

метода АА
.pdf
|
xj |
− x |
|
|
|
i |
|
|
|
(e) |
|
(e) |
|
u (x)≈ |
ui + |
|
x − x |
u j |
= Niui + |
N ju j = N |
u |
, |
|||||
xj |
− xi |
|
xj |
− xi |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||
где Ni и Nj – так |
называемые |
функции |
формы |
конечного элемента, |
|||||||||
ui и uj – значения функции u(x) в точках xi и xj, [N(e)] = [Ni Nj] – матричная строка |
|||||||||||||
|
|
|
|
(e) |
ui |
– вектор-столбец. Здесь следует отме- |
|||||||
|
|
|
= |
|
|||||||||
функций формы элемента, u |
|
|
|||||||||||
|
|
|
|
|
|
u j |
|
|
|
|
|
|
|
тить, что ряд терминов метода конечных элементов получили название из механики, где он впервые начал активно использоваться.
В случае разбиения области на два элемента (рис. 10, б) три узловые точки в каждом из них позволяют однозначно определить функции элементов в виде полиномов второй степени. Соответственно распределение u(х) на всей длине стержня будет аппроксимироваться кусочно-непрерывной квадратичной функцией. При этом общая аппроксимация для стержня может содержать излом из-за несовпадения в точке x3 углов наклона левой и правой парабол (их первых производных).
Для двухмерной или трехмерной задачи аппроксимация строится аналогичным образом. В зависимости от вида элементов (количества используемых в них узлов) также применяется линейная или нелинейная аппроксимация. Примеры аппроксимации двухмерной непрерывной функции u(x,y) приведены на рис. 11.
а |
б |
Рис. 11. Моделирование двухмерной скалярной функции с помощью линейной (а) и нелинейной (б) аппроксимации
В двухмерном случае функция формы конечного элемента будет представлена плоскостью, если для него взято минимальное число узлов, которое для треугольного элемента равно трем, а для четырехугольного – четырем. В этом случае используют линейную аппроксимацию u(x,y) ≈ α + αx x + αy y.
По аналогии с одномерным случаем линейный интерполяционный многочлен для простейшего треугольного элемента, включающего только три узла,
11
записывают в виде
|
(e) |
(e) |
, |
u (x, y)≈ Niui + N ju j + Nkuk = N |
u |
|
где Ni , Nj , Nk – функции формы элемента, ui , uj , uk – значения функции в узлах, принадлежащих элементу, [N(e)] – матричная строка функций формы элемента, [u(e)] – вектор-столбец значений функции u(x,y) в его узлах. Если элемент содержит большее количество узлов, то аппроксимирующая функция элемента будет отображаться криволинейной поверхностью.
Для всей расчетной области аппроксимацией распределения u(x,y) является кусочно-линейная (или кусочно-нелинейная) поверхность, каждый из участков которой определяется на отдельном элементе с помощью значений u(х,y) в принадлежащих ему узлах.
Для построения аппроксимации так, как это было показано выше, необходимо знать распределение u(х,y) во всей расчетной области. Однако до решения задачи эта зависимость обычно как раз и не известна. Способы отыскания решения рассмотрены ниже.
Построение решения. Вначале необходимо провести объединение конечных элементов в ансамбль. Значения u1, u2, u3, ... в узлах теперь будем рассматривать как неизвестные переменные, которые необходимо найти. Сформируем из этих значений, взятых по всей расчетной области, столбцовую матрицу, которую обозначим [u(Σ)]. Каждой строке [u(Σ)] соответствует узел сетки конечных элементов. Тогда аппроксимацией для всей расчетной области (в двухмерном случае) будет
u(x,y) ≈ [N(Σ)] [u(Σ)] ,
где [N(Σ)] – матричная строка функций формы всех конечных элементов, входящих в расчетную область. При составлении матриц [N(Σ)] и [u(Σ)] производится сквозная нумерация узлов. Для двух- и трехмерных задач эта процедура сложна и от нее в значительной степени зависит время расчета.
