

§ 6.4. Частотный метод синтеза корректирующих устройств
Наиболее распространен частотный метод синтеза корректирующих устройств с помощью логарифмических частотных характеристик. Он проводится следующим образом. Строится желаемая логарифмическая амплитудная частотная характеристика, исходя из требуемой точности системы и требуемого качества переходного процесса. Эта желаемая характеристика сравнивается с той, которую данная система имеет без коррекции. Определяется передаточная функция корректирующего устройства так, чтобы при его включении в систему, в последней получилась бы желаемая форма логарифмической амплитудной характеристики. Затем строится фазовая частотная характеристика и оценивается получающаяся при этом величина запаса устойчивости системы и другие качественные показатели.
Рассмотрим формирование желаемой логарифмической амплитудной частотной характеристики, исходя из заданных требований к системе по точности и качеству переходного процесса.
Требования точности системы.
Они формулируются по-разному.
1. Пусть даны «рабочие» частота ωр и амплитуда ap, т. е. основные значения частоты и амплитуды задающего воздействия g(t), которые будут иметь место при работе данной системы; задана также допустимая ошибка Aε = εдоп (амплитуда ошибки).
Для области низких частот, где |W( jω)| >> 1 можно записать
![]()
Следовательно, аналогично формуле (3.24) здесь можно записать
2.
Пусть даны требуемые характеристики
задающего воздействия:
![]() и
и
![]() ,
а также εдоп
.
,
а также εдоп
.
Для использования частотных характеристик полагаем
![]()
где
индексом р
обозначены «рабочие» амплитуды и
частота, при которых будут иметь
место заданные скорость
![]() и
ускорение
и
ускорение
![]() .
.
Тогда, пользуясь формулами (3.23), вычисляем
![]()
Заметим, что если g(t) является угловой величиной, то обычно пользуются следующими обозначениями:
![]()
Тогда вычисляются
![]()
и желаемое значение |W(jωp)| — по формуле (6.17).
3.
Пусть в астатической системе требуется
обеспечить слежение за сигналом g
=
![]()
Имеем выражения
![]()
Коэффициенты ошибок
![]()
Установившаяся ошибка представляется в виде
![]()
или в других обозначениях
![]()
Отсюда находим желаемое значение
![]()
По этим данным, отражающим требования точности системы, строим низкочастотную часть желаемой логарифмической амплитудной частотной характеристики, как показано на рис. 6.15.
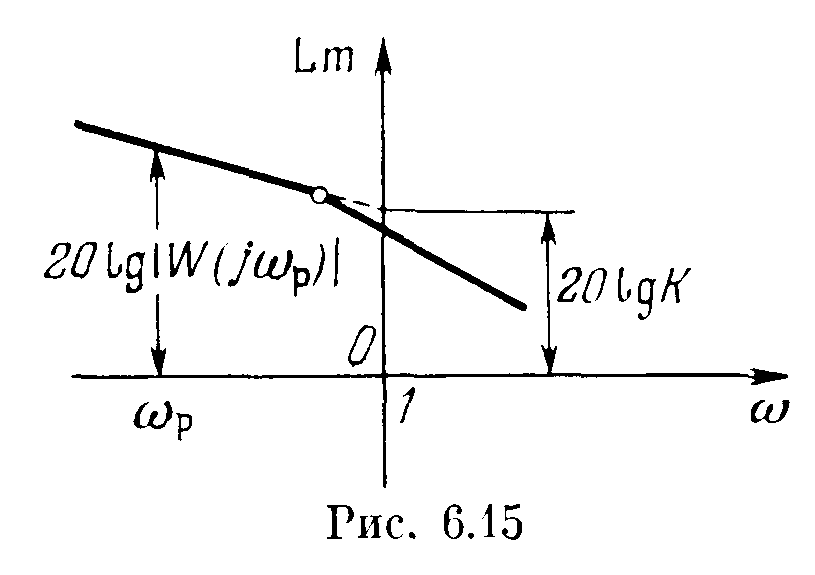
Начальный наклон характеристики —20 дБ/дек (астатизм 1-го порядка). Точка излома и дальнейший наклон пока еще не определены.
Требования качества переходного процесса.
