

3 Настройка сар алгоритмическим методом
Система автоматического регулирования частоты вращения турбонасоса должна иметь показатели, значения которых приведены в таблице 3.1
Таблица 3.1
Предельные показатели качества системы автоматического регулирования частоты вращения.
|
Наименованиерегулируемой величины. |
Показатели переходных процессов |
Статич. ошибка,% | |||
|
|
вид |
Максим.динамич. отклонение dRp, % |
время процесса, с | ||
|
Частота вращения турбонасоса. |
апериодический |
10 |
20 |
4 | |
Настройка САР состоит в определении значений настроечных параметров последовательного корректирующего устройства КУО, при которых показатели переходных процессов в системе должны удовлетворять нормам, приведенным в таблице 3.1.
Настроечными параметрами КУО с ПИД законом регулирования, передаточная функция которого приведена в подразделе 1.3 служат: - коэффициент пропорциональности kpm, - время интегрирования Tim, - время дифференцированияTdm.
Поскольку регулятор с ПИД законом регулирования является астатическим (не имеет статической ошибки), то требования по статической ошибке выполняются гарантированно при любых значениях настроечных параметров.
При настройке используются максимальные и минимальные значения настроечных параметров КУО, приведенные в таблице 3.2[1].
Таблица 3.2
Минимальные и максимальные значения настроечных параметров КУО
|
Наименование параметра |
Обозначение |
Численные значения | |
|
миним.-ные |
максим-ные | ||
|
Коэффициент пропорциональности |
kpm |
1,0 |
- |
|
Время интегрирования, с |
Tim |
- |
1000 |
|
Время дифференцирования, с |
Tdm |
0 |
1000 |
3.1 Предварительная настройка алгоритмическим методом
Алгоритмический метод заключается в поочередном подборе значений настроечных параметров КУО при изменениях нагрузки объекта регулирования на 10%-15%..
Настройка данным методом САР частоты вращения производится следующим образом:
1 Устанавливается очередное значение одного из настроечных параметров (kpm, Tim, Tdm).
2 Задается начальная нагрузка ОР (количество жидкости Gco=50%) вся САР выводится на установившийся режим при данной нагрузке ОР.
3 Нагрузка ОР уменьшается на выбранную величину dGco=15% и регистрируется изменение регулируемой величины (частота вращения Rb) до выхода САР на новый установившийся режим.
4 Задается начальная нагрузка ОР Gco и регистрируется изменение частота вращения Rb до выхода САР на исходный установившийся режим.
5 Оцениваются показатели переходных процессов по регулируемой
величине Rb.
6 По результатам оценки выполняется одно из следующих действий: - продолжение настройки данного параметра (переход к п.1), - переход к настройке следующего параметра (переход к п.1), - окончание настройки.
Алгоритм настройки (на каждом из последующих этапов выполняются перечисленные выше операции):
1 Настройка коэффициента пропорциональностиkpm.
1.1 Задаются начальные значения параметров КУО:
- минимальный коэффициент пропорциональности kpm =1 согласно таблице 3.2; - отключается интегрирование (кнопкой) и дифференцирование (задается Tdm =0).
Таким образом, КУО становится пропорциональным.
Графики переходных процессов в САР для данного варианта настройки приведены на рис. 3.1.
Поскольку переходный процесс по частоте вращенияимеет монотонный вид (максимальное динамическое отклонение dRb=0) необходимо увеличивать коэффициент пропорциональности.
1.2 При kpm=5 переходный процесс по Rb имеет апериодический вид с небольшим максимальным динамическим отклонением dRbm=0,4. Поэтому настройку коэффициента пропорциональности можно предварительно считать законченной.

Рис. 3.1Переходные процессы при настройке kpm:
На установившихся режимах при различных нагрузках САР регулируемая величина Rb принимает различные значения. Следовательно, КУО с П законом регулирования является статической (имеет статическую ошибку).
2 Настройка времени дифференцирования Tdm.
2.1 Задаются начальные значения параметров КУО:
- коэффициент пропорциональности kpm=5, - время дифференцирования Tdm=0,2 с
Таким образом, КУО становится пропорционально-интегрально- дифференциальным.
Графики переходных процессов в САР для данного варианта настройки приведены на рис. 3,2
Из этих графиков следует, что включение дифференцирования при Tdm=0,2 с сглаживает колебательность переходных процессов.

Рис. 3,2 Переходные процессы при настройкеTdm:
ПИД закон, Tdm-расчетное.
С целью усиления положительного эффекта дифференцирования были получены переходные процессы при Tdm=0,5 с, показанные на рис. 3,3 Из графиков следует, что такое увеличение практически устраняет колебательность переходного процесса.

