

Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
III. Shells and Shell Elements
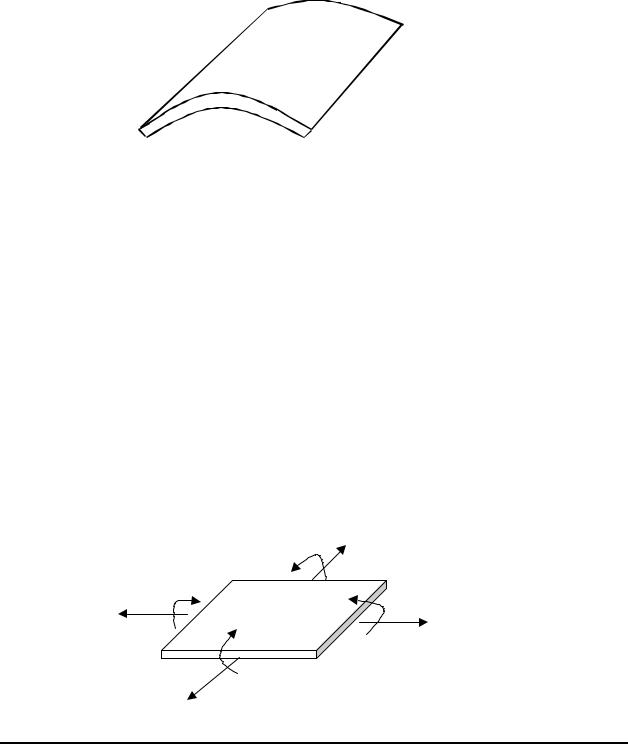
Shells – Thin structures witch span over curved surfaces.
Example:
•Sea shell, egg shell (the wonder of the nature);
•Containers, pipes, tanks;
•Car bodies;
•Roofs, buildings (the Superdome), etc.
Forces in shells:
Membrane forces + Bending Moments
(cf. plates: bending only)
© 1997-2002 Yijun Liu, University of Cincinnati |
133 |

Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
Example: A Cylindrical Container.
p |
p |
internal forces:
p |
p |
|
membrane stresses dominate
Shell Theory:
•Thin shell theory
•Thick shell theory
Shell theories are the most complicated ones to formulate and analyze in mechanics (Russian’s contributions).
•Engineering ≠ Craftsmanship
•Demand strong analytical skill
© 1997-2002 Yijun Liu, University of Cincinnati |
134 |
Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
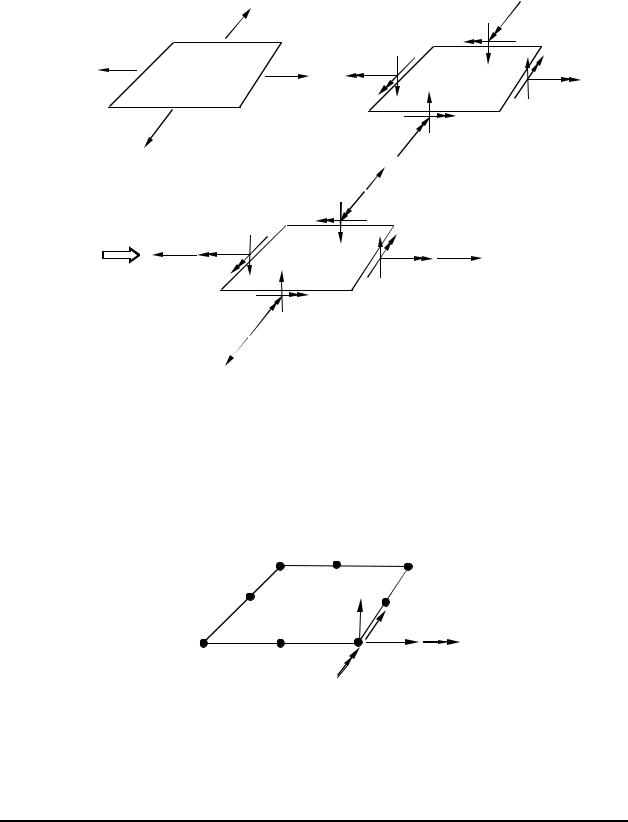
Shell Elements:
|
+ |
plane stress element |
plate bending element |
flat shell element
cf.: bar + simple beam element => general beam element. DOF at each node:
w |
v |
|
|
|
|
θy |
u |
θx |
|
|
Q4 or Q8 shell element.
© 1997-2002 Yijun Liu, University of Cincinnati |
135 |
Lecture Notes: Introduction to Finite Element Method |
Chapter 5. Plate and Shell Elements |
Curved shell elements:
i |
w |
θz |
|
v |
|
||
|
|
||
|
|
|
|
|
i |
u |
θx |
|
θy |
|
|
•Based on shell theories;
•Most general shell elements (flat shell and plate elements are subsets);
•Complicated in formulation.
© 1997-2002 Yijun Liu, University of Cincinnati |
136 |