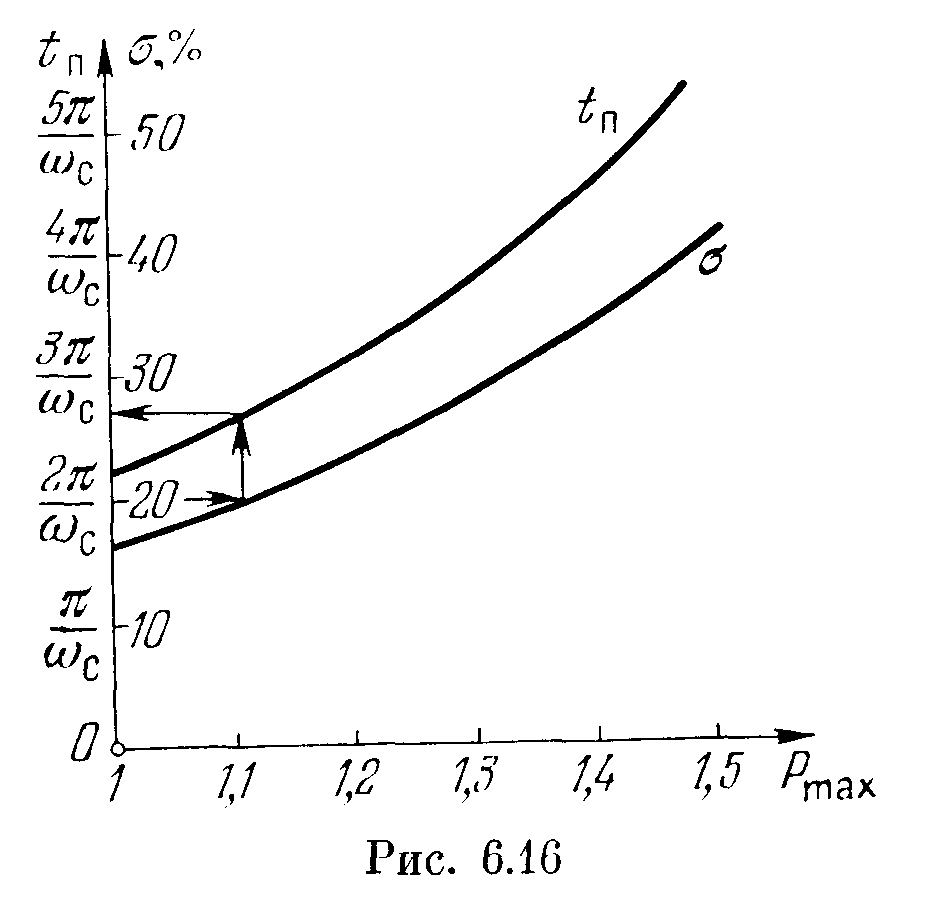
Пусть заданы допустимое перерегулирование σ и время затухания переходного процесса tп.
Воспользуемся графиком рис. 6.16, взятым из § 5.2.
По этому графику, отложив заданную величину σ (например, 20%), определяем величину tп (как показано стрелками на рис. 6.16), например
![]()
Но поскольку желаемое значение tп нам задано, то можно вычислить необходимую частоту среза
![]()
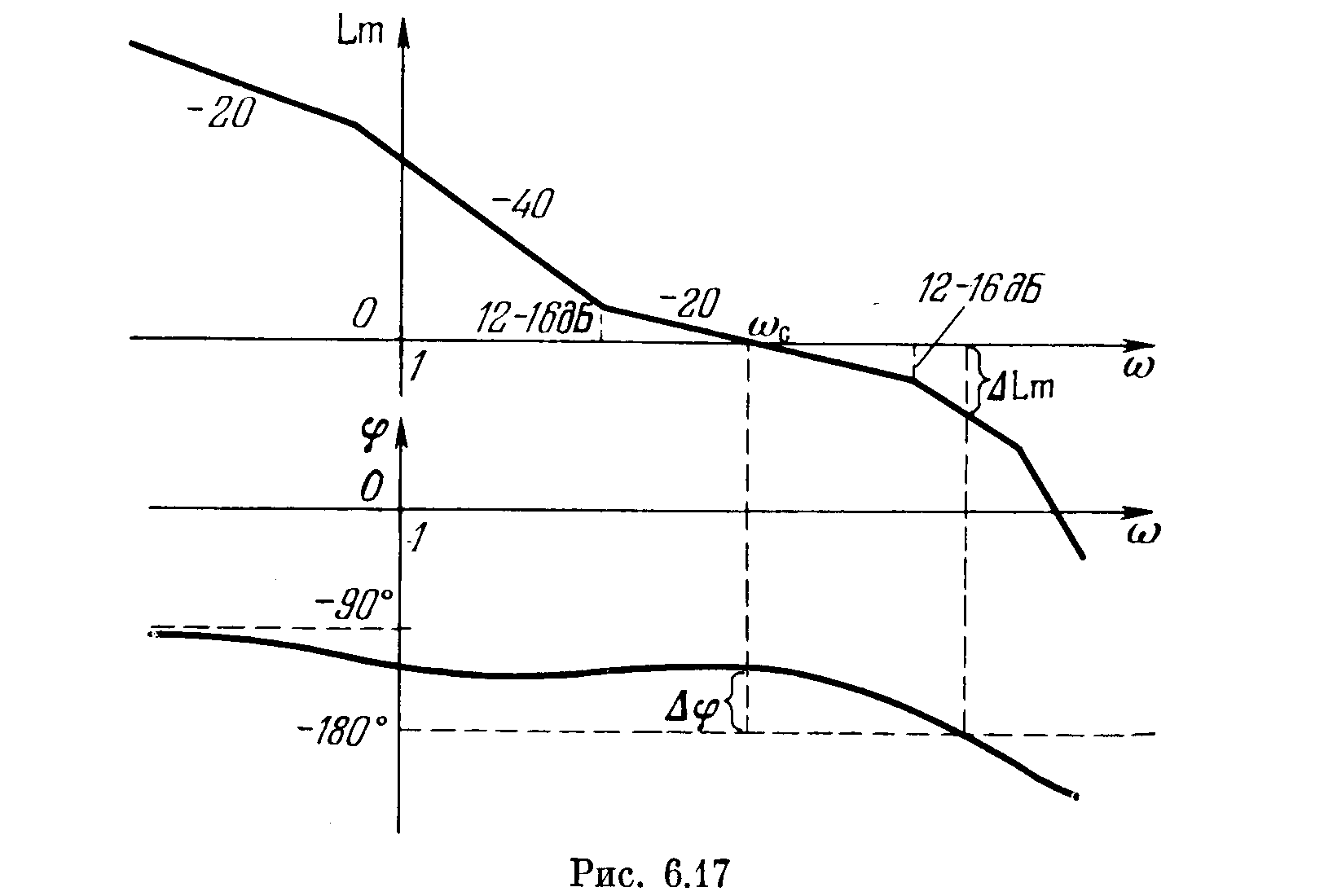
Наносим найденное значение ωс на график искомой желаемой ЛАХ (рис. 6.17) и проводим через точку ωс прямую с наклоном —20 дБ/дек. Это рекомендуется (см. § 5.2) для обеспечения хорошего качества переходного процесса.
Затем из предыдущего расчета берем низкочастотную часть характеристики и указанные части характеристики сопрягаем наклонной прямой с наклоном
—40
или —60 дБ/дек (рис. 6.17), как удобнее.
Высокочастотная часть заметной роли не играет. Поэтому ее берем такой, какая в данной системе имеется. Проверяем наличие необходимого запаса устойчивости по амплитуде ΔLm и по фазе Δφ (рис. 6.17).
Рассмотрим сначала синтез последовательного корректирующего устройства, а затем параллельного.
Задана передаточная функция разомкнутой цепи системы без коррекции W0(s) (рис. 6.18). Соответствующая ей частотная характеристика отличается от желаемой. Введем последовательное корректирующее устройство с искомой передаточной функцией kпП(s) (рис. 6.18).
