


Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
II. Plate Elements
Kirchhoff Plate Elements:
4-Node Quadrilateral Element
z 
 y
y
Mid surface |
4 |
3 |
|
|
x
|
|
1 |
|
|
|
t |
|
|
|
|
2 |
|
|
|
w1 |
|
∂w |
∂w |
|
|
|
|
|
|
∂w |
|
∂w |
||
|
|
|
|
|
||||||||||
, |
|
, |
|
|
|
|
|
w2 , |
|
|
, |
|
||
|
|
∂x 1 |
∂y |
1 |
|
|
|
|
|
|
∂x 2 |
|
∂y 2 |
|
DOF at each node: |
|
|
w, |
∂w |
, |
|
∂w |
. |
|
|
||||
|
∂y |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
∂y |
|
|
|||
On each element, the deflection w(x,y) is represented by
4 |
|
|
∂w |
|
|
∂w |
|
|
|
w(x, y) = ∑ Ni wi |
+ N xi ( |
|
)i |
+ N yi ( |
|
)i |
, |
||
∂x |
∂y |
||||||||
i =1 |
|
|
|
|
|
|
|||
where Ni, Nxi and Nyi are shape functions. This is an incompatible element! The stiffness matrix is still of the form
k = ∫BT EBdV ,
V
where B is the strain-displacement matrix, and E the stressstrain matrix.
© 1997-2002 Yijun Liu, University of Cincinnati |
129 |
Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
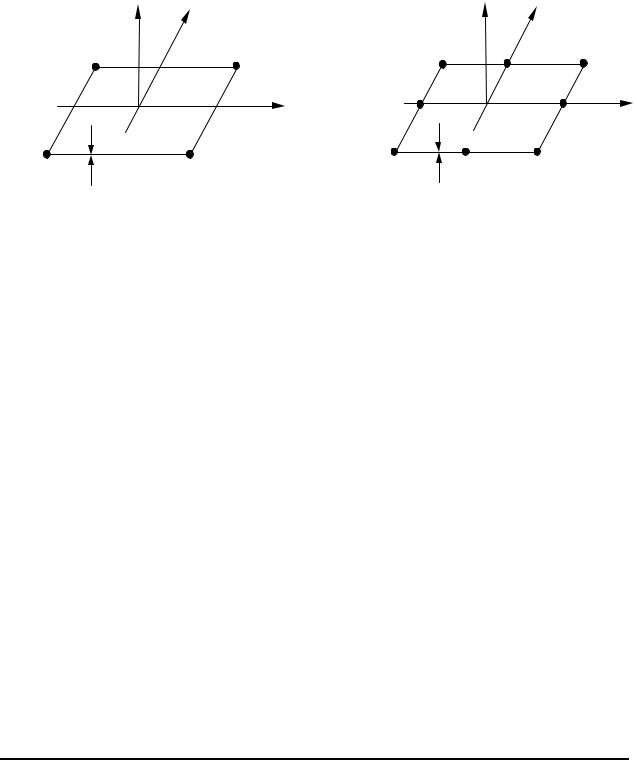
Mindlin Plate Elements:
4-Node Quadrilateral |
8-Node Quadrilateral |
||||
z |
y |
|
|
z |
y |
4 |
3 |
|
4 |
7 |
3 |
|
|
|
|
|
|
|
x |
|
8 |
|
6 |
|
|
|
|
x |
|
1 |
2 |
1 |
t |
5 |
2 |
t |
|
|
|
||
DOF at each node: |
w, θx and θy. |
On each element: |
|
n |
|
w(x, y) = ∑Ni wi , |
|
i=1 |
|
n
θx (x, y) = ∑Niθxi ,
i=1
n
θy (x, y) = ∑Niθyi .
i=1
•Three independent fields.
•Deflection w(x,y) is linear for Q4, and quadratic for Q8.
© 1997-2002 Yijun Liu, University of Cincinnati |
130 |
Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
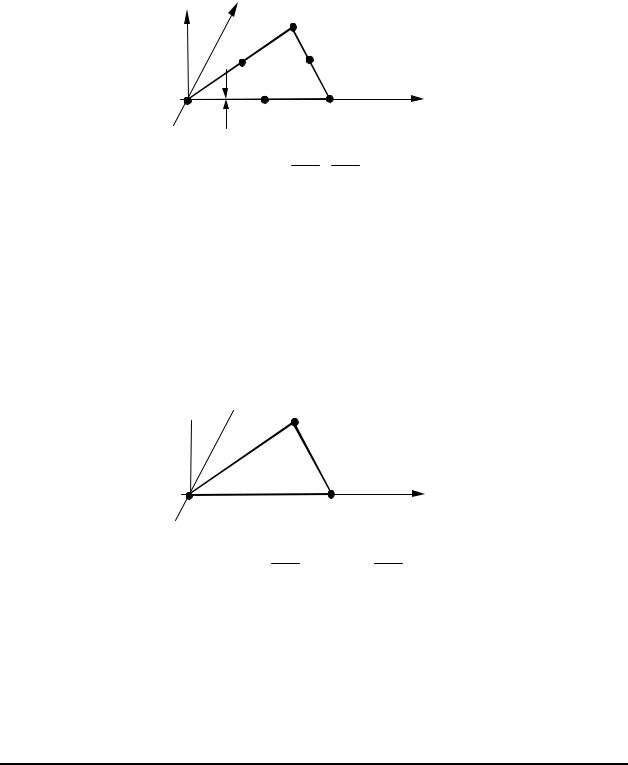
Discrete Kirchhoff Element:
Triangular plate element (not available in ANSYS). Start with a 6-node triangular element,
z |
y |
3 |
|
4 |
|
6 |
|
1 |
5 |
2 |
x |
t |
|
DOF at corner nodes: w,∂∂wx ,∂∂wy ,θx ,θy ;
DOF at mid side nodes: θx ,θy .
Total DOF = 21.
Then, impose conditions γ xz = γ yz = 0, etc., at selected nodes to reduce the DOF (using relations in (15)). Obtain:
z 
 y 3
y 3
1 |
2 |
x |
|
|
At each node: w,θx = ∂∂wx ,θy = ∂∂wy .
Total DOF = 9 (DKT Element).
•Incompatible w(x,y); convergence is faster (w is cubic along each edge) and it is efficient.
© 1997-2002 Yijun Liu, University of Cincinnati |
131 |