

Судомеханический факультет
Кафедра судовой электроавтоматики
КУРСОВОЙ ПРОЕКТ
по дисциплине "Теория автоматического управления"
на тему:
“Настройка системы автоматического регулирования судовым турбонасосом как ОР частоты вращения ”
Специальность "Эксплуатация судового электрооборудования и средств автоматики"
Выполнил: курсант уч.гр.
Марчук
Проверил: преподаватель
Кузнецов Е.В.
Новороссийск 2015
Содержание проекта
1. Краткое описание САУ функциональная схема…………………………………….4
2. Определение характеристик объекта управления…………………………………11
3. Вывод уравнений и передаточных функций САУ…………………………………20
4. Выбор настроечных параметров САУ………………………………………………..27
1. Краткое описание САУ функциональная схема.
1.1 Объект регулирования
Объектом регулирования является центробежный турбонасос.
Центробежный насос, который приводится от паровой турбины, перекачивает жидкость из входной емкости в выходную емкость.
В него подается пар Pb, который вращает турбину и жидкости начинаются перекачиватьсяMts. Регулируемая величина- частота вращенияRpТехнические данные насоса приведены в таблице 8.1.
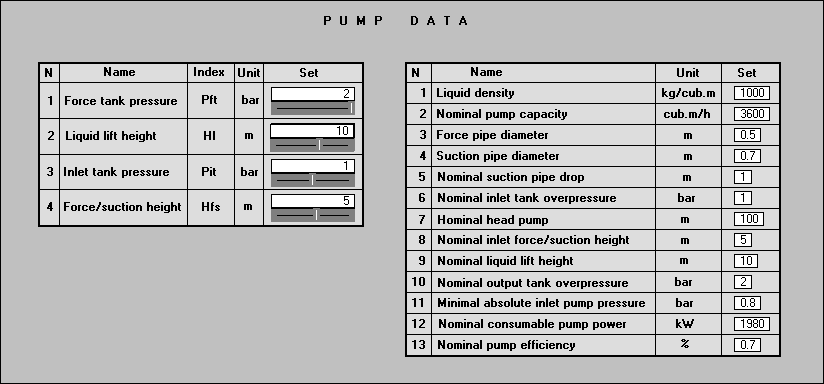
Таблица 1.1
Технические данные цетробежного насоса
Состояние цетробежного насоса. 1.2.
Таблица 1.2
Характеристика цетробежного насоса.
|
Общее наименование величины |
Наименование величины подогревателя |
Обозначение в тексте |
Обозначение на рис. 8.1 |
|
Регулируемая величина |
Частота вращения насоса |
Rp 1 |
Rp 2 |
|
Регулирующее воздействие |
Давление пара на турбину |
Pb1 |
Pb2 |
|
Нагрузка |
Перекачиваемые жидкости |
Gf |
Gl |
Наглядное представление о насосе, как ОР дает его динамическая схема, общий вид которой показан на рис. 1.2.
