij = μF Ril , Н. Составимуравнениегеометрическойсуммысил, приложенныхкзвену3:
∑ |
|
=0 : |
|
ПС + |
|
3 + |
|
3 + |
|
τ03 + |
|
03n + |
|
23 = 0. |
(14) |
|
|
F |
I |
G |
R |
R |
R |
||||||||||
Fi |
||||||||||||||||
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45 |
Лектор Садовец В.Ю. |
Это уравнение можно решить, построив отдельный план сил, или воспользоваться уже построенным. Последнее возможно только в случае, если сначала сложены силы, действующие на одно из звеньев группы, затем на другое. Именно так выполнено на нашем плане. Замыкая цепь сил, действующих на звено 3, получаем вектор R23 . На этом расчет группы 2,3
закончен.
Для расчета начального механизма 0,1, скопируем его в заданном положении с рис. 6,в (рис. 9,а). Приложим к звену 1 внешние силы, реакции связей и силы инерции. Реакцию R21 возьмем из предыдущего расчета: она численно
равназначениюипротивоположнапонаправлениюреакции R12 .
Реакции связей звена 1 со стойкой неизвестны, скроем пока эти реакции изображением стойки. Под действием приложенных сил звено 1 должно находиться в равновесии. Составим уравнение моментов относительно точки А (правило знаков см. выше):
∑M A = 0 : FД lAB |
+R21 hR |
+G1 |
hG |
|
=0. |
|
(1) |
|
21 |
1 |
|
||
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
FД = |
−R21 hR |
−G1 hG |
. |
(15) |
||
|
21 |
|
1 |
|||
|
|
lAB |
|
|
|
|
Из уравнения 15 определим движущую силу FД . Ответ будет со знаком |
||||||
«минус». Этозначит, чтонаправлениевекторасилы FД |
выбранонеправильно. |
|||||
Ставим на выбранном направлении крест, что означает: вектор направлен в противоположнуюсторону.

|
|
|
46 |
Лектор Садовец В.Ю. |
|||
μl |
=Kм |
мм |
μ |
F |
=KН |
мм |
|
|
|
|
|
|
|||
I1 |
|
|
R21 |
|
|
|
G1 |
|
|
|
R01 |
|
|||
B |
|
|
hR21 |
|
|
|
|
FД |
|
S1 |
I1 |
|
|
R21 |
|
|
G1 |
|
|
|
|
||
|
F'Д |
|
|
|
|
||
|
hG |
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
а) |
б) |
|
|
|
Рисунок 9 |
|
Движущий момент определим по формуле |
|
МД = FД lAB , Н·м. |
(16) |
Составим уравнение геометрической суммы сил, приложенных к звену 1:
∑Fi = 0 : G1 +R21 +I1 +R01 =0.
(1)
Решаяграфическиэтоуравнение, определим R01 (рис. 9,б).
Определение уравновешивающей силы методом Н.Е. Жуковского
В тех случаях, когда нет необходимости определять реакции в кинематических парах, а требуется определить уравновешивающую силу Fур или уравновешивающий момент Мур, пользуются теоремой Н. Е.
Жуковского: «Если к повернутому плану скоростей на угол 900 приложить в одноименные точки вектора всех активных сил (в том числе Fур ) и сил инерции, то сумма моментов этих сил относительно полюса
будет равна «нулю»
Таким образом, равновесию механизма соответствует равновесие плана скоростей, рассматриваемого как «жесткий рычаг», шарнирно закрепленный в полюсе р.
47 |
Лектор Садовец В.Ю. |
Чаще всего с помощью рычага Жуковского производят проверку силового расчета механизма, путем определения Fур и сравнения ее с движущей силой FД , рассчитанной при силовом анализе. Рассмотрим
построение рычага Жуковского на примере кривошипно-ползунного механизма, схема механизма, с указанием векторов всех внешних сил, действующих на механизм, представлена на рис. 10, а.