Следующий этап – построение разрешающей системы алгебраических уравнений на основе конечно–элементной аппроксимации. В результате решения задачи узловые значения u1, u2, u3, ... должны быть «подобраны» так, чтобы они обеспечивали наилучшее приближение к истинному распределению u(x,y). Этот «подбор» может осуществляться различными способами.
Существуют вариационная и проекционная формулировки метода конечных элементов. При вариационном подходе производится минимизация некоторого функционала, связанного с исходным дифференциальным уравнением. Например, в задачах механики может минимизироваться потенциальная энергия системы. Процесс минимизации приводит к решению системы алгебраических уравнений относительно узловых значений u(х).
Проекционный вариант метода конечных элементов является частным случаем метода взвешенных невязок. Последний основан на минимизации невязки в дифференциальном уравнении при подстановке в него приближенного
12
решения вместо точного. В методе конечных элементов оценка невязки производится по отдельным элементам и также сводится к решению системы алгебраических уравнений относительно узловых значений u(х). Количество неизвестных в задаче принято характеризовать параметром «DOF» – Degrees of Freedom (число степеней свободы).
При построении решения функции формы N позволяют определять в пределах каждого элемента пространственные дифференциальные операторы первого порядка от скалярного или векторного поля, например:
|
|
|
uuuuuuuur |
uuuuuuuuuuuur |
|
|
|
|
|
ur |
uuuuuuuuuuuur |
uuur |
|
|||||||
|
|
|
|
|
|
|
(e) |
|
(e) |
|
|
|
(e) |
|
(e) |
|||||
|
|
|
grad(u)=grad N |
|
u |
, |
div A =grad N |
|
||||||||||||
|
uuur |
|
|
|
|
|
|
A |
, |
|||||||||||
где |
|
– узловое распределение |
векторного |
поля |
ur |
|||||||||||||||
A(e) |
A в пределах |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uuuuuuuuuuuur |
|
ur |
|
|
|
|
uur |
r |
|
uur |
|
|
|
|
||||
элемента, |
|
|
(e) |
|
|
|
|
|
|
|
|
|||||||||
grad N |
|
=[αx ] ex |
+ αy |
|
ey , |
ex |
и ey – единичные базисные векто- |
|||||||||||||
ры (орты) декартовой системы координат.
В методе конечных элементов также как и в методе конечных разностей матрица коэффициентов системы уравнений включает большое число нулевых элементов, что облегчает решение задачи.
К достоинствам метода конечных элементов, благодаря которым он находит широкое применение, относятся гибкость и разнообразие сеток, четко формализованные алгоритмы построения дискретных задач для произвольных областей, простота учета естественных краевых условий. Кроме того, этот метод применим к широкому классу исходных задач, а оценки погрешностей приближенных решений, как правило, получаются при менее жестких ограничениях, чем в методе конечных разностей.
2.РАСЧЕТ РЕАКЦИИ КОНСТРУКЦИИ НА СТАТИЧЕСКУЮ НАГРУЗКУ
ВПАКЕТЕ SOLIDWORKS
Пакет SolidWorks позволяет выполнять конечно-элементный анализ конструкций с использованием четырех критериев прочности: максимальных эквивалентных напряжений по Мизесу (von Mises); максимальных касательных,
напряжений (Maximum Shear Stress); Мора-Кулона (Mohr-Coulomb); макси-
мальных нормальных напряжений (Maximum Normal Stress).
В базу данных SolidWorks для некоторых материалов включены экспериментальные диаграммы деформирования в пластической зоне и кривые усталости. Их названия сопровождаются постфиксами «SS» и «SN».
Расчет реакции конструкции на статическую нагрузку включает следующие основные этапы.
1.Создание исследования с указанием вида сетки конечных элементов.
2.Указание материалов (свойств материалов) элементов конструкции.
3.Задание ограничений (видов закреплений) и нагрузок (силовых воздей-
ствий).
13
4.Построение сетки конечных элементов.
5.Запуск расчета на выполнение.
