

2.2. Накопители на магнитных дисках
Накопители на магнитных дисках (НМД) пришли в вычислительную технику в конце 60 годов прошлого века и сразу завоевали ведущее положение в системах внешней памяти ЭВМ.
На практике используются три разновидности НМД:
Накопители на гибких магнитных дисках (Floppy Disk) – НГМД;
Накопители на жёстких несменяемых жёстких дисках – винчестерах – НЖМД;
Накопители на жёстких дисках со сменными пакетами дисков – НМД.
Указанные выше разновидности дисков принципиально схожи друг с другом как по структуре, так и по принципу действия. Поэтому принцип действия накопителя на дисках будем рассматривать на обобщённой структурной схеме накопителя. Схема накопителя приведена на рис.12. На кинематической схеме цифрами обозначены следующие узлы накопителя:
Пакет магнитных дисков который может содержать от одного до нескольких дисков;
Блок магнитных головок; количество головок соответствует количеству рабочих поверхностей пакета дисков;
Рычаги (плоские пружины), на которых размещены магнитные головки и которые механически соединяют блок головок с кареткой;
Каретка – узел накопителя, осуществляющий перемещение блока головок над поверхностью дисков;
Позиционер – устройство, перемещающее каретку и позиционирующее головки;
Контроллер накопителя, осуществляющий управление накопителем;
Тахометр, измеряющий скорость движения каретки;
Датчик-преобразователь перемещения головок в код;
Датчик скорости вращения шпиндельного двигателя;

Шпиндельный двигатель, вращающий пакет дисков с заданной скоростью;
Шток каретки, механически связывающий каретку и позиционер.
В реальных НМД на гибких, жёстких и сменных дисках отдельные детали приведённой на рисунке кинематической схемы могут отсутствовать или, по крайней мере, иметь другую конструкцию. Это ни в коей мере не изменяет принцип функционирования накопителя любого из приведённых выше разновидностей НМД. Однако конструктивное исполнение НМД приводит к существенной разнице параметров накопителя с системной точки зрения:
Скорость вращения дисков:
в НГМД – 250 – 500 об/мин;
в НМД типа винчестер – от 3600 до 15000 об/мин;
в НМД со сменными пакетами – такого же порядка.
Способ взаимодействия магнитной головки с диском:
в НГМД – контактный метод записи-чтения (головка
плотно прижата к диску)
в НМД других типов – бесконтактный метод записи-
считывания (зазор между головкой и диском).
Количество дисков в пакете:
в НГМД – всегда один диск;
в НМД других типов от 1 диска до 16.
Объём хранимых данных:
в НГМД – 1,44 Мбайт (2, 88 Мбайт);
в НМД других типов – сотни Мбайт – Гбайт.
Управление позиционированием магнитных головок в НМД любого типа осуществляется с помощью позиционеров под управлением контроллера накопителя. Позиционированием называется процесс перемещения магнитных головок над поверхностью диска с текущей позиции на заданную. Позиционером называется устройство, осуществляющее выработку сигналов для двигателей, непосредственно перемещающих каретку НМД.
Существуют два типа позиционеров, используемых в современных НМД:
Позиционеры на основе шаговых двигателей;
Позиционеры на основе линейных двигателей (звуковых катушек).
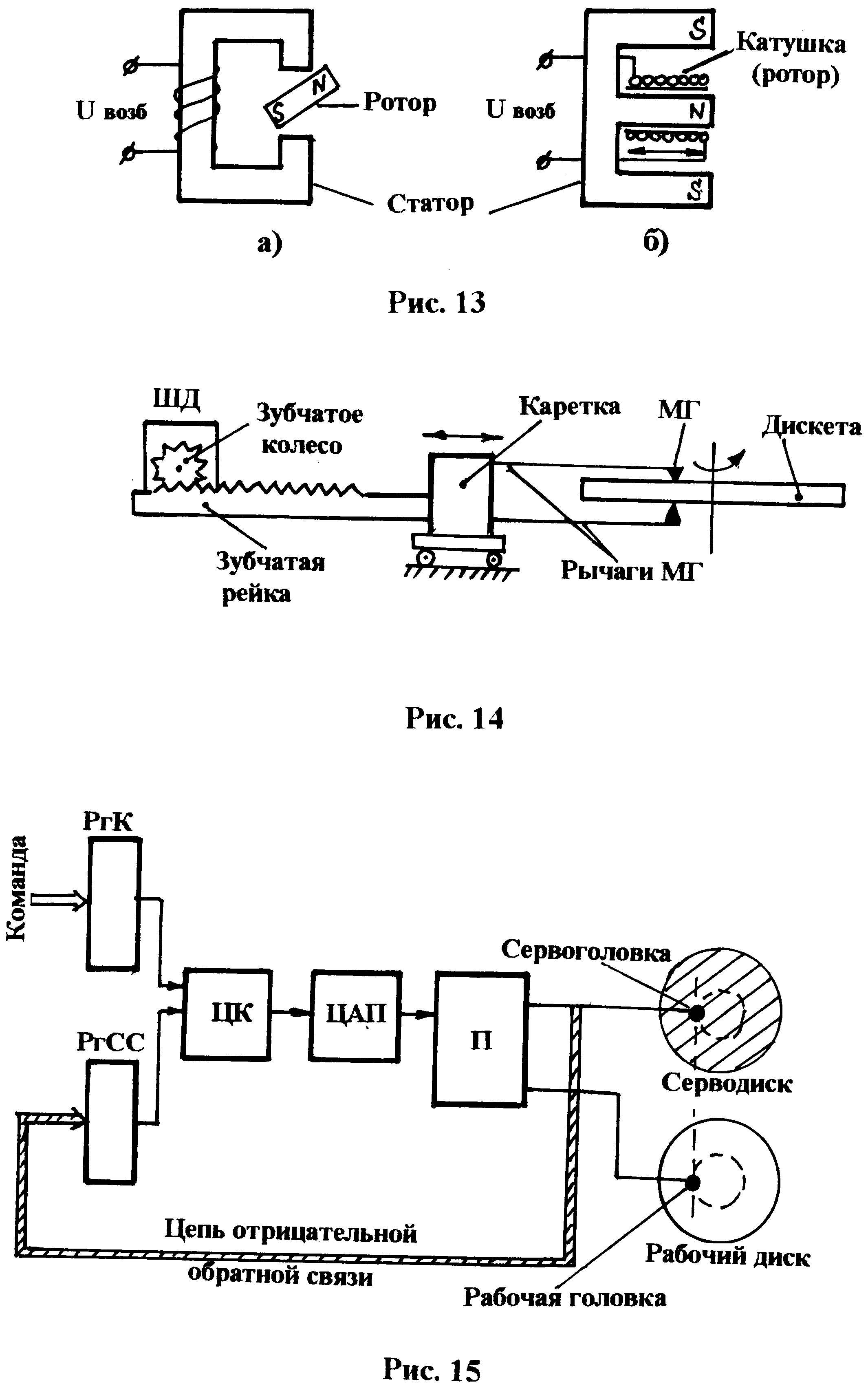
