

ТАУ методичка
.pdfЗадание7
1.Передаточная функция системы в разомкнутом состоянии имеет вид:
К p |
( p) = |
50(1 |
+0,15 p) |
, определить первые три коэффициента |
2 |
+0,02 p) |
|||
|
|
p (1 |
|
ошибки, а также добротность по скорости.
2. |
Построить АЧХ, определить показатель колебательности, часто- |
|||||||
|
ту среза и полосу пропускания, если передаточная функция ра- |
|||||||
|
зомкнутой системы имеет вид: К p ( p) = |
|
10(1 +0,1p) |
. |
||||
|
|
|
||||||
|
|
|
|
|
|
p(1 + p)(1 +0,01p) |
||
3. |
Передаточная |
функция разомкнутой |
следящей системы |
|||||
|
К ( p) = |
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
p(1 +0,02 p)(1 +0,1p) , определить первые три коэффи- |
||||||
|
циента ошибки и добротность по скорости. |
|||||||
4. |
Передаточная функция разомкнутой системы |
|||||||
|
|
k(1 +T1 p) |
|
|
||||
|
К p ( p) = |
|
, |
|
|
|||
|
(1 +T p)(1 +T 2 p2 ) |
|
|
|||||
|
|
2 |
3 |
|
|
|
|
|
определить первые два коэффициента ошибки.
5.Построить АЧХ и определить показатель колебательности, частоту среза и полосу пропускания, если передаточная функция
разомкнутой системы имеет вид: К |
|
( p) = |
100(1 +0,173 p) |
. |
p |
|
|||
|
|
p2 (1 +0,035 p) |
||
6.Передаточная функция системы в разомкнутом состоянии имеет вид:
1000 |
, определить первые два коэффициента |
|||
К p ( p) = |
|
|||
p(1 +0,03 p) |
||||
ошибки. |
|
|
|
|
7. Передаточная функция разомкнутой системы К p ( p) = |
1000 |
, |
||
|
||||
|
|
|
p(1 +Tp) |
|
определить первые два коэффициента ошибки.
8.Построить АЧХ и определить показатель колебательности, частоту среза и полосу пропускания для системы, передаточная характеристика которой К p ( p) = 200 .
p(1 +0,5 p)(1 +0,05 p)
9. Передаточная функция разомкнутой системы
81

