

2. Исходные данные для моделирования сар
Динамические свойства САР описываются следующей системой уравнений:
 (1)
(1)
где,
 - угловая скорость;
- угловая скорость;
 -
мощность;
-
мощность;
 -
время;
-
время;
 (2)
(2)
где,
 - эдс
- эдс
 (3)
(3)
где,
 - сигнал рассогласования;
- сигнал рассогласования;
 -
задающее напряжение
-
задающее напряжение
 (4)
(4)
 (5)
(5)
Физический
смысл переменных, входящих в уравнение,
отражен в описании схемы САР. Параметры
 ,
, ,
, и
и
 ,
, ,
, ,
, ,
, - соответственно постоянные времени и
передаточные коэффициенты. Заданное
значение скорости
- соответственно постоянные времени и
передаточные коэффициенты. Заданное
значение скорости
 .
.
3. Описание сар и её функциональная схема
На электрических станциях при производстве электроэнергии предъявляются определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащаются САР угловой скорости. На рисунке 1 показана схема одного из вариантов такой САР.

Рисунок 1 - Схема САР угловой скорости рабочего колеса гидротурбины: 1 – гидротурбина; 2 – генератор; 3 – заслонка; 4 – тахогенератор; 5 – усилитель; 6 – электродвигатель; 7 – редуктор
В данной системе объектом регулирования является гидротурбина, регулируемая величина которого - угловая скорость ω. Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т.е. от мощности, которая потребляется от генератора (с увеличением мощности угловая скорость снижается, а с уменьшением - возрастает). Таким образом, мощность ρ является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости имеется заслонка, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения х заслонки. Следовательно, перемещение заслонки х можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора, ЭДС Е которого сравнивается с задающим напряжением и0. Сигнал рассогласования ∆U через усилитель управляет посредством электродвигателя и редуктора заслонкой.

Рисунок 2 – Функциональная схема САР: ЗО – задающий орган; РО – регулирующий орган; ИМ – исполнительный механизм; ВО – воспринимающий орган; ОР – объект регулирования; УО – усилительный орган
4. Передаточные функции объекта, элементов сар и её структурная схема


по управлению:

 (6)
(6)

по возмущению:

 (7)
(7)


 (8)
(8)



 (9)
(9)




 (10)
(10)

На основании найденных передаточных функций элементов построим структурную схему системы автоматического регулирования угловой скорости гидротурбины.
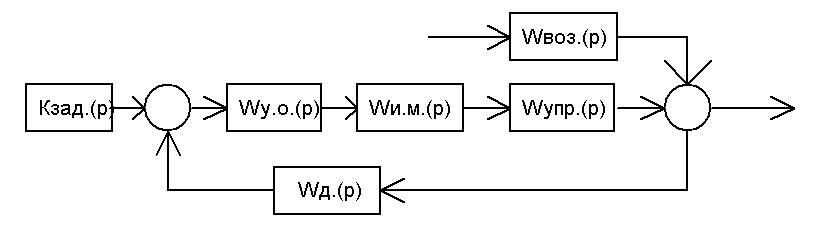
Рисунок 3 - Структурная схема САР
5. Определение параметров заданного типового закона регулирования
гидротурбина автоматический управление
При оценки качества процесса регулирования, необходимо исходить из следующих требований:

Статическая
ошибка

Время
регулирования

Перерегулирование

Количество
перерегулирование

6. Моделирование исходного варианта сар
Моделирование системы автоматического регулирования угловой скорости гидротурбины выполняется в среде программного комплекса (ПК «МВТУ»), в которой используется метод структурного моделирования, базирующийся на математических моделях в виде структурных схем.
В первую очередь необходимо на основе структурной схемы исходной системы, составить структурную схему моделирования, заменяя звенья системы, соответствующим блоком из общетехнической библиотеке ПК «МВТУ».
Для формирования задающего воздействия используется блок «константа», а для создания возмущающего воздействия используют блок «ступенчатое воздействие.

Рисунок 4 - Структурная схема моделирования система автоматического регулирования угловой скорости гидротурбины в среде ПК «МВТУ»
Параметры
передаточных функций исходной структурной
схемы:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

 ;
;
 ;
;

Руководствуясь методикой подготовки исходных, выбирается метод и задаются параметры интегрирования:
- Метод интегрирования «Рунге – Кутта классический 45»;
-
Исходя из наибольшей постоянной времени
 ,
принимается первоначальное время
интегрирования 15;
,
принимается первоначальное время
интегрирования 15;
-
Исходя из наименьшей постоянной времени
 ,
принимается первоначальное значение
шага интегрирования: максимально
0,0002с; минимально 0,00002с;
,
принимается первоначальное значение
шага интегрирования: максимально
0,0002с; минимально 0,00002с;
- Число точек выдачи данных 20000;
- Точность интегрирования 0,001с;
В результате моделирования САР, в соответствии с данными таблицы получен график переходного процесса.
Таблица 1 - Значение параметров блоков структурной схемы
|
Блок |
Параметр |
Значение |
|
1 |
Задающий сигнал |
|
|
2 |
Отрицательная обратная связь |
|
|
3 |
Коэффициент усиления |
|
|
4 |
Коэффициент усиления |
|
|
Постоянная времени |
|
|
|
Коэффициент демпфирирования |
|
|
|
Начальные условия Y(0),Y’(0) |
|
|
|
5 |
Коэффициент усиления |
|
|
Постоянная времени |
|
|
|
Вектор начальных условий |
|
|
|
6 |
Отрицательная обратная связь |
|
|
7 |
Время, YO,YK |
|
|
8 |
Коэффициент усиления |
|
|
Постоянная времени |
|
|
|
Вектор начальных условий |
|
|
|
9 |
Коэффициент усиления |
|
Размещено на Allbest.ru