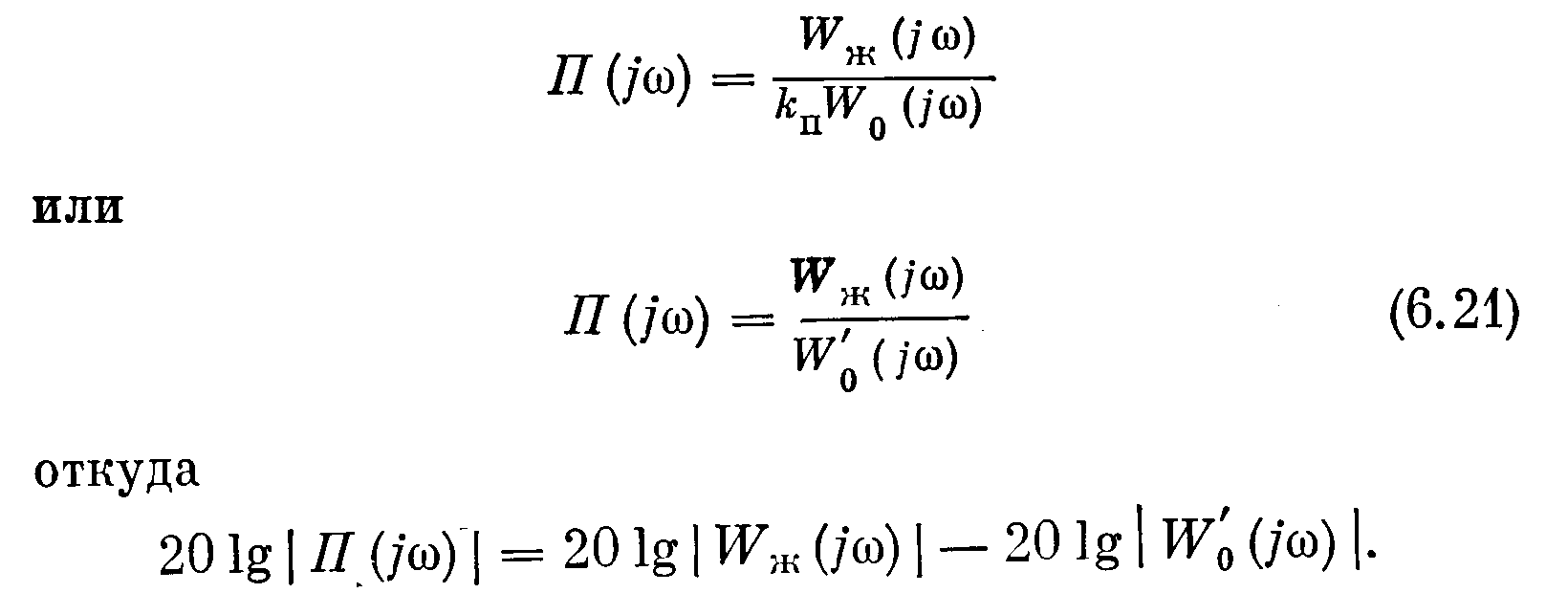
Согласно описанной выше методике, строим желаемую логарифмическую амплитудную частотную характеристику (рис. 6.17). Пусть коэффициент усиления желаемой системы Kж. отличается от имеющегося К0. Тогда нужно поднять характеристику W0(jω) (рис. 6.19) так, чтобы на ней получился желаемый коэффициент усиления. Получаем новую характеристику
![]()
Расстояние между w0` и W0 по вертикали в логарифмическом масштабе и дает нам искомую величину
20 1gkп , т. е. искомый коэффициент усиления корректирующего устройства
![]()
Теперь надо найти передаточную функцию корректирующего устройства П(s). Для этого совмещаем на один
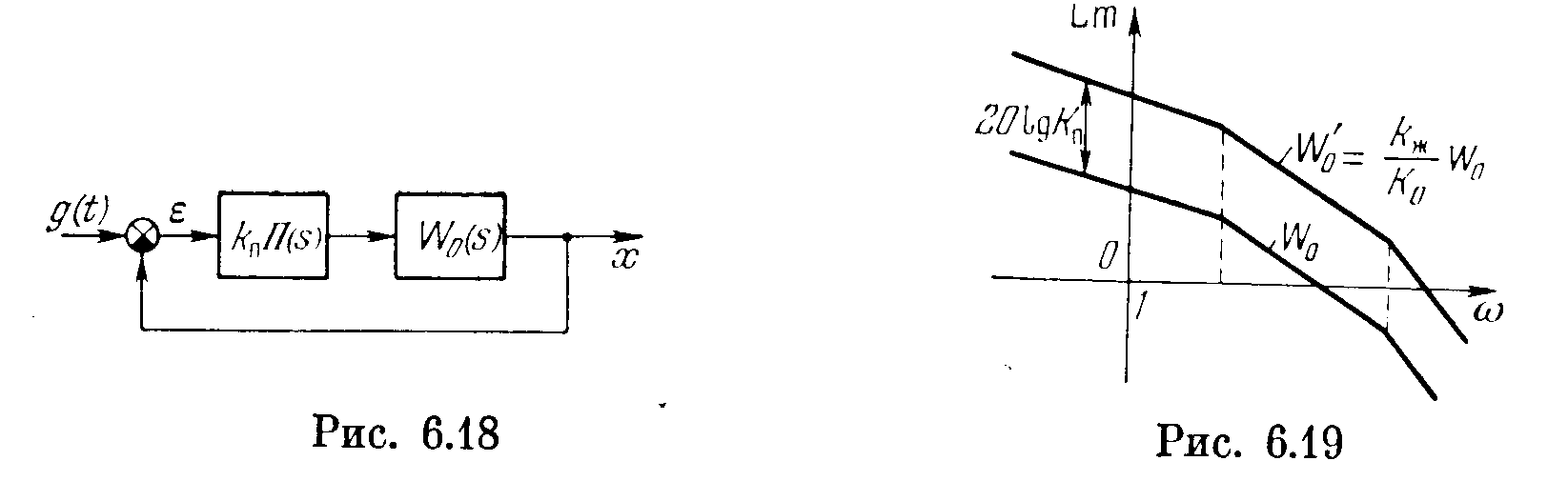
график логарифмические амплитудные частотные характеристики для Wж и W0`. Они отличаются на участке от точки 1/T1 до точки 1/Т4 (рис. 6.20).
