

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ»
Кафедра аэродинамики, конструкции и прочности летательных аппаратов
Ефимов В.В.
ДИНАМИКА И ПРОЧНОСТЬ АВИАЦИОННЫХ КОНСТРУКЦИЙ
Часть II
для студентов II курса направлений 162300 и 25.03.01 всех форм обучения
Москва – 2014
Рецензенты: д.т.н., проф. Ципенко В.Г., д.т.н., проф. Калугин В.Т.
Ефимов В.В.
Динамика и прочность авиационных конструкций: учебное пособие. Часть II. – М.: МГТУ ГА, 2014. – 72 с.
Данное пособие издается в соответствии с учебным планом для студентов 2-го курса направлений 162300 и 25.03.01 всех форм обучения.
Рассмотрено и одобрено на заседаниях кафедры 14.01.2014 и методического совета 14.02.2014.
3
Содержание
Введение...................................................................................................................... |
|
4 |
1. Расчет оболочек....................................................................................................... |
|
5 |
1.1. Безмоментная теория оболочек..................................................................... |
|
5 |
1.1.1. Основные определения......................................................................... |
|
5 |
1.1.2. Основные соотношения безмоментной |
теории оболочек |
|
вращения.......................................................................................................... |
|
8 |
1.1.3. Осесимметричное нагружение оболочки вращения.......................... |
9 |
|
1.2. Балочная теория оболочек........................................................................... |
|
11 |
1.2.1. Основные определения и допущения................................................ |
|
11 |
1.2.2. Определение нормальных напряжений............................................. |
|
14 |
1.2.3. Определение касательных напряжений............................................ |
|
15 |
2. Статическая устойчивость элементов летательных аппаратов......................... |
24 |
|
2.1. Основные подходы к исследованию устойчивости упругих систем....... |
25 |
|
2.2. Устойчивость стержней............................................................................... |
|
28 |
2.3. Устойчивость прямоугольных пластин...................................................... |
|
34 |
2.3.1. Основные положения.......................................................................... |
|
34 |
2.3.2. Устойчивость прямоугольной пластины, |
сжатой вдоль |
одной |
оси................................................................................................................... |
|
37 |
2.3.3. Устойчивость прямоугольной пластины при сдвиге....................... |
39 |
|
2.3.4. Устойчивость прямоугольной пластины при комбинированном на- |
||
гружении........................................................................................................ |
|
44 |
3. Динамика конструкций летательных аппаратов................................................ |
|
48 |
3.1. Общие уравнения динамики упругих систем............................................ |
|
48 |
3.1.1. Расчетные схемы конструкций летательных аппаратов.................. |
48 |
|
3.1.2. Принцип Д'Аламбера–Лагранжа........................................................ |
|
50 |
3.1.3. Уравнения Лагранжа второго рода.................................................... |
|
51 |
3.1.4. Уравнения колебаний упругой системы с конечным числом степе- |
||
ней свободы.................................................................................................... |
|
52 |
3.1.5. Уравнения колебаний упругой системы с бесконечным числом сте- |
||
пеней свободы................................................................................................ |
|
56 |
3.2. Методы и примеры исследования динамики упругих систем................. |
57 |
|
3.2.1. Система с одной степенью свободы.................................................. |
|
57 |
3.2.2. Система с конечным числом степеней свободы.............................. |
60 |
|
3.2.3. Системы с бесконечным числом степеней свободы........................ |
61 |
|
3.2.4. Формула Рэлея..................................................................................... |
|
65 |
3.2.5. Метод матричной итерации................................................................ |
|
67 |
Вопросы для самопроверки..................................................................................... |
|
70 |
Литература................................................................................................................. |
|
72 |
4
Введение
В части I учебного пособия по дисциплине «Динамика и прочность авиационных конструкций» были изложены основные сведения из теории упругости, а также методы расчета стержневых систем и пластин.
Настоящая, II-я часть учебного пособия, посвящена изучению теоретических основ расчета оболочек, подкрепленных тонкостенных конструкций, а также методов исследования устойчивости и динамики упругих систем.
Данные темы предусмотрены рабочей программой дисциплины «Динамика и прочность авиационных конструкций», входящей в учебный план подготовки студентов по направлениям 162300 и 25.03.01 – Техническая эксплуатация летательных аппаратов и двигателей.