К
(1 +T1 p)(1 +T2 p) , определить первые три коэффициента ошибки.
10. |
Построить АЧХ и определить показатель колебательности, часто- |
|||||||||||||||||
|
ту среза и полосу пропускания для разомкнутой системы с коэф- |
|||||||||||||||||
|
фициентом передачи К |
|
( p) = |
10(1 +0,5 p) |
. |
|
||||||||||||
|
p |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
p2 (1 +0,05 p) |
|||||||||
11. |
Передаточная функция разомкнутой системы |
|||||||||||||||||
|
|
К p ( p) = |
1000 |
|
|
|
, |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
p(1 +0,05 p) |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
определить первые два коэффициента ошибки. |
|||||||||||||||||
12. |
Передаточная функция разомкнутой системы |
|||||||||||||||||
|
|
К p ( p) = |
|
|
|
|
К |
|
|
|
|
|
, |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
p(1 +T |
2 |
p |
2 |
) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
определить первые три коэффициента ошибки. |
|||||||||||||||||
13. |
Построить АЧХ и определить показатель колебательности, часто- |
|||||||||||||||||
|
ту среза и полосу пропускания для разомкнутой системы с пере- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
150(1 +0,06 p) |
||||||||
|
даточной функцией К p ( p) = |
|
. |
|||||||||||||||
|
p(1 +0,4 p)(1 +0,03 p) |
|||||||||||||||||
14. |
Передаточная функция системы в разомкнутом состоянии име- |
|||||||||||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ет вид К p ( p) = |
|
|
, определить первые два коэффици- |
||||||||||||||
|
p(1 +0,56 p) |
|||||||||||||||||
|
ента ошибки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15. |
Передаточная функция системы в разомкнутом состоянии име- |
|||||||||||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ет вид К p ( p) = |
|
|
, определить первые два коэффици- |
||||||||||||||
|
p(1 +0,56 p) |
|||||||||||||||||
ента ошибки.
16.Передаточная функция системы в разомкнутом состоянии
К p |
( p) = |
k(1 +T1 p) |
, |
||
p(1 |
+T p) |
||||
|
|
|
|||
|
|
|
2 |
|
|
определить первые три коэффициента ошибки.
17. Передаточная функция системы в разомкнутом состоянии
=100(1 +0,05 p)
К p ( p) p(1 +0,005 p) ,определить первые три коэффициента ошибки.
82
18. Передаточная функция разомкнутой следящей системы
К p ( p) = + 50 + , определить первые три коэф- p(1 0,02 p)(1 0,003 p)
фициента ошибки, а также добротность по скорости.
19. Построить АЧХ и определить показатель колебательности, частоту среза и полосу пропускания для разомкнутой системы с пере-
= 1000(1 +0,05 p)
даточной функцией К p ( p) p(1 +0,4 p)(1 +0,015 p) .
20.Передаточная функция разомкнутой следящей системы
=100
Кp ( p) p(1 +0,01p)(1 +0,005 p) , определить первые три коэф-
|
фициента ошибки, а также добротность по скорости. |
|
|
|
|
||||
21. |
Построить АЧХ и определить показатель колебательности, часто- |
||||||||
|
ту среза и полосу пропускания для разомкнутой системы с пере- |
||||||||
|
даточной функцией К p ( p) = |
400(1 +0,1p) |
|
. |
|
|
|
|
|
|
p(1 + p)(1 +0,013 p) |
|
|
|
|
||||
|
|
|
|
|
|
|
|||
22. |
Построить АЧХ и определить показатель колебательности, часто- |
||||||||
|
ту среза и полосу пропускания для разомкнутой системы с пере- |
||||||||
|
даточной функцией К p ( p) = |
350(22 +0,2 p) |
|
|
|
|
|
||
|
p( p +5)(12 +0,02 p) |
|
|
|
|
||||
|
|
|
|
|
|
||||
23. |
Передаточная функция разомкнутой системы К p |
( p) = |
k(1 +T1 p) |
, |
|||||
p(1 +T p) |
|||||||||
|
|
|
|
|
|
||||
|
|
|
|
|
2 |
|
|
||
|
определить первые два коэффициента ошибки в общем виде. |
|
|||||||
24. |
Передаточная функция разомкнутой системы К p ( p) = |
К1 +К 2 |
|
, |
|||||
p(1 +Tp) |
|||||||||
|
|
|
|
|
|
|
|||
определить первые два коэффициента ошибки в общем виде.
25.Построить АЧХ и определить показатель колебательности, часто-
ту среза и полосу пропускания для разомкнутой системы с передаточной функцией К p ( p) = 50(1 +0,3 p) .2
p (1 +0,04 p)
83
Задание8
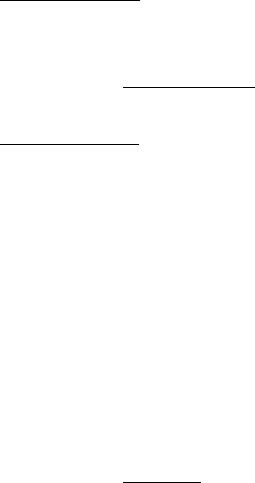
Задана следящая система. Входная величина – угол поворота задающей оси. Выходная величина – угол поворота оси отработки (рис.1).
|
ПМ |
|
|
|
|
+ |
|
ку |
|
Р α2 |
ПВ |
|
|
|
|
|
|
u |
u |
u УПТ u1 |
ИД |
|
ОР |
− |
|
|
|
αн |
|
α |
α2 |
|
|
|
|
Обратная связь |
|
|
|
||
1 |
|
|
|
|
Рис.1
В системе использованы:
–элемент сравнения-потенциометрический мост (ПМ): α = α1 – α2, потенциометрический датчик u = K2α, K1 = в/град = 57,3 в/град;
–усилитель постоянного тока (УПТ):
u1(1 + Typ) = K2u; K2 = 105; Ty = 0,005 c;
– исполнительный двигатель (ИД) при Мн = 0:
α |
|
p(1 +T |
|
p) = K |
|
u ;K |
|
=50 |
рад |
;T |
|
= 0,02 c |
|
|
|
|
|
|
|||||||
|
u |
|
дв |
|
3 |
1 |
3 |
|
в с |
дв |
|
|
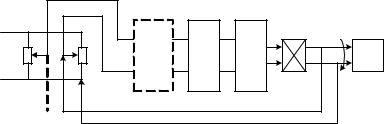
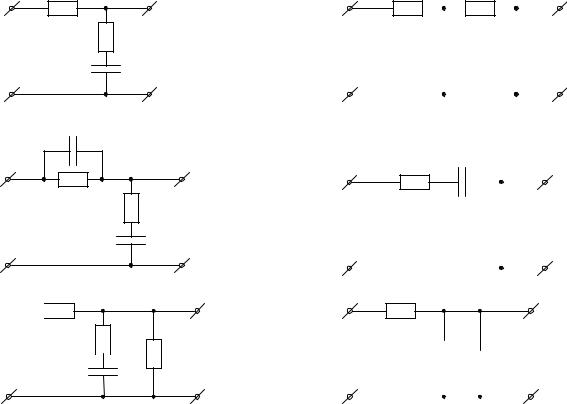
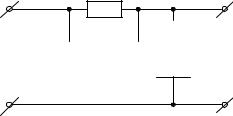
– редуктор: α2 = К4 · αn; K4 = 10–3. Задан вариант корректирующей цепи
Найти передаточную функцию разомкнутой системы, ее ККУ, построить ЛАЧХ и ЛФЧХ (в масштабе на миллиметровке), определить устойчивость замкнутой системы.
Найти передаточную функцию корректирующей цепи, ее ККУ. Выбрать значения Кк, Т1к, Т2к такими, чтобы достичь устойчиво-
сти системы.
Выполнить краткий анализ полученных характеристик. Сделать вывод об устойчивости и качестве регулирования скорректированной системы авторегулирования.
84