Поскольку требуется
![]()
то можно записать (после подстановки s = jω) следующее:
Следовательно, чтобы найти характеристику Lm(ω) для П(s), нужно вычесть характеристику Lm(ω) для

w0` из Wж . Результат вычитания показан штрих пунктирной линией на рис. 6.20. Отсюда очевидна искомая передаточная функция последовательного корректирующего устройства
![]()
В заключение нужно построить фазовую характеристику φ(ω) для Wж и оценить запасы устойчивости (рис. 6.20).
По найденной передаточной функции можно составить электрическую схему корректирующего устройства (см., например, [45]).
Перейдем к синтезу параллельного корректирующего устройства в виде дополнительной обратной связи.
Задана передаточная функция разомкнутой цепи W0(s). Требуется ввести корректирующую обратную связь Z(s) так, чтобы система в целом (рис. 6.21) обладала желаемой частотной характеристикой.
П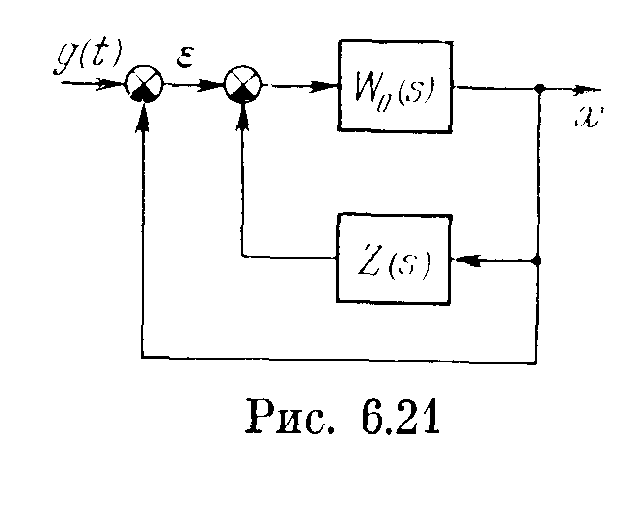 ередаточная
функция разомкнутой цепи с коррекцией
равна
ередаточная
функция разомкнутой цепи с коррекцией
равна
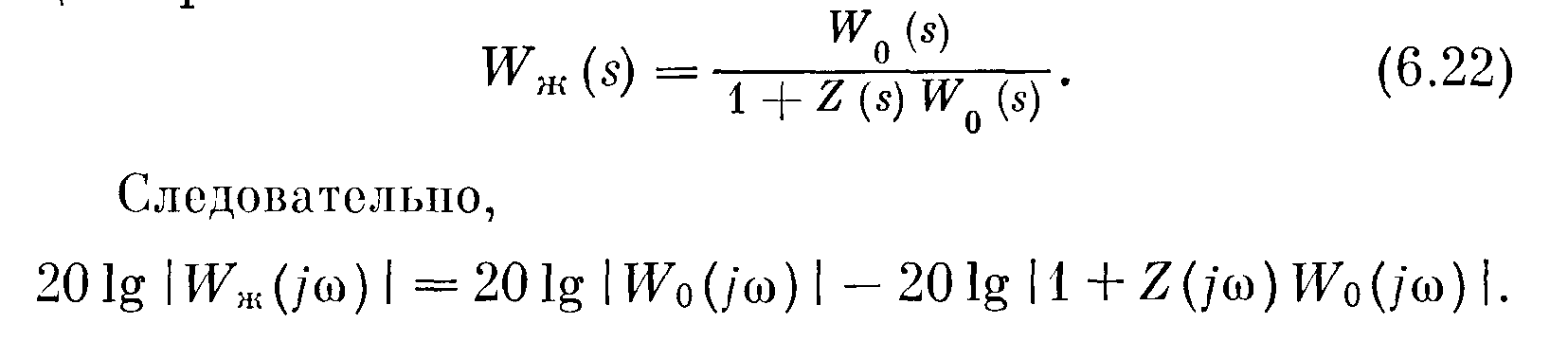
Чтобы избавиться от суммы под знаком логарифма, запишем приближенно

Построим заданную логарифмическую характеристику W0 с желаемым коэффициентом усиления и желаемую характеристику Wж (рис. 6.22).