5
1.Расчет оболочек
Об о л о ч к а – это тело, ограниченное двумя криволинейными поверхностями, расстояние между которыми h (толщина оболочки) существенно меньше других характерных размеров данного тела.
Оболочка как модель широко используется в расчетных схемах элементов летательных аппаратов, таких как, например, крылья, фюзеляжи, корпуса и гондолы двигателей, обтекатели, коки, баллоны с сжатым газом и т.п.
1.1.Безмоментная теория оболочек
Если можно принять, что напряжения по толщине оболочки h распределены равномерно, то говорят, что она находится в б е з м о м е н т н о м н а п р я - ж е н н о м с о с т о я н и и , т.к. равномерное распределение напряжений по толщине оболочки реализуется при отсутствии изгибающих моментов. Безмоментное напряженное состояние возникает также у оболочек, которые не имеют ци-
линдрической (изгибной) жесткости (D=Eh3 /[12(1−μ2 )]=0, где E – модуль
упругости первого рода; μ – коэффициент Пуассона), например, у оболочек аэростатов.
1.1.1. Основные определения
По аналогии с пластинами, рассмотренными в части I настоящего учебного пособия, поверхность, разделяющую толщину оболочки пополам, назовем с р е д и н н о й п о в е р х н о с т ь ю .
Свяжем с оболочкой систему координат α, β, γ (рис. 1.1).
|
γ |
h/2 |
|
|
|
dsα=Adα |
|
|
|
|
|
dsβ=Bdβ |
O |
h/2 |
|
|
R1 |
|
|
|
|
α |
|
|
R2 |
|
|
β |
|
|
|
Рис. 1.1. Система координат оболочки
|
|
|
6 |
|
|
В данной системе координат ось γ является прямолинейной и направлена |
|||||
по нормали к срединной поверхности, а оси α и β являются криволинейными и |
|||||
лежат в срединной поверхности. Мысленно проведем через ось γ семейство |
|||||
плоскостей. В результате пересечения этих плоскостей со срединной поверхно- |
|||||
стью образуется семейство кривых, проходящих через точку O. Среди этих кри- |
|||||
вых существуют две такие, у которых радиусы кривизны являются соответ- |
|||||
ственно максимальным и минимальным в данной точке. Касательные к этим |
|||||
кривым называются г л а в н ы м и н а п р а в л е н и я м и срединной поверхно- |
|||||
сти и являются ортогональными (примем это без доказательства). |
|||||
Кривые, касающиеся в каждой точке главных направлений, называются |
|||||
л и н и я м и |
г л а в н ы х |
к р и в и з н и используются в качестве координатных |
|||
линий α и β. Радиусы кривизны этих кривых в точке O называются п е р в ы м |
|||||
и в т о р ы м |
г л а в н ы м и |
р а д и у с а м и |
к р и в и з н ы |
срединной поверх- |
|
ности и обозначаются соответственно R1 и R2 (рис. 1.1). |
|
||||
Длины элементарных участков координатных линий α и β запишем в |
|||||
виде (рис. 1.1) |
|
dsα=A d α, dsβ=B d β, |
(1.1) |
||
|
|
|
|||
где A и B – масштабные коэффициенты. |
|
|
|||
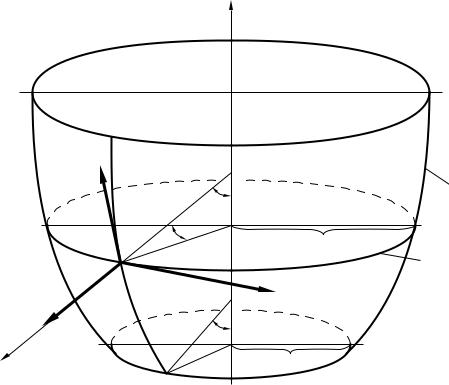
Рассмотрим оболочку вращения. Срединная поверхность оболочки вра- |
|||||
щения получается в результате мысленного вращения плоской кривой относи- |
|||||
тельно оси, лежащей в плоскости этой кривой (рис. 1.2). |
|
||||
|
|
|
x |
|
|
|
qα |
|
|
|
меридиан |
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
β |
|
r |
параллель |
|
|
|
|
|
|
|
qγ |
|
qβ |
|
|
|
|
α0 |
|
|
|
|
|
|
|
|
|
γ |
|
|
r0 |
|
|
|
|
Рис. 1.2. Оболочка вращения |
|
||

7
Такая кривая называется м е р и д и а н о м . Меридианы являются линиями главных кривизн и их принимают в качестве координатных линий. Окружности, образованные пересечением срединной поверхности оболочки вращения с плоскостями, перпендикулярными ее оси вращения x, называются п а р а л - л е л я м и , они представляют собой семейство других координатных линий. При этом необходимо обратить внимание на то, что параллели не являются линиями главных кривизн в соответствии с данным выше определением.