y |
B |
I1 |
I2 |
|
μ |
|
=Kм |
мм |
|
|
|
l |
|||||||
|
|
|
|
|
|
||||
|
К |
|
|
|
|
|
|||
S1 |
|
h2 |
|
|
|
|
|
|
|
|
Fур |
S2 G2 |
|
C, S3 |
|
||||
|
G1 |
|
|
||||||
|
|
|
|
||||||
A |
|
x |
М2 |
I3 |
|
|
|
|
FПС |
|
|
|
|
|
|
||||
|
|
а) |
р |
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
μv |
=K |
м с |
|
||
|
|
s2 |
|
|
|||||
|
|
|
|
|
|
мм |
|
||
Fур |
|
G1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
I2 |
|
б) |
|
|
|
|
|
k |
s2 |
с |
FПС |
|
|
|
|
|
|
|
|
G2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
I3 G3
Рисунок 10
На рис.10, б представлен повернуты план скоростей с перенесенными в одноименные точки векторов сил (точка k определена по теореме подобия). Сумма моментов, относительно точки р, будет равна
Fур pb +G1 hG1 +I2 hI2 +G2 hG2 +I3 pc −FПС pc =0. (17)
Из уравнения 17 определяют Fур и сравнивают с FД , если все правильно они должны быть равны друг другу.
Силы трения
48 |
Лектор Садовец В.Ю. |
Общее сопротивление, возникающее на поверхности двух соприкасающихся тел при их относительном движении под действием внешней силы, называется силой трения.
Основной причиной трения является шероховатость тел, находящихся в соприкосновении. При движении одного относительно другого в зонах фактического контакта происходит сцепление, возникают упругие, вязкие или пластические деформации соприкасающихся элементов, развиваются силы молекулярного взаимодействия. Появляющееся в результате этого суммарное сопротивление движению одного тела по другому и представляет силу трения.
Известная формула для определения силы трения скольжения F = f N была сформулирована Леонардом да Винчи еще в 1518 году,
затем подтверждена Кулоном в 1785 году. Этой приближенной формулой пользуются при инженерных расчетах и по сей день. Это объясняется тем, что величина силы трения зависит от очень многих факторов, при этом значимость отдельных факторов до сих пор не выявлена в силу отсутствия экспериментальных данных.
Трение бывает внешнее и внутреннее. При расчете звеньев из металла внутреннее трение обычно не учитывают. В зависимости от кинематического признака различают следующие виды трения: скольжения, качения, верчения, качения с проскальзыванием, трение при виброперемещениях.
Трение скольжения -это трение, возникающее в том случае, когда поверхность одного тела скользит по поверхности другого тела.
В зависимости от состояния поверхностей трущихся тел и наличия смазки различают еще несколько видов трения: чистое, сухое, граничное, жидкостное, полужидкостное, полусухое, трение с воздушной смазкой.
Чистое трение возникает на поверхностях очищенных от посторонних примесей (адсорбированных пленок или химических соединений).
Сухое трение возникает при отсутствии смазки и загрязнений между поверхностями.
Граничное трение - это трение, при котором поверхности разделены очень незначительным слоем смазки (мене 0,1 мк).
Жидкостное трение - это такой вид трения, когда трущиеся поверхности полностью разделены слоем смазывающей жидкости.
Полужидкостное трение - это сочетание жидкости и граничного, или жидкостного и сухого трения.
49 |
Лектор Садовец В.Ю. |
Полусухое трение - это смешанное трение, одновременно и граничное и сухое.
Трение с воздушной смазкой наблюдается при очень больших скоростях, когда возникают большие аэродинамические давления, и элементы трущейся пары оказываются деленными воздушной прослойкой.
Основными видами трения считаются сухое и жидкостное, все остальные виды относятся к промежуточным.
В курсе ТММ рассматривается только сухое трение, так как жидкостное трение следует рассматривать на основе законов термодинамики.
Приведение масс, моментов инерции, сил и моментов сил
Замену системы масс подвижных звеньев механизма приведенной массой, сосредоточенной в произвольно выбранной точке, или приведенным моментом инерции звена приведения, производят на основе эквивалентности мгновенных значений кинетической энергии.
В общем случае плоскопараллельного движения звена его кинематическая энергия определяется по формуле
Ti = |
1 |
(miVSi2 |
+ JSi2 ωi2 ), |
(18) |
|
2 |
|
|
|
где mi - масса звена i;
VSi - скорость центра тяжести звена i;
JSi - момент инерции звена i относительно оси, проходящей через центр тяжести Si ;
ωi -угловая скорость звена i.
Общая кинетическая энергия механизма для любого его положения равна кинетической энергии всех подвижных звеньев.