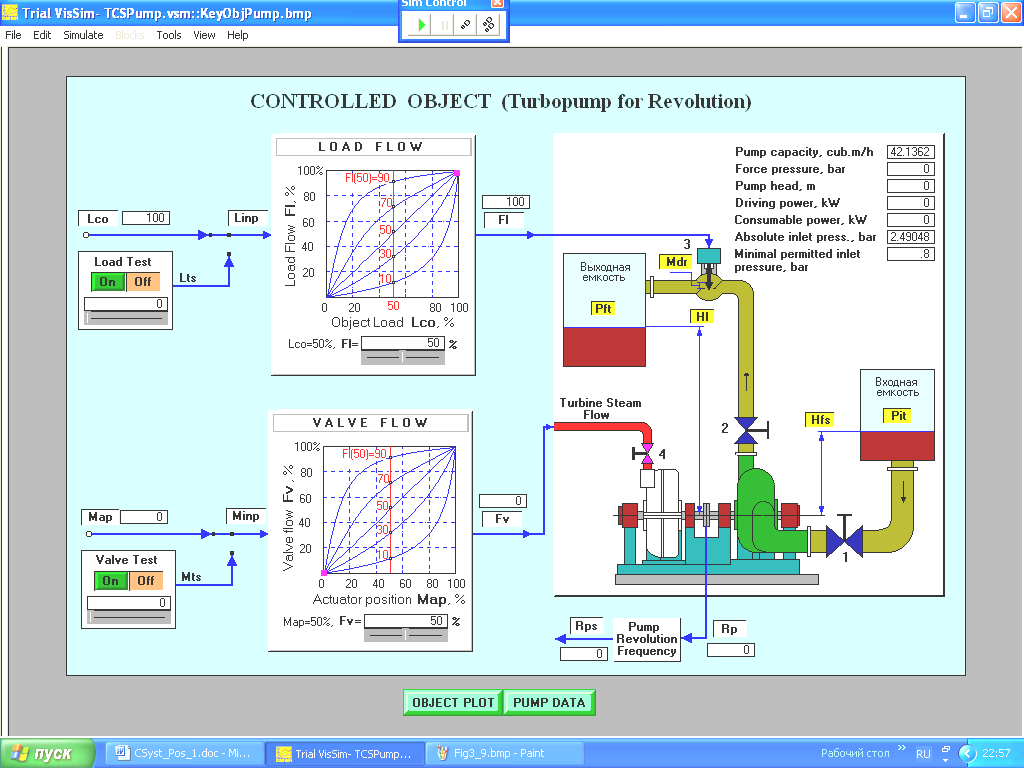
Рис. 1.1 Панель цетробежного насоса
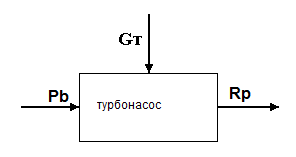
Рис. 1.2 Динамическая схема цетробежного насоса
2 Назначение системы автоматического регулирования частоты вращения цетробежного насоса
Данная система регулирования предназначена для перекачки жидкостей, с допустимым отклонением от заданного значения.
Особенности системы регулирования:
- комбинированный принцип регулирования: по нагрузке ОР и отклонению,
- последовательного корректирующее устройство,
- контур позиционирования (следящая система управления исполнительным механизмом),
- релейный усилитель с зонами нечувствительности и возврата,
- постоянная скорость перемещения исполнительного механизма,
- погрешность поддержания частоты вращения вследствие зоны нечувстви- тельности в усилителе.
1.2 Описание регулятора
Функциональная схема системы автоматического регулирования частоты вращения приведена на рис. 1.3.

Рис. 1.3 Функциональная схема системы автоматического регулирования частоты вращения насоса
ДЧВ -датчик регулируемой величины, выходной сигнал которогоRbсоответствует действительному значению регу- лируемой величиныRb2; ЭС1- элемент сравнения, формирующий сигналеRотклонения регулируе- мой величины от заданного значения (еR= Rт2з-Rд);КУО-последовательное корректирующее устройство по отклонению, пред- назначенное для обеспечения требуемого качества работы САР (до- пустимого изменения регулируемой величины);
ДН -датчик (нагрузки ОР), выходной сигнал которогоGтд соответствует фактическому расходуGт;
КУН - корректирующее устройство по нагрузке ; С- сумматор, формирующий сигнал заданного положения ИММзкак сумму выходных сигналов КУН и КУО (Мз=Мзн+Мзо); ЭС2- элемент сравнения, формирующий сигнал отклонения положения ИМ от заданного (eM=Мз-Мд);
КУП -последовательное корректирующее устройство позиционирования, предназначенное для обеспечения требуемого качества перемеще- ния ИМ путем формирования ПИД закона регулирования; У-усилитель, который повышает мощность входного сигналаUкупдо уровняUу, необходимого для перемещения ИМ (и регулирующего органа регулятора) с требуемой скоростью; ЭД- электродвигатель, частота вращения которогоFэдопределяется вы- ходным сигналом усилителяUу; РД- понижающий редуктор, преобразующий частоту вращения ЭДFэдв меха- ническое перемещениеМ;
ДП - датчик положения исполнительного механизма, выходной сигнал ко- торого Мдсоответствует фактическому положению ИММ; РО-паровой регулирующий клапан, связанный механической передачей с РД и преобразующий перемещениеМ в непосредственное регулирую- щее воздействие на ОР(расход параPп).