6.Просмотр и анализ результатов, включая «эпюры» (распределения) механических напряжений (Stress), деформаций (Strain) и перемещений (Displacement), а также проверку прочности конструкции (Design Check).
3.УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ
1.Подготовьте геометрическую модель исследуемой конструкции.
2.Ознакомьтесь с порядком проведения линейного статического анализа
впакете SolidWorks.
3.Выполните линейный расчет реакции конструкции на статическую нагрузку в пакете SolidWorks.
4.Оформите отчет.
4.СОДЕРЖАНИЕ ОТЧЕТА
1.Цель работы.
2.Краткое описание геометрической модели (включая ее изображение), основные характеристики материалов, граничные условия.
3.Описание основных этапов расчета (копии экрана – модель сетки и приложенные ограничения/нагрузки).
4.Результаты («эпюры» напряжение, перемещения, деформация, проверки проекта).
5.Выводы по работе
5.КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Назовите известные инженерные и научные программы из семейства CAE-пакетов. Дайте их характеристику.
2.Какие методы численного решения находят применение в CAEпакетах? Какой из методов получил наибольшее распространение и почему?
3.Опишите кратко схему решения задачи методом конечных элементов.
4.Что такое функции формы в методе конечных элементов? Для чего они используются?
5.Что понимается под терминами «ограничения/нагрузки» в CAE-пакете
SolidWorks?
6.Какие виды сеток используются в CAE-пакете SolidWorks? Какая процедура может применяться для автоматического создания сетки конечных элементов?
7.Каким образом параметры настройки сетки в пакете SolidWorks влияют на величину «DOF»?
8.Что понимается под обозначением «DOF» в программе SolidWorks? Как величина «DOF» влияет на время расчета и погрешность расчета?
9.Каким образом в пакете SolidWorks оценивается предел прочности де-
14
тали при статическом нагружении?
10.Какого рода решатели и с какими опциями используются в пакете SolidWorks? Дайте их характеристику.
11.На основе каких конечных элементов обычно строится сетка в пакете SolidWorks и почему? Какими соображениями желательно руководствоваться при выборе размеров элементов и их пропорций?
12.В каких случаях применяют объемную сетку, а в каких – «оболочку»?
13.Какие исходные данные необходимо задать при расчете реакции конструкции на статическую нагрузку в пакете SolidWorks?
14.Какие критерии используются при оценке прочности детали в пакете SolidWorks? Дайте их характеристику.
15.Какой вид «эпюры», полученный при расчете статического нагружения в пакете SolidWorks, – деформация, перемещение или механическое напряжение – используется при оценке прочности конструкции?
16.К какой математической задаче сводится задача расчета деформации при статическом нагружении конструкции?
ЛАБОРАТОРНАЯ РАБОТА 2 НЕЛИНЕЙНЫЙ АНАЛИЗ
Цель работы: изучение основ проведения нелинейного статического анализа в пакете SolidWorks.
1. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
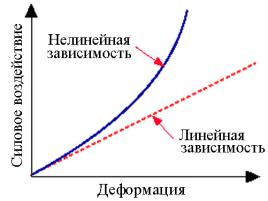
Линейный статический анализ предполагает, что отношения между силовым воздействием и вызванными ими деформациями линейны. Например, при удвоении величины нагрузки, смещение, напряжение материала, силы реакции, и т.д. также должны увеличиться вдвое.
На практике все конструктивные элементы начинают проявлять нелинейные свойства при некотором уровне нагрузки. Нелинейность может быть вызвана поведе-
нием материала, большими смещениями и контактными взаимодействиями.
В этом случае линейное приближение может привести к ошибочным результатам, потому что предположения, на которых он базируется, нарушаются. В то же время можно использовать нелинейный анализ для решения линейной задачи. При этом результаты могут немного отличаться из-за различия расчет-
15
ных процедур.
1.1. Источники нелинейности
Рассмотрим типичные виды и источники нелинейности в структурной механике – геометрическую нелинейность, физическую нелинейность материалов, контактную нелинейность.