Для механизма с одной степенью подвижности его кинетическую энергию вычисляют через приведенную массу mn или приведенный моментJn по формуле:
|
1 |
n |
1 |
|
|
1 |
|
|
|
Tмех = |
∑(miVSi2 + JSiωi2 ) = |
mnVn2 |
+ |
Jnωn2 , |
(19) |
||||
|
2 |
2 |
|||||||
|
2 i=1 |
|
|
|
|
||||
где n - число подвижных звеньев;
Vn и ωn - скорости соответственно точки и звена приведения.
Отсюда:
|
|
|
50 |
|
|
|
|
|
|
Лектор Садовец В.Ю. |
|||||
n |
|
|
VSi |
|
2 |
|
|
|
|
2 |
|
||||
mn = ∑ mi |
|
|
+ JSi |
|
ωi |
, |
(20) |
||||||||
|
|
|
|||||||||||||
i=1 |
|
|
|
V |
|
|
|
|
ω |
n |
|
|
|||
|
|
|
n |
|
|
|
|
||||||||
n |
|
|
|
VSi |
2 |
|
|
|
2 |
|
|||||
Jn = ∑ mi |
|
+ JSi |
ωi |
, |
(21) |
||||||||||
|
|||||||||||||||
i=1 |
|
|
|
ω |
n |
|
ω |
n |
|
|
|||||
|
|
|
|
|
|
|
|
||||||||
В общем случае mn и Jn |
являются величинами переменными и все- |
||||||||||||||
гда положительными. В механизмах с постоянным передаточным отношением (зубчатые механизмы) приведенный момент инерции постоянен:
n |
|
ω |
2 |
n |
(22) |
Jn = ∑JSi |
|
i |
=∑JSiU12n = const. |
||
i=1 |
|
ωn |
i=1 |
|
|
|
|
|
|
|
|
|
Следует отметить, что в уравнении (21) выражение |
|
VSi |
|
представ- |
||
|
||||||
|
ωn |
|
|
|||
ляет собой передаточную функцию скорости, а выражение |
|
ω |
|
переда- |
||
|
|
i |
||||
|
|
|
|
ωn |
|
|
точное отношение угловых скоростей звеньев.
Для определения приведенных сил и их моментов используется равенство:
n |
|
Nn = ∑Ni , |
(23) |
i=1
где Nn - мощность, развиваемая приведенной силой или приведенным моментом;
Ni - мощность, развиваемая силами или моментами, приложенными к звену i.
Мощность Nn можно представить как
Nn = FnVn = Mnωn , |
(24) |
где Fn -величина приведенной к точке звена приведения силы, которая может быть в частном случае либо приведенной движущей силой (F∂ )n или приведенной силой сопротивления
(Fc )n ;
Vn ,ωn -соответственно скорости точки и звена приведения;
Mn - приведенный момент, который может быть или приведенным моментом движущих сил (M∂ )n или приведенным моментом сил сопротивления (Mc )n .
51 |
Лектор Садовец В.Ю. |
Тогда величины приведенной силы и приведенного момента можно представить в следующем виде:
|
|
n |
|
|
|
Fn = |
∑Mi |
; |
|
(25) |
|
i=1 |
|
||||
|
Vn |
||||
|
|
|
|
|
|
|
|
n |
|
|
|
Mn = |
∑Mi |
|
|||
i=1 |
|
; |
(26) |
||
ωn |
|
||||
|
|
|
|
|
|
n
Сумму ∑Mi можно записать в следующем виде:
i=1
n |
M |
|
n |
|
n |
M ω |
|
∑ |
= |
FV cosϕ |
+ |
∑ |
(27) |
||
i |
|
∑ i i i |
|
i i , |
|||
i=1 |
|
|
i=1 |
|
i=1 |
|
|
где Fi и Mi -сила и момент, приложенные к звену i; Vi -скорость точки приложения силы Fi ;
ωi -угловая скорость звена i,
ϕi -угол, образованный силой Fi и вектором скорости Vi .
Подставив выражения из уравнения (27) в уравнения (25) и (26), получим:
n |
V cosϕ |
i |
n |
ω |
|
|
|
Fn = ∑Fi |
i |
+∑Mi |
|
i ; |
(28) |
||
Vn |
|
|
|||||
i=1 |
|
|
i=1 |
Vn |
|
||
n |
V cosϕ |
|
n |
ω |
i . |
(29) |
|
Mn = ∑Fi |
i |
|
i +∑Mi |
|
|||
i=1 |
ωn |
|
|
i=1 |
ωn |
|
|
Из уравнений (28) и (29) видно, что Fn и Mn зависят от отношения
скоростей, а скорости, как мы знаем из кинематики механизмов, зависят от положения их звеньев, то есть от обобщенной координаты.