Шаговый двигатель представляет собой устройство, состоящее из магнитопровода П-образной формы, на который намотана обмотка (см.рис.13,а) На обмотку подаются электрические сигналы в виде прямоугольных импульсов различной полярности. П-образный магнитопровод представляет собой статор шагового двигателя. Ротор двигателя представляет собой постоянный магнит. При подаче положительного импульса в обмотку статора ротор делает поворот на элементарный угол – шаг. Два последовательно поданных импульса перемещают ротор на два шага. При смене полярности импульсов возбуждения (Uвозб.) ротор повернётся на количество шагов, определяемое числом импульсов, но в противоположном направлении. На рис.13,а приведён однофазный шаговый двигатель, на практике же используются двухфазные и трёхфазные двигатели, имеющие более совершенные характеристики (более точно отрабатывается элементарный угол поворота – шаг).
Идея линейного двигателя заимствована из звуковой системы динамика – громкоговорителя радиоприёмника или магнитофона, что послужило тому, что двигателю присвоили второе название – звуковая катушка. Схема «звуковой катушки» приведена на рис.13,б.
Е-образный постоянный магнит (статор двигателя) на N-полюсе имеет немагнитный подвижный цилиндр, на который нанесена обмотка возбуждения. При подаче возбуждающего напряжения (Uвозб) катушка выдвигается вправо на расстояние, пропорциональное величине возбуждающего напряжения. При смене полярности напряжения катушка движется в обратную сторону. Перемещения катушки осуществляются с большой скоростью и высокой точностью, что позволяет быстро и точно позиционировать магнитные головки.
Позиционеры на базе шаговых двигателей значительно дешевле, но медленнее и менее точны, что сделало возможным использовать их в накопителях на гибких дисках, в которых количество дорожек невелико (40 дорожек) и не требует высокой точности позиционирования. Схема позиционера на базе шагового двигателя приведена на рис.14 В этом позционере используется метод счисления пути, пройденного зубчатой рейкой, механически жёстко связанной с кареткой позиционера. Перемещение шагового двигателя на один шаг вправо или влево перемещает рейку на один зубчик и изменяет содержимое регистра, в котором хранится код, пропорциональный позиции головки на диске.
В позиционерах на базе линейного двигателя перемещение магнитной головки строится на основе сервосистем с отрицательной
обратной связью, что позволяет выводить головку на нужную дорожку (цилиндр) с высокой скоростью и точностью.
Введём понятие цилиндра и сервосистемы. Цилиндром называют совокупность магнитных дорожек с одинаковым номером и расположенных на различных поверхностях пакета магнитных дисков.
Севосистемой называют устройство, использующее специальные сигналы (сервосигналы), несущие информацию о том, где (на каком цилиндре) находится головка, сравнивает эту информацию с информацией о заданном (конечным) положением головки и вырабатывает сигнал разности ΔN = ±( N тек – Nзад), где N тек и N зад – текущий и заданный номера цилиндров, соответственно. Эта разность в виде электрического сигнала подаётся в сервосистему и служит для вывода головки на заданную позицию. Схема (упрощенная) сервосистемы приведена на рис. 15. Схема содержит следующие узлы:
РгК – регистр команды позиционера, содержащий данные о заданном номере цилиндра (N зад);
РгСС – регистр сервосистемы, содержащий данные о текущем номере цилиндра (N тек);
ЦК – цифровой компаратор, образующий код разности (∆N);
ЦАП – цифроаналоговый преобразователь, преобразующий цифровой код разности в напряжение, управляющее двигателем позиционера;
П – позиционер;
СД – серводиск, на котором записана сервоинформация;
РД – рабочие диски накопителя.