В качестве искомой характеристики 1/Z примем характеристику, обозначенную на рис. 6.22 точечным пунктиром и совпадающую в средней части с Wж. Вычтем 1/Z из характеристики W0. Получим
![]()
Этот результат показан на рис. 6.22 штрих пунктирной линией. Из графика видно, что на участке CD характеристика |ZW0| > 1, а до точки С и после точки D характеристика |ZW0|<1, так как ось абсцисс соответствует значению амплитуды, равному 1 (20 1gA = 0).
Следовательно, при принятом очертании искомой характеристики 1/Z удовлетворяются написанные выше приближенные равенства (6.23).
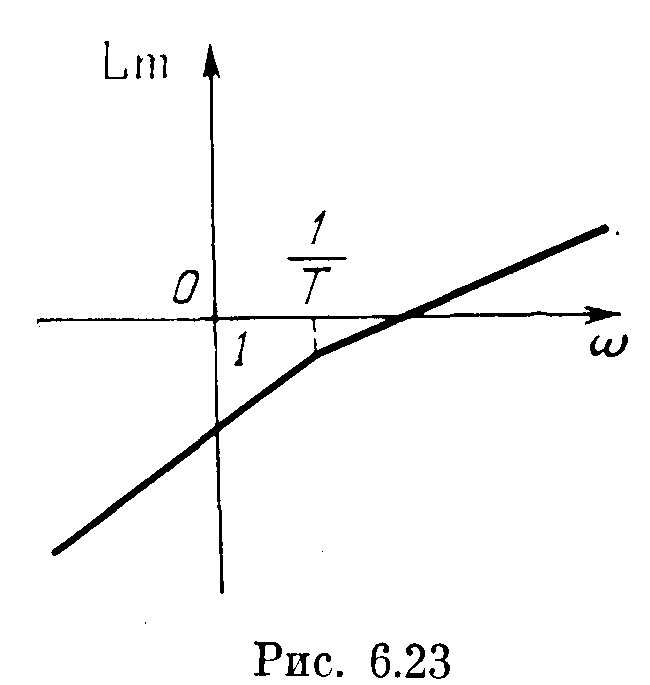
Таким образом, найдено параллельное корректирующее устройство в виде обратной связи, которое создает для системы в целом близкую к желаемой частотную характеристику. Согласно рис. 6.22 логарифмическая характеристика Z получит вид, представленный на рис. 6.23, что соответствует следующей передаточной функции искомой корректирующей обратной связи:
![]()
Это есть инерционная гибкая обратная связь с двойным дифференцированием (т. е. обратная связь по угловому ускорению исполнительного привода следящей системы).

В заключение, ввиду использования здесь приближенных равенств, необходимо уточнить получившуюся фактически характеристику
![]()
оцепить ее близость к желаемой, а затем изобразить фазовую характеристику φ(ω) (рис. 6.22) и оценить запасы
устойчивости и качество процессов, которые будут иметь место фактически.
Поскольку данное построение требует соблюдения «минимально-фазовости» системы, то надо проверить также устойчивость внутреннего контура системы (рис. 6.21) с передаточной функцией
![]()
Амплитудная частотная характеристика для него имеется на рис. 6.22. Нужно только построить фазовую частотную характеристику φвн(ω) и убедиться в соблюдении частотного критерия устойчивости. Существует развитие этого метода применительно к синтезу совместно вводимых корректирующих устройств (последовательного и параллельного). Разработаны также и иные варианты частотных методов синтеза.