Геометрические нелинейности связаны с тем, что влияние перемещения элементов механической системы на величину или направление действия граничных условий (сил и заделок), а также на свойства самой конструкции становится значительным. Так, например, при расчете прогиба пластины, – когда величина прогиба превышает половину ее толщины, линейное решение приводит к значительной погрешности.
Нелинейность материала выражается в зависимости характеристик упругости материала от истории нагружения. Ряд факторов может быть причиной нелинейного поведения материалов. К таким факторам относятся зависимость отношения напряжения к деформации материала в истории нагружения (например, в проблемах пластичности), продолжительность нагрузки (в усталостном анализе) и температура (при учете термопластичности).
Контактные нелинейности могут встречаться в нелинейных задачах, связанных с изменяющимся характером граничных условий в процессе их перемещения. При анализе сборок нелинейные эффекты возникают на границе контакта тел, когда даже небольшая нагрузка в начальный момент передается через относительно малую площадь (рис. 2). Как следствие, в этой зоне возможно существенное изменение формы. Еще один потенциальный источник нелинейности при расчете сборок – контактное трение.
1.2. Свойства материалов
Нелинейный анализ предлагает много типов моделей материалов (material models). В SolidWorks доступны различные модели материалов и типы моделей деформирования (табл. 1).
Назначение типа нелинейности для материала производится в окне «Материал» (Material) базы данных по материалам, которое открывается из Менеджера программы. Для этого используется контекстное меню пиктограммы, соответствующей телу твердотельной модели.
16
|
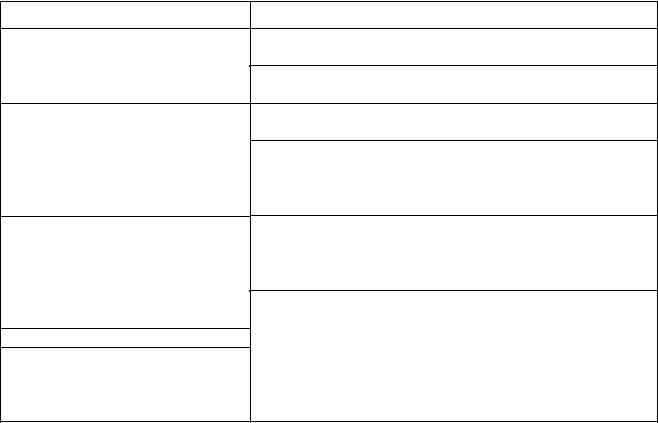
Таблица 1. Модели материалов в нелинейном анализе |
Упругие |
Линейно-упругие (Linear Elastic) изотропные (Isotropic), ортотропные |
(Elastic) |
(Orthotropic) материалы |
Нелинейно-упругие (Nonlinear Elastic) с назначаемой пользователем |
|
|
кривой «напряжение – деформация» |
Гиперупругие |
Модель Муни–Ривлипа (Mooney–Rivlin). |
(резиноподобные) |
Модель Огдена (Ogden). |
(Hyperelastic) |
Модель Блатца–Ко (Blatz–Ко). Данная модель наилучшим образом |
|
описывает поведение высокосжимаемых сред типа пенополиуретана. |
Пластические (вяз- |
Модель Мизеса (Von Mises Plasticity) с изотропным и кинематическим |
кие металлы и т.п.) |
упрочнением. |
|
Модель Треска (Tresca Plasticity) с изотропным и кинематическим уп- |
|
рочнением. Рекомендации по использованию данного критерия анало- |
|
гичны приведенным для критерия Мизеса. |
|
Модель Друкера–Прагера (Drucker-Prager) для упругой идеально пла- |
|
стической среды – используется для описания поведения сыпучих сред. |
Следует отметить, что в зависимости от выбранной модели материала вид используемой сетки конечных элементов может быть ограничен объемными или «толстыми» оболочечными элементами.
