

Задание № 2.
Программное управление двигателем по заданной тахограмме
Цель: формирование у студентов навыков использования микроконтроллеров в качестве устройства управления объектом, в качестве которого выступает двигатель постоянного тока независимого возбуждения (ДПТНВ).
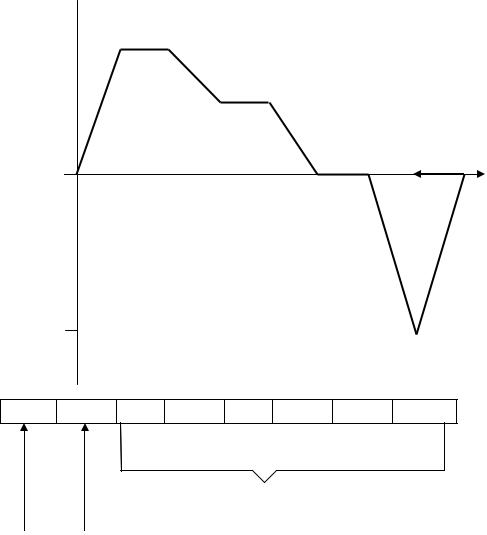
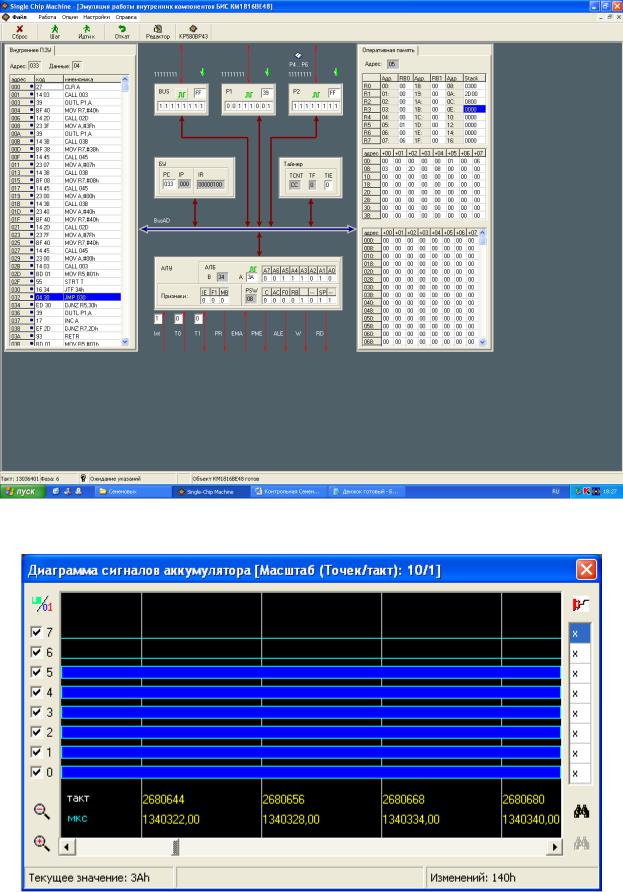
Задание. Используя систему моделирования SCM 1.38, написать на языке ассемблера программу реализации тахограммы работы ДПТНВ, отладить ее в редакторе симулятора, скомпилировать на язык 16-ричных кодов и запрограммировать УМПК-48 для получения результатов выполнения программы (варианты тахограмм см. в приложении 2). Последние выводятся в восьмиразрядный порт P1 МК48, к которому подключены широтно-импульсный преобразователь и силовая часть. В разряды порта P1.0 – P1.5 выводится код скорости, а в разряд P1.6 – знак скорости (0 – положительная скорость, 1 – отрицательная).
Пояснения к выполнению задания.
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T = const |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
t7 |
t8 |
||||||||
–0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
–1
Р1: |
Р1.7 |
Р1.6 Р1.5 Р1.4 Р1.3 Р1.2 |
Р1.1 |
Р1.0 |
|
код скорости
(не использовать) реверс
0 = +
1 = –
50
t1 = t2 = 5 c
ωmax = 3F; 0,5 ωmax = 1F; 0 ωmax = 00 – неподвижен.
τ1 = 80 mс
τ2 = 5 с – это три подпрограммы формирования временной задержки
τ3 = 160 mс
Создаем программу управления ДПТ:
51
Скорость ДПТ доведена до максимума, после чего произведена 5 с задержка:
52

Скорость двигателя составляет 50 %:
Двигатель стоит 5 с:
Затем включается реверс:
53

Скорость двигателя доводим до максимума:
Через 5 с скорость двигателя гасим до 0:
После этого ДПТ начинает работу по прежней тахограмме:
54