Следует напомнить, что приведенную силу Fn можно найти и по методу Н.Е. Жуковского, используя теорему о жестком рычаге.
Основы регулирования хода машины, уравнение движения машины
52 |
Лектор Садовец В.Ю. |
Полным временем движения машины называется промежуток времени от момента начала движения до конца ее движения. Закон движения машины определяется законом движения начального звена.
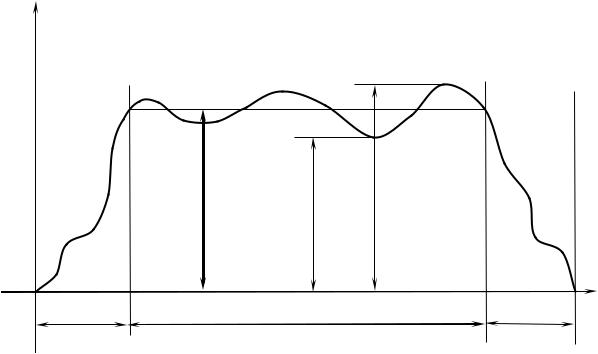
Процесс движения машины в общем случае состоит из трех фаз: разбега, установившегося режима и выбега (рис. 8.1).
Установившимся движением механизма (или машины) называется такое движение, при котором обобщенная скорость (производная обобщенной координаты по времени) есть периодическая функция времени. Период изменения обобщенной скорости как функции времени называется циклом установившегося движения [5].
ω
ωср |
ωmin |
ωmax |
Разбег |
Установившийся |
ре- |
Выбег |
|
жим |
|
|
Рисунок 11
При разбеге (пуске) машины работа движущих сил A∂ должна быть больше работы сил сопротивления AC .
Значит, момент движущих сил M∂ в период разгона должен превышать момент сопротивления MC , т.е. M∂ > Mc .Движение неустановившее-
ся, угловая скорость ω возрастает, кинетическая энергия Т увеличивается.
При установившемся режиме равенство кинетической энергии в начале и в конце периода A∂ = Ac , M∂ = Mc , ωср = const .
При выбеге (в режиме торможения машины) A∂ < Ac и M∂ < Mc , угловая скорость, и кинетическая энергия уменьшаются.
53 |
Лектор Садовец В.Ю. |
Уравнение движения машины записывается в виде уравнения кинетической энергии либо в интегральной, либо в дифференциальной форме. В интегральной форме уравнение движения для механизмов с одной степенью свободы имеет вид:
n |
n |
n |
|
∑Ai =∑Ti −∑Tio , |
(30) |
||
i=1 |
i=1 |
i=1 |
|
где п -число подвижных звеньев механизма;
Аi - работа внешних сил, действующих на звено i на конечном перемещении за рассмотренный промежуток времени;
Ti - кинетическая энергия звена i в конце рассматриваемого промежутка времени;
Ti0 - кинетическая энергия звена i в начале этого промежутка
времени.
Замена многозвенной машины одним звеном приведения правомерна при условии, что движение этого звена описывается уравнением, тождественным уравнению движения машины. В интегральной форме уравнение звена приведения (динамической модели механизма) имеет следующий вид:
ϕ |
J ω2 |
|
J ω2 |
|
|
||
∫Mndϕ = |
− |
, |
(31) |
||||
n n |
n |
0 |
|||||
2 |
2 |
|
|||||
ϕ0 |
|
|
|
|
|||
|
|
|
|
|
|
||
где ωn - угловая скорость звена приведения, совпадающая с угловой скоростью начального звена;
ω0 - значение угловой скорости ω при ϕ =ϕ0 .
Чтобы уравнения (30) и (31) были тождественными, необходимо выполнение следующих условий:
ϕ |
|
n |
|
∫Mndϕ = ∑Ai ; , |
(32) |
||
ϕ0 |
|
i=1 |
|
J ω2 |
n |
|
|
n |
n |
= ∑Ti ; , |
(33) |
2 |
|
||
|
i=1 |
|
|
J ω2 |
n |
|
|
n |
0 |
= ∑Ti0 . |
(34) |
2 |
|
||
|
i=1 |
|
|
Из уравнения (32) можно найти приведенный момент Mn , а из урав-
нения (33) - приведенный момент инерции.
В общем случае верхний предел интегрирования считается переменной величиной.