1.3.Проблемы и подходы к решению нелинейных задач
Внелинейном анализе жесткость структуры, прикладываемые нагрузки и/или граничные условия могут зависеть от вызванных ими перемещений конструкции. При этом по ходу решения равновесие структуры должно быть установлено в текущей конфигурации, которая априорно является неизвестной. Вследствие этого в каждом состоянии равновесия детали результирующая система уравнений будет нелинейной. Поэтому прямое решение системы уравнений невозможно и требуется использование итерационного метода.
Вотличие от линейных задач трудно, если не невозможно, реализовать единую стратегию решения нелинейных задач, применимую для всех случаев. Поэтому обычно используется ряд различных алгоритмов, обеспечивающих эффективное решение широкого спектра нелинейных задач.
Для нелинейного статического анализа в SolidWorks вводится понятие «кривых «времени» (Time curve). Кривые времени предписывают, как нагрузка или ограничение изменяются в течение шагов решения. Для нелинейного динамического анализа и нелинейного статического анализа с изменяющимися с течением времени свойствами материалов (например, вследствие усталости или нестационарных тепловых процессов), параметр «время» в расчете соответствует реальному времени, связанному с приложением нагрузок.
Выбор размера шага времени зависит от нескольких факторов, таких как уровень нелинейности задачи или процедура решения. При этом программа моделирования включает адаптивный алгоритмом с автоматическим выбором шага, облегчающим выполнение анализа и уменьшение вычислительных затрат.
17
2.ВЫПОЛНЕНИЯ НЕЛИНЕЙНОГО АНАЛИЗА В SOLIDWORKS
2.1.Предварительные сведения
Большинство этапов нелинейного анализа аналогичны используемым в линейном расчете. В нелинейном анализе важное место занимает назначение параметров вычислительного процесса. Основными моментами здесь являются: назначение рассматриваемого периода времени, приращения шага и действий, сопровождающих это приращение, а также допусков сходимости шагов итерационного процесса.
Нелинейный анализ требует определения метода управления решением задачи. По умолчанию как наиболее подходящий вариант для большинства случаев используется метод управления силой (Force). Метод контроля силы позволяет управлять каждой нагрузкой и ограничением индивидуально по времени. Методы контроля перемещения (Displacement) и длины дуги (Arc-Length) вычисляют коэффициент изменения для всех нагрузок на каждом шаге решения. Другими словами, все нагрузки изменяются пропорционально на каждом шаге решения.
Нелинейные модели могут быть построены на базе твердых тел, оболочек, а также базироваться на гибридных сетках с некоторыми ограничениями.
2.2. Порядок проведения расчета
Ниже представлена примерная последовательность выполнения нелинейного анализа.
1.Создайте нелинейное исследование.
2.Щелкните правой кнопкой мыши на пиктограмме исследования в менеджере COSMOSWorks и выберите пункт «Свойства». В окне свойств исследования определите параметры, необходимые для выполнения расчета.
3.Нажав на вкладке «Решение» (Solution) окна свойств исследования кнопку «Дополнительные параметры» (Advanced Options), выберите в открывшейся вкладке окна метод управления решением и вид решателя. По умолчанию установлен метод управления силой, итерационный решатель – алгоритм Ньютона-Рафсона (NR). Контактное описание поддерживается только в методе контроля силы.
Настройки, расположенные ниже в этой вкладке, также задаются в зависимости от выбранного метода управления решением. Для метода управления перемещением в разделе окна «Параметры управления смещением» следует проверить и при необходимости изменить «кривую времени» (Time Curve), определяющую характер изменения перемещения.
Параметры интервала/допуска (Step/Tolerance options), установленные по умолчанию, в большом числе случаев не требуют изменения.
4.Во вкладке «Решение» окна свойств исследования следует задать характеристики временного интервала. Если в качестве параметра, управляющего
18

решением, выбрана сила или перемещение следует задать параметры начала
(Start time), окончания (End Time) и приращения времени (Time increment) в
расчете. Если же используется метод контроля длины дуги, необходимо указать только приращение времени. В этом методе приращение времени используется программой для оценки начального приращения длины дуги.