Рис. 3,3 Переходные процессы при настройкеTdm: ПИД закон, Tdm=0,5 с.
Дальнейшее увеличение Tdm до 5 с, дает переходные процессы при уменьшении расхода топлива с 90% до 10% и система становится неустойчивой.Таким образом, в результате настройки принимаются следующие значения параметров КУО:
3 Настройка времени интегрированияTim.
3.1 Задаются начальные значения параметров КУО:
- коэффициент пропорциональности kpm =5,
- время дифференцирования Tdm=0,5 с - максимальное время интегрирования Tim =10 с согласно таблице 3.1; - подключается интегрирование (кнопкой),
Таким образом, КУО становится пропорционально-интегральным.
Графики переходных процессов в САР для данного варианта настройки приведены на рис. 3.4
Поскольку переходный процесс по частоте вращения имеет апериодический вид необходимо уменьшать время интегрирования.
3.2 При Tim=10 с переходный процесс по Rb, становится заметно колебательным. Поэтому настройку времени интегрирования можно считать законченной.
На установившихся режимах при различных нагрузках САР регулируемая величина Rb принимает одно и то же значение с погрешностью, определенной зоной нечувствительности усилителя. Следовательно, после включения интегрирования в КУО система регулирования стала астатической (без статической ошибки).
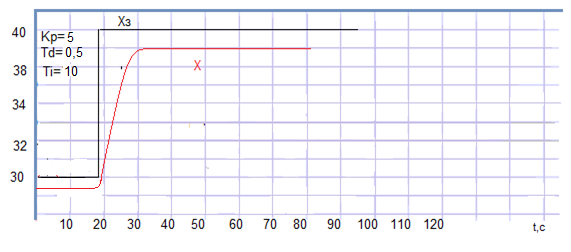
Рис. 3.4 Переходные процессы при настройкеTim:
- коэффициент пропорциональности kpm=5, - время интегрирования Tim =10 с, - время дифференцирования Tdm=0,5 с.
3.2 Проверка работы системы регулирования
Проверка полученных значений настроечных параметров КУО производилась по переходным процессам, вызванным возможно большим скачкообразным изменением нагрузки котла- количество жидкости Gco: - а) увеличение Gco максимальное. - б) увеличение Gco минимальное.
 Рис
3,5 Графики проверки следящей системы.
Рис
3,5 Графики проверки следящей системы.
Переходные процессы для значений настроечных параметров, определенных на этапе предварительной настройки, показаны на рис. 3.5 Для этих значений параметров максимальное динамическое отклонение объема жидкости было получено на режиме уменьшения нагрузки и составило dGb=9,9%, что не превышает предельно допустимую величину dGb=10%.
Следовательно, определенные на предыдущем этапе настроечные параметры не обеспечивают требуемое качество работы системы регулирования частота вращения турбонасоса
Таб 3,3Показатели переходных процессов при проверке САР
|
№№ п.п. |
Наименование величины |
Обозна-чение |
Варианты | |
|
1 |
2 | |||
|
1 |
Номинальное значение частоты вращения , об/мин |
Rb2н |
100 | |
|
2 |
Предельное максимальное динамическое отклонение уровня, % (табл. 3.1). |
dRb |
10 | |
|
3 |
Предельное максимальное динамическое от частоты вращения , об/мин |
dRbl |
10 | |
|
|
Настроечные параметры КУО | |||
|
4 |
Коэффициент пропорциональности. |
kpm |
5 |
5 |
|
5 |
Время интегрирования, с. |
Tim |
10 |
10 |
|
6 |
Время дифференцирования, с. |
Tdm |
0,2 |
0.5 |
|
7 |
Номер рисунка с графиками переходных процессов. |
|
3.3 |
3.4 |
|
|
Увеличение нагрузки | |||
|
8 |
Максим. динамическое от- клонение частоты вращения , об/мин |
dRb |
6.4 |
2.8 |
|
9 |
Допустимость отклонения. |
|
да |
да |
|
10 |
Время переходного процесса, с. |
Тп |
200 |
200 |
|
11 |
Вид переходного процесса. |
|
апери- дич. |
апери- дич. |
|
|
Уменьшение нагрузки | |||
|
12 |
Максим. динамическое от- клонение частоты вращения , об/мин |
dRm |
10.0 |
5.0 |
|
13 |
Допустимость отклонения |
|
да |
да |
|
14 |
Время переходного процесса, с. |
Tп |
90 |
90 |
|
15 |
Вид переходного процесса. |
|
апери- дич. |
апери- дич. |
З А К Л Ю Ч Е Н И Е
В результате выполнения курсовой работы можно сделать следующие выводы:
1 Составлено описание устройства и принципа действия системы автоматического регулирования частоты вращения турбонасоса.
2 Особенностью данной системы регулирования является:
- последовательное корректирующее устройство, - следящая система управления исполнительным механизмом.
3 Для обеспечения требуемого качества работы следящей системы в нее включено последовательное корректирующее устройство позиционирования с пропорционально-дифференциальным законом регулирования и определены настроечные параметры следящей системы.
4 Определены настроечные параметры корректирующего устройства системы регулирования.
5 Проверена работа САР частоты вращения турбонасоса и показано, что найденные значения настроечных параметров обеспечивают требуемое качество поддержания давления.