

Теоретическая механика
Теоретическая механика– это наука, изучающая математические методы расчёта механизмов и сооружений. Расчет ведется не самих реальных объектов, а их моделей. Применяютграфическийианалитическийметоды расчета.
Графический метод – основан на геометрических построениях.
Аналитический метод – основан на алгебраических расчетах.
Статика – это раздел теоретической механики, который изучает равновесие абсолютно твердых тел под действием сил.
Абсолютно твердое тело – это недеформируемое тело, в котором расстояние между любыми двумя точками всегда остается неизменным и никакие внешние воздействия не вызывают изменения его размеров и формы.
Лекция №1 основные понятия и аксиомы статики
1.1 Сила и система сил
Сила – это мера механического воздействия одного тела на другое. Сила измеряется в ньютонах (Н) и является векторной величиной, то есть характеризуется 1) численным значением (модулем);
2) точкой приложения;
3) направлением.
В графическом методе расчета силу изображают в виде вектора, в каком либо масштабе.
Пример1.1. Начертить вектор силы F = 30 кН в масштабе 1:5.
Р ешение.
Составляем пропорцию:
ешение.
Составляем пропорцию:
1см – 5 кН
х см –
30 кН . ![]()
Пример 1.2. Определить значение силы, если в масштабе 1:2 вектор имеет длину 3 см.
Р ешение:
составляем пропорцию:
ешение:
составляем пропорцию:
1см – 2 кН
4
см – х
кН . ![]()
Силы бывают внешними и внутренними.
Внешние силы представляют собой действие одного тела на другое и
делятся на активные и реактивные.
Активные силы – стремятся вызвать перемещение тела (сила G, рис. 1.1).
Реактивные силы (реакции) – стремятся противодействовать перемещению тела под действием активных сил (сила R, рис. 1.1).
В нутренние
силы - возникают
внутри тела под действием внешних сил.
нутренние
силы - возникают
внутри тела под действием внешних сил.
Система сил - совокупность нескольких сил, приложенных к телу.
Плоская система сил- линии действия сил лежат в одной плоскости.
Пространственная система сил- линии действия сил лежат в разных плоскостях.
С
Рис. 1.2
Эквивалентные системы сил – разные системы сил, которые оказывают одинаковое механическое действие на тело.
Равнодействующая сила- одна сила, эквивалентная данной системе сил.
Уравновешивающая сила - сила, равная по модулю данной силе и направленная по той же линии действия, но в противоположную сторону.
Уравновешенная система сил - система сил, приложенная к материальной точке под воздействием которой точка находится в состоянии покоя.
П равило
параллелограмма
- равнодействующая
(FΣ)
двух сил (F1
и F2),
приложенных к одной точке, является
диагональю параллелограмма, построенного
на данных силах/
Вместо правила
параллелограмма можно пользоваться
правилом треугольника.
равило
параллелограмма
- равнодействующая
(FΣ)
двух сил (F1
и F2),
приложенных к одной точке, является
диагональю параллелограмма, построенного
на данных силах/
Вместо правила
параллелограмма можно пользоваться
правилом треугольника.
F2= F12 + F22 + 2 F1 F2cos
1.3 Связи и их реакции
Связи- это тела, которые ограничивают движение рассматриваемого тела.
Реакции связей - силы, действующие на тело со стороны связей, которые противодействуют возможным движениям тела. Реакция связи всегда противоположна направлению, по которому возможно движение тела.
Принцип освобождения от связей - не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией.
Наиболее распространенные виды связей:
1) Связь в виде гладкой плоскости (рис. 1.3, а). Реакция связи (R) направлена перпендикулярно к опорной поверхности.
2) Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис. 1.3, б). Реакции гибких связей RA и RB направлены вдоль связей.
3) Связь в виде жесткого прямого стержня с шарнирным закреплением концов (рис 1.3, в). Здесь реакции R1 , R2 и R3 направлены вдоль осей стержней.
4) Связь, осуществляемая точечной опорой (рис. 1.3 г). Реакция связей R1, R2 R3, направлены перпендикулярно поверхности опирающегося тела.
а) б)
в)
г) 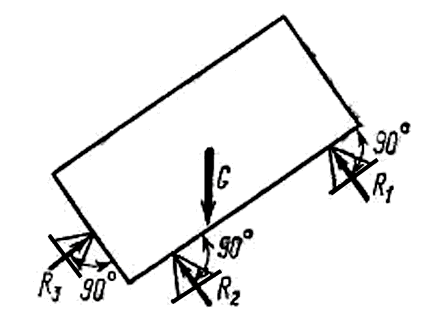
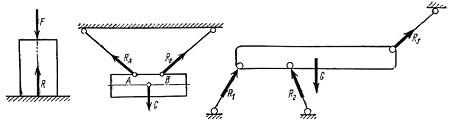
Рис. 1.3 Виды связей