В качестве криволинейных координат, отсчитываемых вдоль меридианов
и параллелей, возьмем соответственно углы α и β. При этом угол α – это угол, который нормаль к срединной поверхности образует с осью вращения оболоч-
ки x; угол β – это угол, отсчитываемый вдоль параллели от некоторой заданной меридиональной плоскости.
Первый главный радиус кривизны срединной поверхности оболочки вращения R1 равен радиусу кривизны меридиана. Второй главный радиус R2 равен отрезку нормали к срединной поверхности до оси вращения оболочки x
(рис. 1.3) |
|
|
|
|
r |
|
|
|
|
|
|
|||
|
|
|
R |
= |
|
, |
|
|
(1.2) |
|||||
|
|
|
|
sin α |
|
|
||||||||
где r – радиус параллели. |
|
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
R1 |
|
|
|
|
|
|
|||
|
|
α |
|
dα |
|
|
|
|
|
|
||||
|
|
|
|
|
|
R2 |
|
|
|
dr |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
dsα |
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
r0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 1.3. Геометрия |
|
меридиана оболочки вращения |
||||||||||||
|
||||||||||||||
Радиусы R1 и R2 не являются независимыми. Из рис. 1.3 следует, что |
||||||||||||||
ds =R |
|
d α |
и ds = |
dr |
. |
(1.3) |
||||||||
|
|
|||||||||||||
α |
1 |
|
|
|
|
α |
|
cosα |
|
|
|
|||

|
|
8 |
|
|
|
|
Откуда |
|
|
|
|
||
R1 cosα d α=dr. |
(1.4) |
|||||
С учетом (1.2) получим |
|
|
|
|
||
R1 cosα= |
dr |
= |
d |
(R2 sin α). |
(1.5) |
|
d α |
d α |
|||||
|
|
|
|
|||
1.1.2. Основные соотношения безмоментной теории оболочек вращения
Рассмотрим тонкую оболочку вращения (рис. 1.2), считая, что она находится в безмоментном напряженном состоянии. Выделим бесконечно малый
элемент оболочки (рис. 1.4), находящийся под действием усилий Nα, Nβ, Nαβ и заданной поверхностной нагрузки с компонентами qα, qβ, qγ, направленными вдоль координатных линий α, β и нормали γ соответственно.
x 
R1 dα 
N α+ |
∂ N α |
|
d α |
|
|
|
|
|
|
|
d r |
|
|
|
|
|
|
|
α |
|
|
|
|
|
r+ |
d α |
|
|
|
|
|
|
|||||||
∂α |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
d α |
R2 |
|
|
|
|||||||||
|
|
|
|
|
|
∂ N αβ |
|
|
|
|
|
|
r |
||||||
|
|
|
|
N αβ+ |
d α |
|
|
|
|
||||||||||
Nβ |
|
|
|
|
∂α |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
qα |
|
|
|
|
|
|
|
|
|
|
|
|
dβ |
|
||
|
|
|
|
qβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nαβ |
|
|
|
|
|
|
|
|
|
|
|
∂ N β |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
N |
|
+ |
d β |
|||||
|
|
qγ |
|
|
|
|
|
|
|
|
|
β |
∂β |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
N |
|
|
|
|
|
N αβ+ |
∂ N αβ |
d β |
|
|||||||
|
|
|
|
|
αβ |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
∂β |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
γ |
|
|
|
|
|
Nα |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.4. К рассмотрению равновесия элемента оболочки вращения при безмоментном напряженном состоянии
Составим уравнения равновесия рассматриваемого элемента оболочки. В направлении касательной к меридиану получим