Следует отметить, что выбор слишком большого шага по времени не только ухудшает качество решения, но и может привести к аварийному завершению расчета вследствие превышения максимального числа регулировок шага. Выбор чрезмерно малого приращения времени увеличивает время вычислений и может сопровождаться накоплением погрешности расчета.
Опция «Повторный запуск» (Restart) позволяет продолжить решение от последнего успешного шага решения. Чтобы сделать расчет прерываемым, надо выбрать опцию «Сохранить данные для повторного запуска анализа» (Save data for restarting the analysis) перед началом расчета.
Следует также проверить и при необходимости изменить «Параметры нелинейности геометрии» (Geometry nonlinearity options). После активизации опции больших смещений (Large displacement) контактная задача будет решаться методом последовательных нагружений с анализом на каждом шаге положения поверхностей, которые могут взаимодействовать между собой, и ориентации нормалей к ним (величина приращения нагрузки определяется программой). В противном случае нагрузка прикладывается полностью, а затем итерационная процедура рассчитывает площадку контакта. Действие опции «Обновить на-
правление нагрузки с отклонением» (Update load direction with deflection) пока-
зано на рис. 3.
При выборе решающей программы (Solver) следует учитывать, что прямой решатель (Direct Sparse) обеспечивает лучшую сходимость для большинства нелинейных задач. Итерационный метод (FFEPlus) позволяет снизить объем требуемой памяти и ускорение решения для больших задач.
а |
б |
в |
Рис. 3. Изменение направления действия нагрузки: a – нагрузка приложена по нормали к недеформированной геометрии; б – флаг для изменения направления нагрузки с отклонением отключен (первоначальное направление нагрузки поддерживается на деформированной геометрии); в – флаг изменения направления нагрузки установлен (направление нагрузки изменяется и остается нормальным к деформированной геометрии)
19
5.Для учета тепловых полей и потоков в окне свойств исследования выберите вкладку «Эффекты потока/Тепловые эффекты» (Flow/Thermal Effects) и установите необходимые настройки.
6.Определите характеристики материалов, нагрузки и ограничения, постройте сетку конечных элементов.
При использовании метода управления силой можно связать каждую нагрузку и ограничения с отдельной кривой времени. Каждая кривая должна быть задана на интервале от времени начала до времени окончания, которые заданы
висследовании.
При использовании метода контроля перемещения или длины дуги не требуется дополнительно привязывать нагрузку или ограничение к кривой времени.
7. Щелкните правой кнопкой мыши на папке «Параметры результатов» (Result Options) в дереве анализа и задайте следующие опции сохранения результата (см. табл. 2).
Опции результатов
Сохранить результаты
(Save Results)
Шаги решения – Набор 1 (Solution Steps - Set 1).
Появляется, если выбрано: Для указанных шагов решения
(For specified solution steps)
Шаги решения – Набор 2 (Solution Steps - Set 2).
Появляется, если выбрано: Для указанных шагов решения (Шаги решения – Набор 1)
Solution Steps - …
График отклика
(Response Plots)
Таблица 2. Опции сохранения результатов Параметры
Для всех шагов решения (For all solution steps) – про-
грамма сохраняет результаты на всех шагах решения Для указанных шагов решения (For specified solution steps) – сохраняются результаты указанных шагов
Start. Число на первом шаге решения End. Число на последнем шаге решения
Increment. Приращение шага решения
Start. Число на первом шаге решения
End. Число на последнем шаге решения
Increment. Приращение шага решения
…
Выберите вершины и / или контрольные точки, для которых результаты должны быть сохранены. Если не выбрана хотя бы одна точка, результат сохраняется для всех узлов
Если в последней из приведенных опций указаны вершины или справочные точки, для них после расчета будут сформированы графики отклика (Response Plot).
8. Запустите расчет (Run) и просмотрите результаты (View). При использовании метода контроля силы решение представлено в различные моменты времени (шаги решения). Для методов контроля перемещения или длины дуги результаты отображаются как функция нагрузки.
20