85
1) 
|
|
R2 |
С2 |
|
|
|
|
||||||
Uвх |
|
|
|
|
|
|
U |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
R3 |
|
|
|
C1 |
|
|
R1 |
вых |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С
3) |
|
|
|
R2 |
Uвых |
Uвх |
|
|
|
R1 |
|
|
|
5)
Uвх |
C1 |
|
|
С2 |
|
|
Uвых |
||
|
|
|
|
||||||
R2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
R1 |
||
|
|
|
|
|
|
|
|
|
|
2)
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 |
|
|
|
|
|||
Uвх |
|
|
|
|
|
|
|
R2 Uвых |
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
C1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C
4)
|
R3 |
R2 |
||||
Uвх |
R1 |
|
|
Uвых |
||
|
|
|
|
|||
|
|
|
|
|
|
|
6) |
R2 |
С2 |
|
Uвх |
|
C1 |
Uвых |
|
R1 |

86
7)
|
С2 |
R1 |
|
|
|
Uвых |
||
Uвх |
C1 |
|
|
|
|
|||
|
|
|
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R3
9)
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвх |
С2 |
|
|
|
C1 |
|
|
Uвых |
||||
|
|
|
|
|||||||||
|
R2 |
|
|
|
|
R1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
11)
R3 |
С2 |
|
C1 |
|
Uвых |
|
|
||||
Uвх |
|
|
|
|
R2 R3
8)
С2 |
R2 |
|
|
|
|
|
R1 |
|
|
|
Uвых |
||
Uвх |
|
|
|
|||
|
|
|
|
|
|
|
C1
10)
C1
Uвх Uвых
R1
12)
|
|
R1 |
||||
Uвх |
C1 |
|
|
Uвых |
||
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
87
13)
Uвх
15)
Uвх
17)

Uвх
R2 R1
Uвых
C1
С2
R2
R1
Uвых
C1
R3
R2 |
|
Uвых |
R1
C1
14)
|
|
R2 |
|
|
|
R1 |
|
|
|
|
||
Uвх |
С2 |
|
|
|
C1 |
|
|
Uвых |
||||
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
16)
|
|
R1 |
|
|
|
|
|
|
|
|
С2 |
|
|
|
|||
Uвх |
|
|
Uвых |
|||||
|
|
C1 |
|
|
||||
|
|
|
||||||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
18)
|
|
R2 |
|
|
|
|
|
|
|
Uвх |
R1 |
|
|
|
|
|
Uвых |
||
|
|
|
|
|
|||||
|
|
C1 |
|
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|

88
|
|
|
|
|
С2 |
|
|
R2 |
|
|
|
19) |
|
|
|
20) |
|
R3 |
С2 |
|
|
R3 |
R1 |
|
R1 |
|
|
||
Uвх |
|
Uвых |
|
|
|
|
|
Uвх |
Uвых |
||
|
|
|
|
||
|
|
C1 |
|
R2 |
C1 |
|
|
|
|
21) |
R3 |
R2 |
|
22) |
|
|
|
|
|
R4 |
|
|
|
R2 |
|
С2 |
|
||
Uвх |
|
U |
вых |
U |
вх |
|
R3 |
U |
|
С2 |
C1 |
|
|
|
C1 |
вых |
|||
R1 |
|
|
|
|
R1 |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
C1 |
|
|
|
23) |
|
|
|
24) |
|
|
|
|
|
|
R2 |
|
|
|
|
|
R1 |
|
|
|
С2 |
R1 |
|
|
|
|
|
|
С2 |
Uвх |
|
|
|
|
|
|
R2 |
||
|
U |
|
Uвх |
|
|
|
Uвых |
||
|
|
вых |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
C1
R1
25)
|
|
|
|
|
|
|
|
|
C1 |
Uвх |
|
R2 |
|
|
|
|
Uвых |
||
С2
89
ЛИТЕРАТУРА
1.Бесекерский В. А., Попов Е. П. Теория систем автоматического управления-СПб. : Профессия, 2007. – 747 с.
2.Сборник задач по теории автоматического регулирования и управления. – / под редакцией Бесекерского В. А. 4-е изд., стереот. – М. : ФИЗМАЛИТ, 1972. – 588 с.